
增强舰船目标检测SAR图像数据的方法.pdf

山梅****ai

1/9

2/9
3/9
4/9
5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
增强舰船目标检测SAR图像数据的方法.pdf
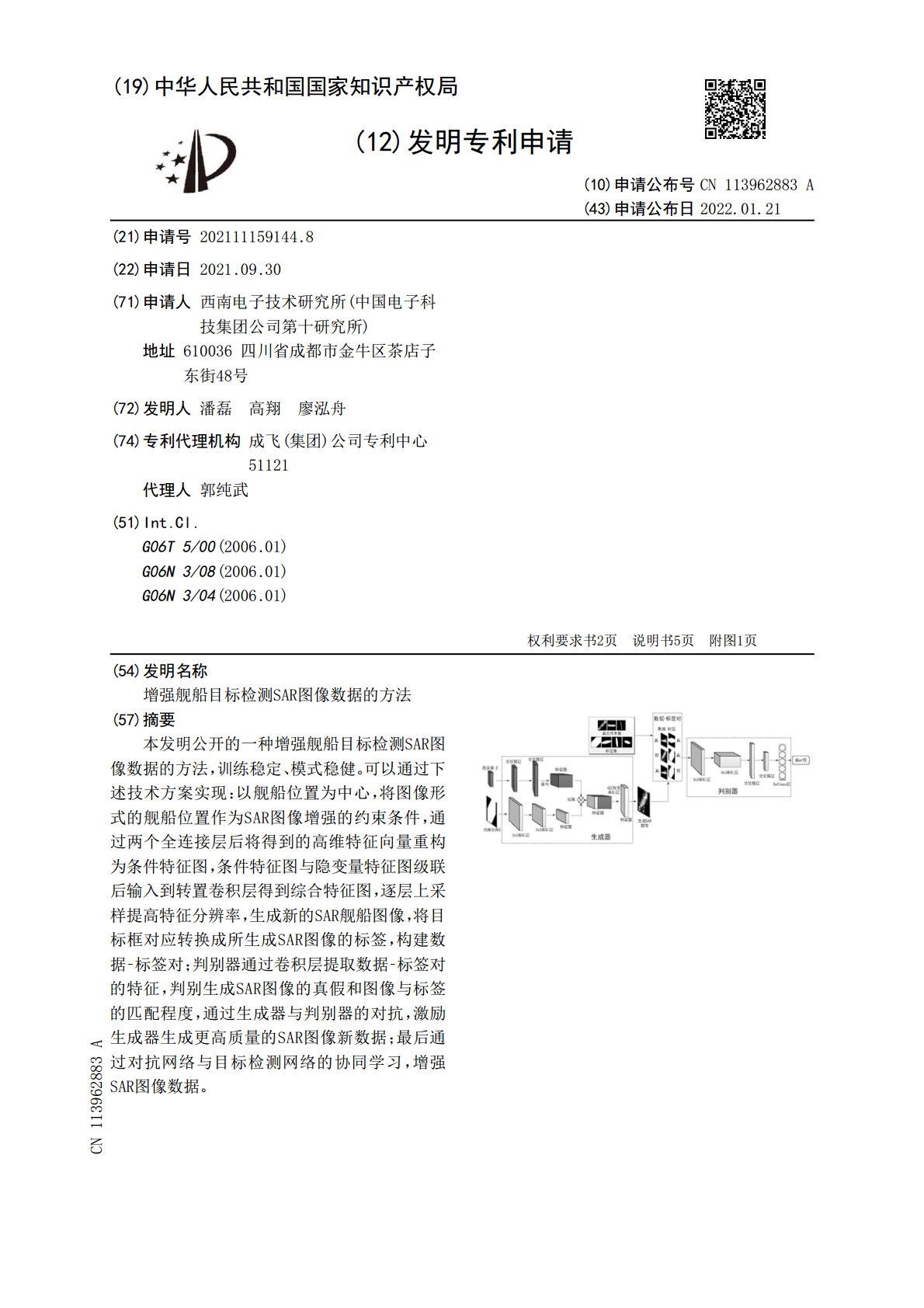
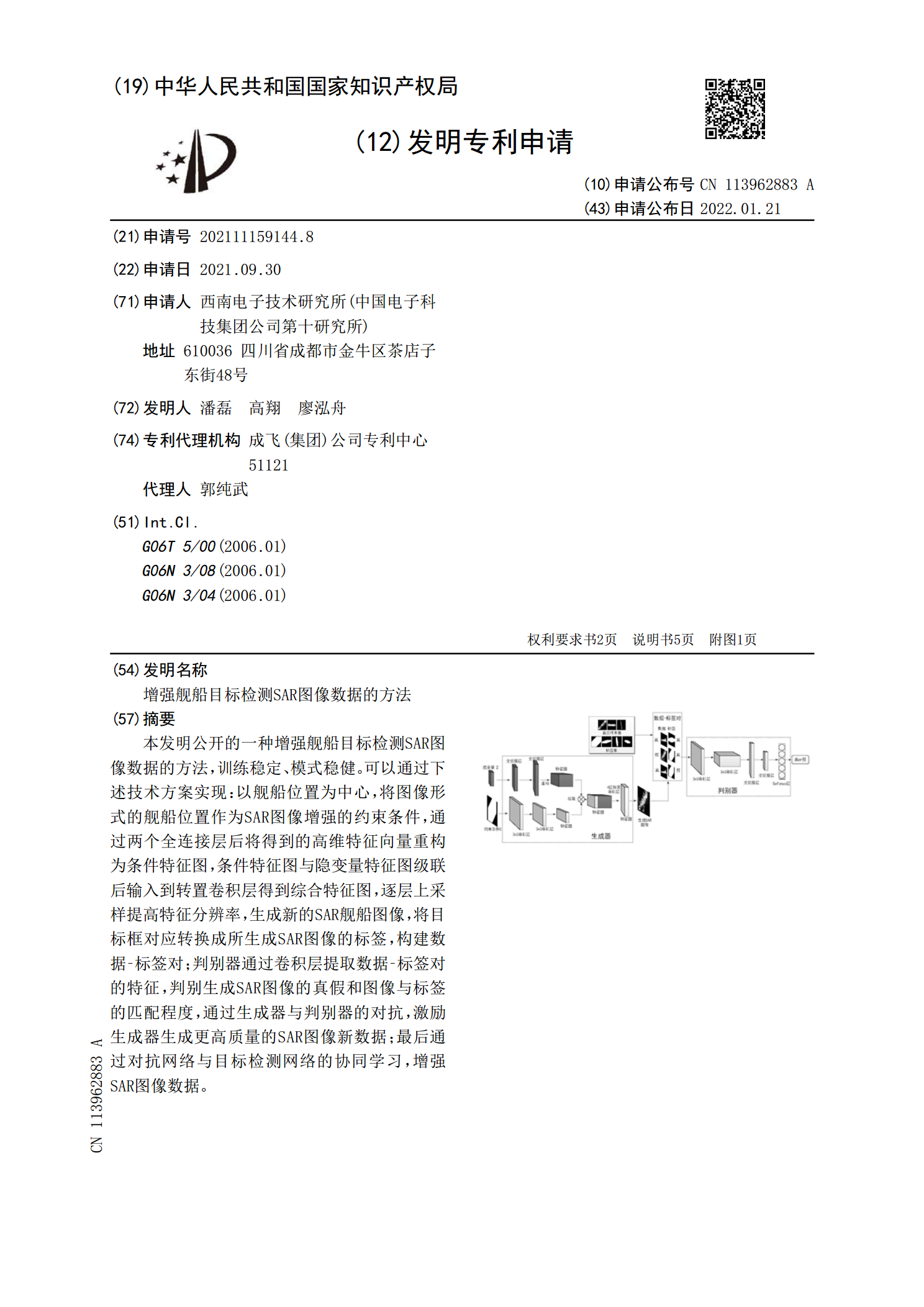
本发明公开的一种增强舰船目标检测SAR图像数据的方法,训练稳定、模式稳健。可以通过下述技术方案实现:以舰船位置为中心,将图像形式的舰船位置作为SAR图像增强的约束条件,通过两个全连接层后将得到的高维特征向量重构为条件特征图,条件特征图与隐