
一种基于可行点追踪的机载MIMO雷达收发联合设计方法.pdf

书生****22


1/10
2/10

3/10
4/10

5/10
6/10
7/10
8/10

9/10

10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于可行点追踪的机载MIMO雷达收发联合设计方法.pdf
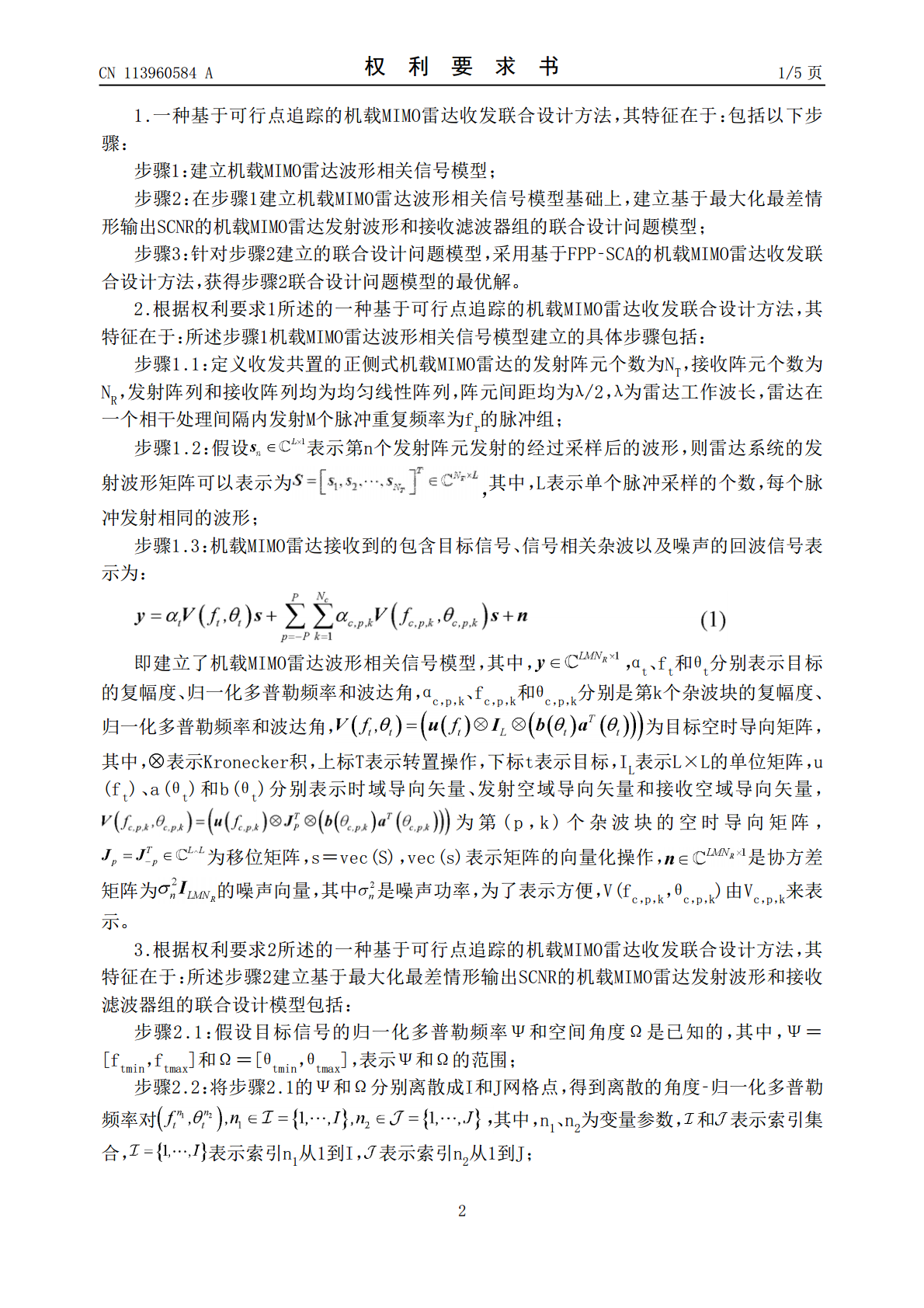
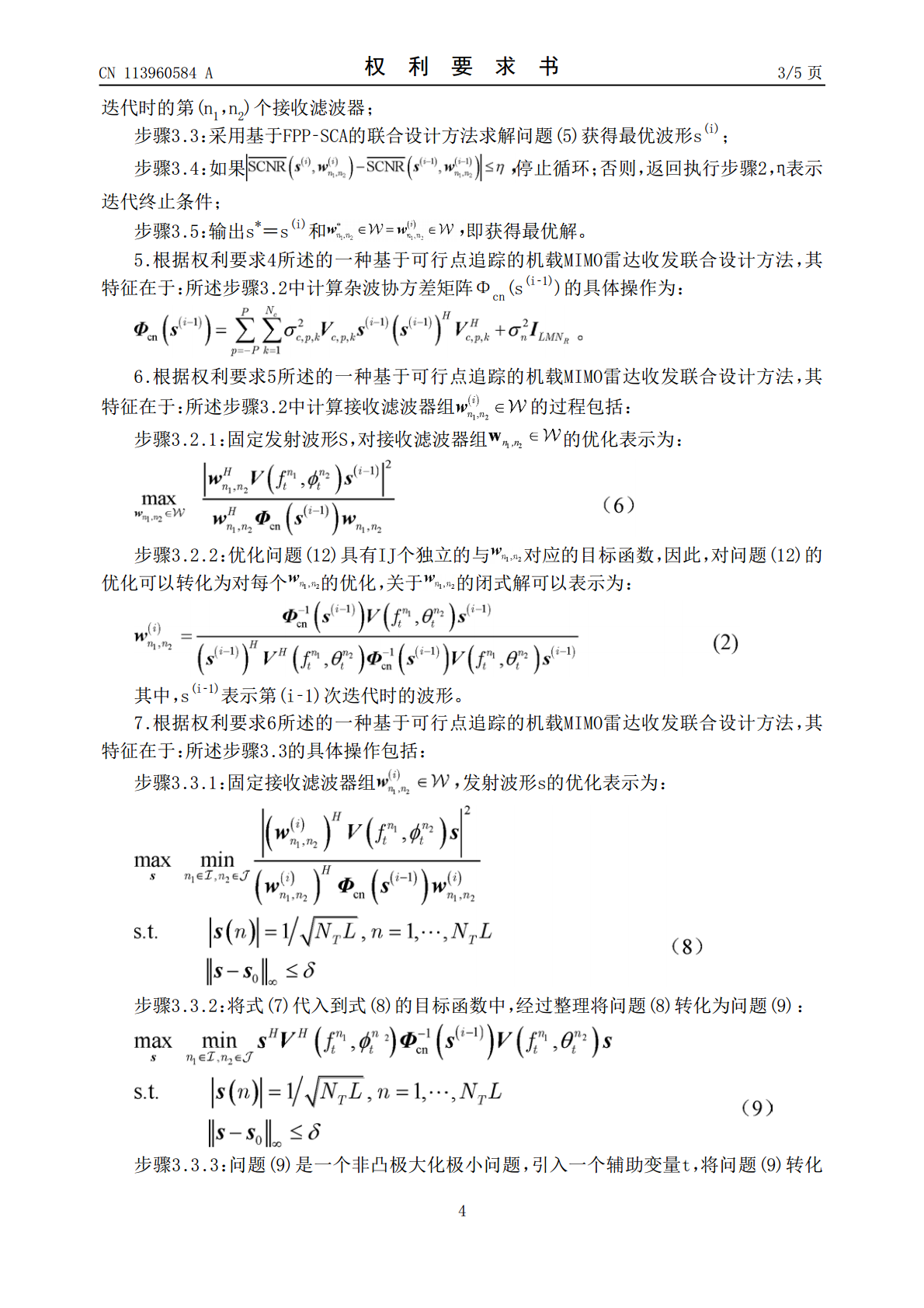