变量特征图级联后输入到转置卷积层得到综合特征图,逐层上采样提高特征分辨率,生成新的SAR舰船图像,将目标框对应转换成所生成SAR图像的标签,构建数据‑标签对;判别器通过卷积层提取数据‑标签对的特征,判别生成SAR图像的真假和图像与标签的匹配程度,通过生成器与判别器的对抗,
基于图像增强与多重检测的SAR图像舰船目标快速检测方法.pdf
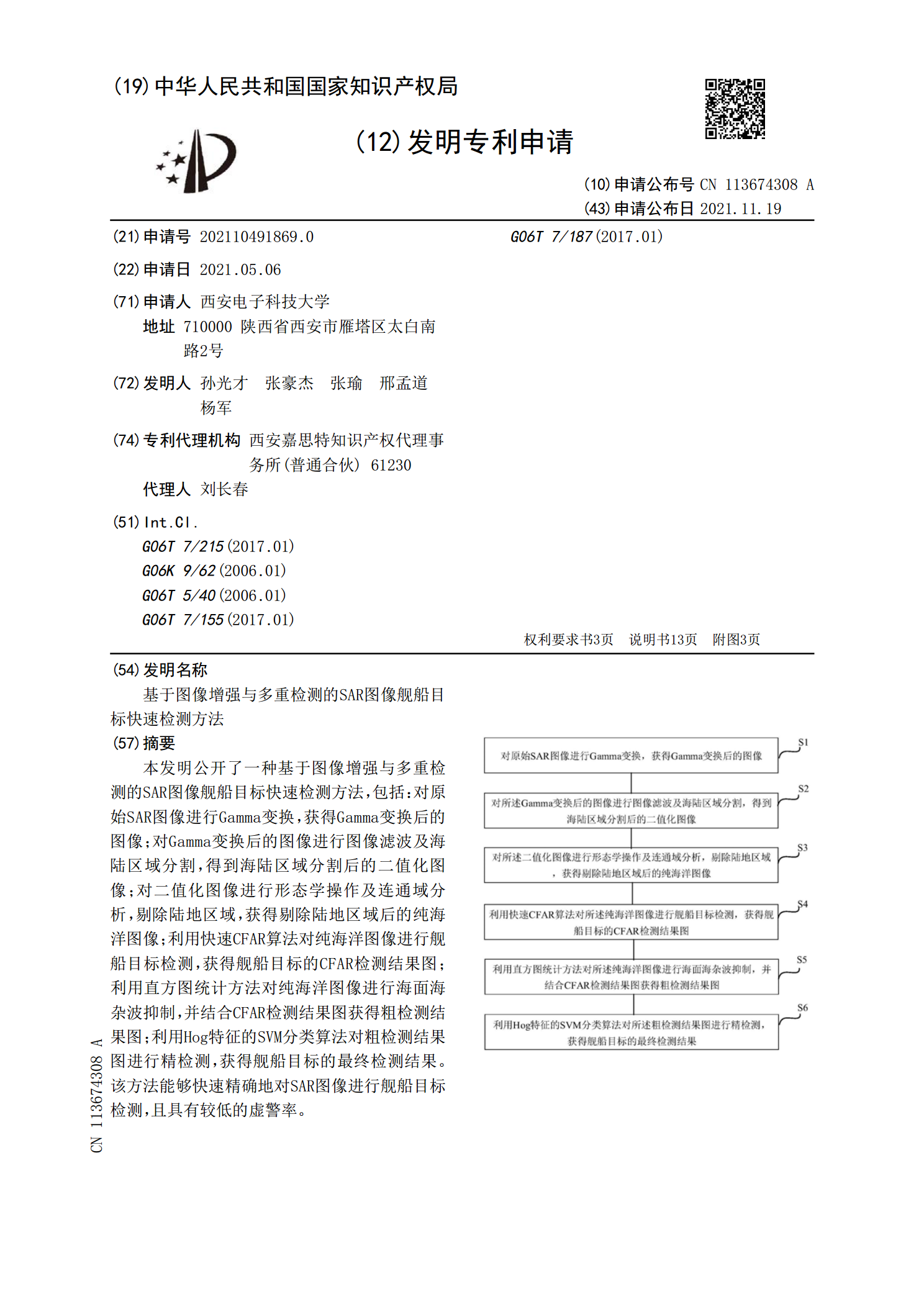
本发明公开了一种基于图像增强与多重检测的SAR图像舰船目标快速检测方法,包括:对原始SAR图像进行Gamma变换,获得Gamma变换后的图像;对Gamma变换后的图像进行图像滤波及海陆区域分割,得到海陆区域分割后的二值化图像;对二值化图像进行形态学操作及连通域分析,剔除陆地区域,获得剔除陆地区域后的纯海洋图像;利用快速CFAR算法对纯海洋图像进行舰船目标检测,获得舰船目标的CFAR检测结果图;利用直方图统计方法对纯海洋图像进行海面海杂波抑制,并结合CFAR检测结果图获得粗检测结果图;利用Hog特征的SVM

SAR图像舰船目标检测的信息几何方法.docx
SAR图像舰船目标检测的信息几何方法信息几何方法在目标检测领域得到了广泛应用,它通过从数据中提取几何结构和局部特征,可以提升目标检测的准确性和鲁棒性。其中,SAR图像舰船目标检测是应用信息几何方法的一个重要应用场景。随着SAR技术的不断发展和舰船目标检测需求的不断增加,如何提高SAR图像舰船目标检测的性能成为了一个热门的研究课题。本文将从信息几何方法的基本原理、应用于SAR图像舰船目标检测的相关方法和未来的研究方向等角度进行阐述。信息几何方法的基本原理信息几何方法是一种基于局部几何结构的特征提取和表示方法

基于RetinaNet的SAR图像舰船目标检测.docx
基于RetinaNet的SAR图像舰船目标检测标题:基于RetinaNet的SAR图像舰船目标检测摘要:合成孔径雷达(SyntheticApertureRadar,SAR)技术在航海领域具有广泛应用。SAR图像的特点使得舰船目标的检测面临许多挑战。目前,深度学习方法已经在目标检测中取得了显著的成功。本文提出了一种基于RetinaNet的SAR图像舰船目标检测方法。实验结果表明,该方法能够有效地检测出SAR图像中的舰船目标,并具有较高的检测精度和鲁棒性。1.引言随着合成孔径雷达技术的不断发展,SAR图像在航
一种SAR图像停泊舰船目标检测方法.pdf
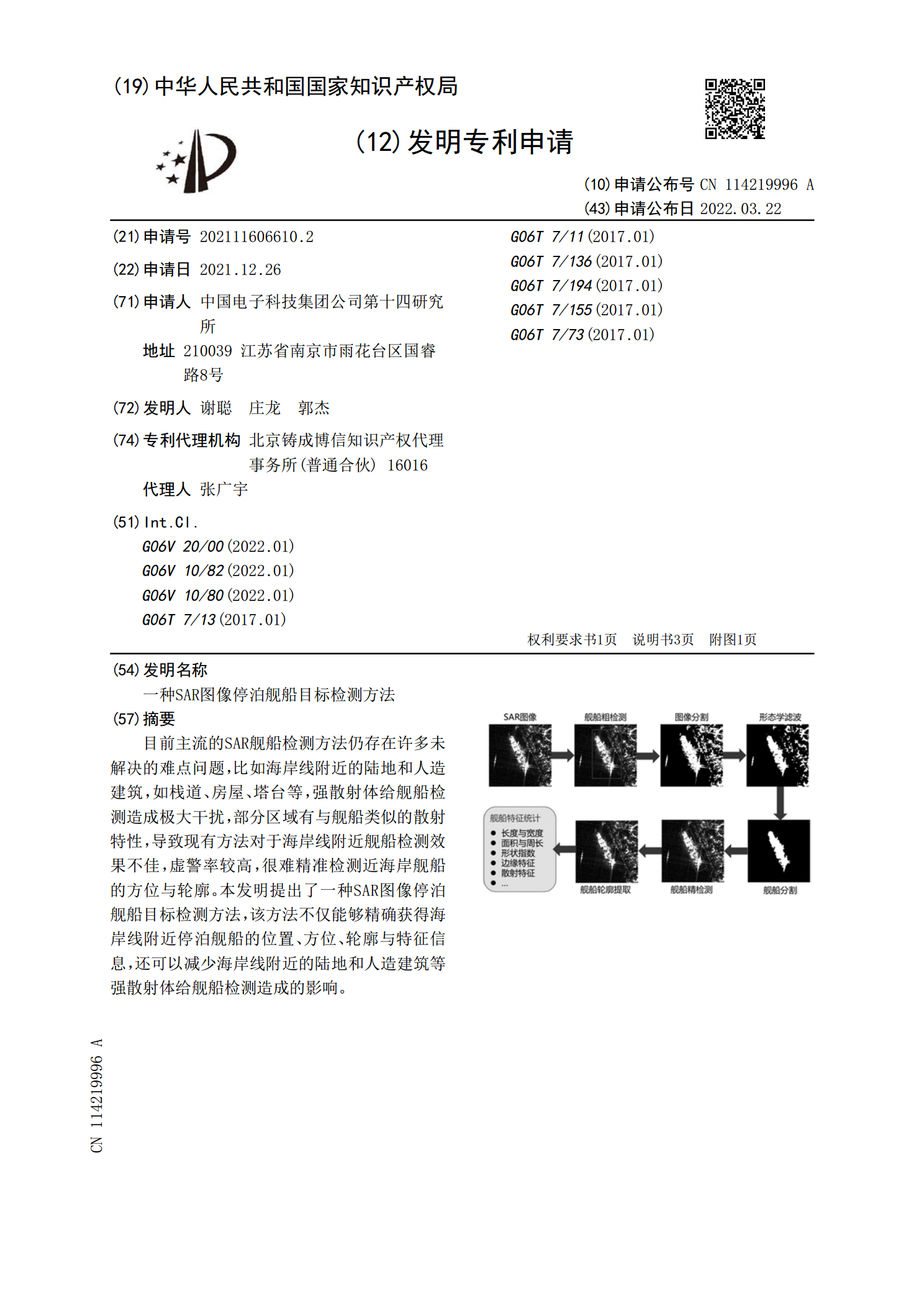
目前主流的SAR舰船检测方法仍存在许多未解决的难点问题,比如海岸线附近的陆地和人造建筑,如栈道、房屋、塔台等,强散射体给舰船检测造成极大干扰,部分区域有与舰船类似的散射特性,导致现有方法对于海岸线附近舰船检测效果不佳,虚警率较高,很难精准检测近海岸舰船的方位与轮廓。本发明提出了一种SAR图像停泊舰船目标检测方法,该方法不仅能够精确获得海岸线附近停泊舰船的位置、方位、轮廓与特征信息,还可以减少海岸线附近的陆地和人造建筑等强散射体给舰船检测造成的影响。