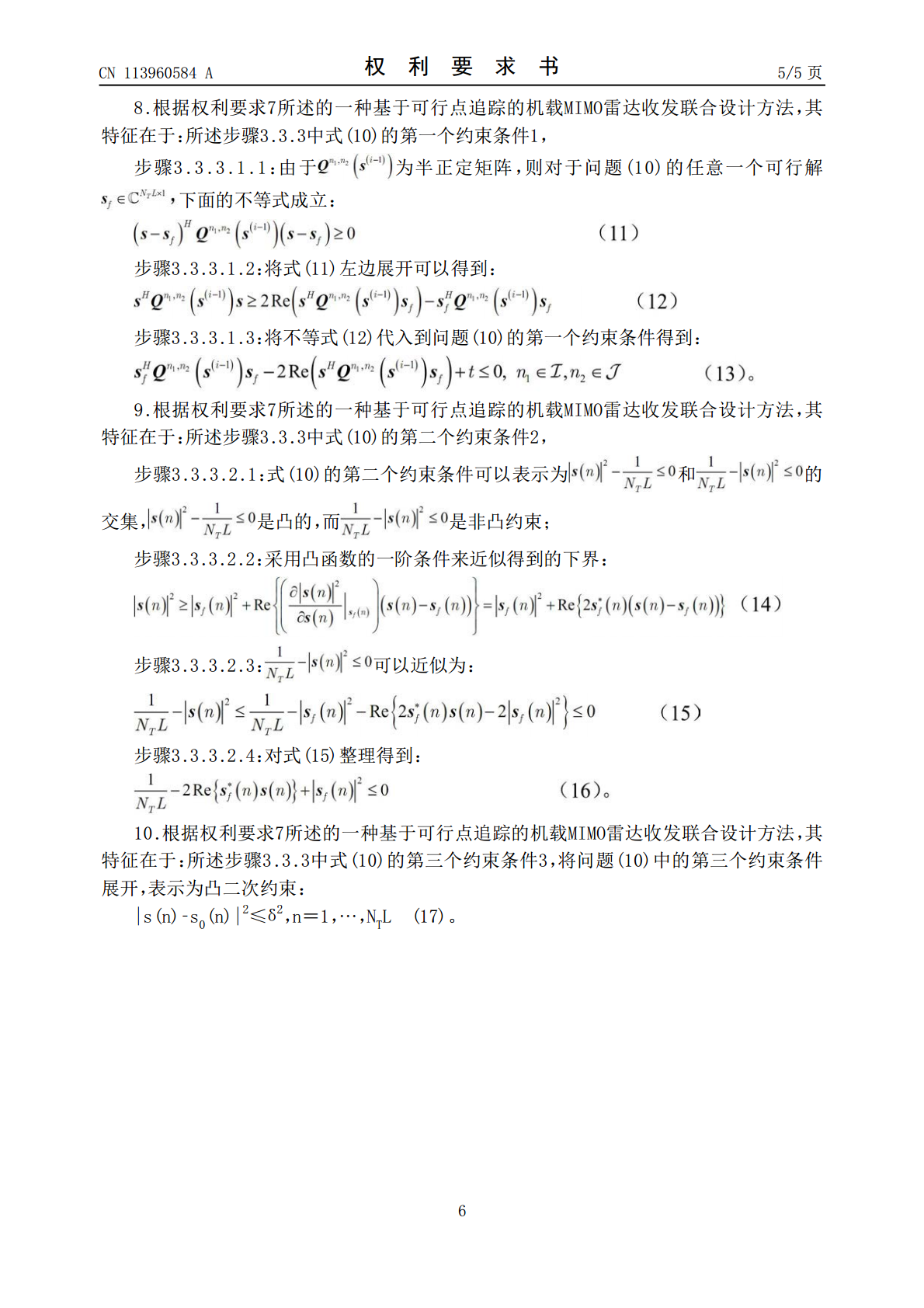
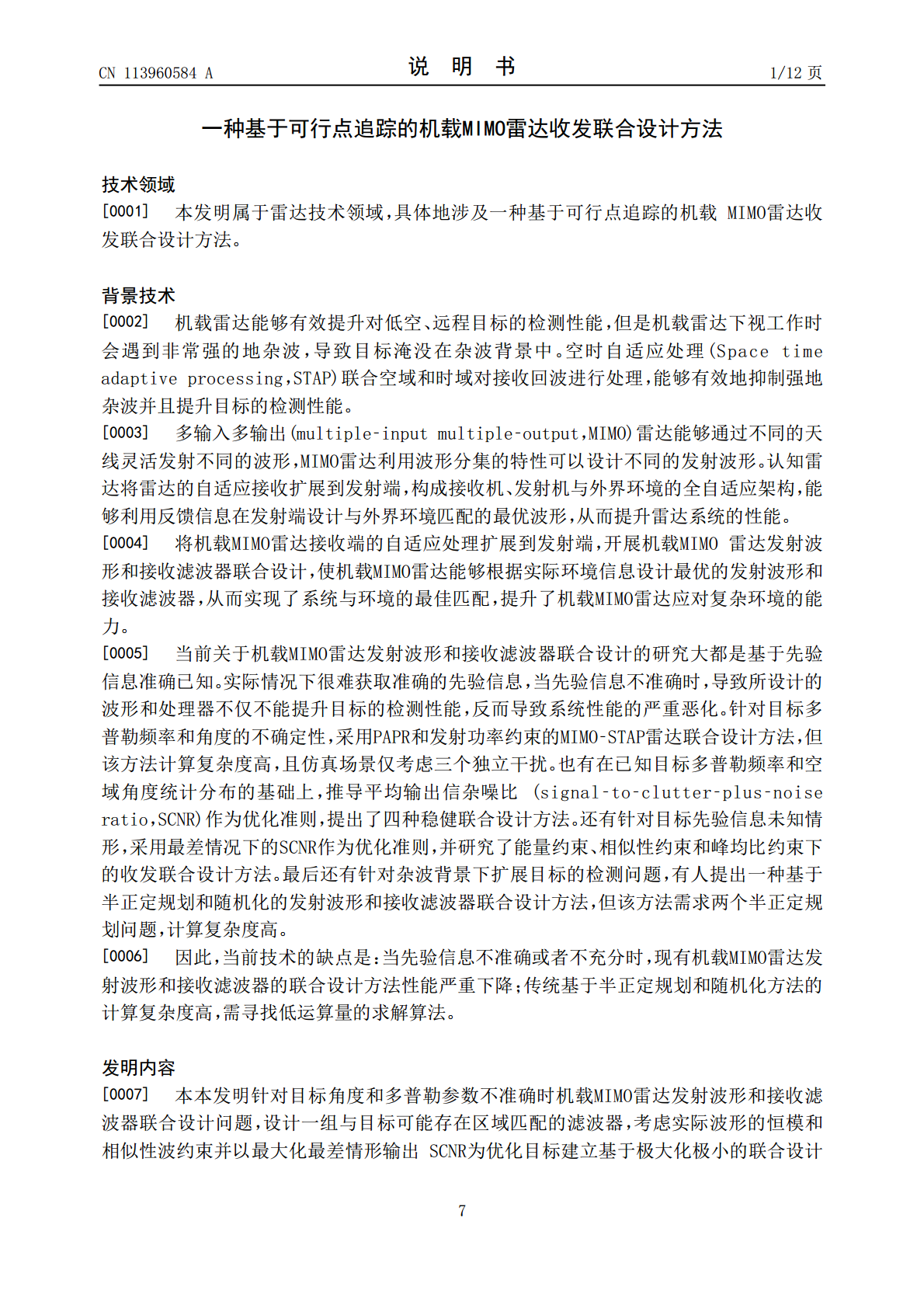
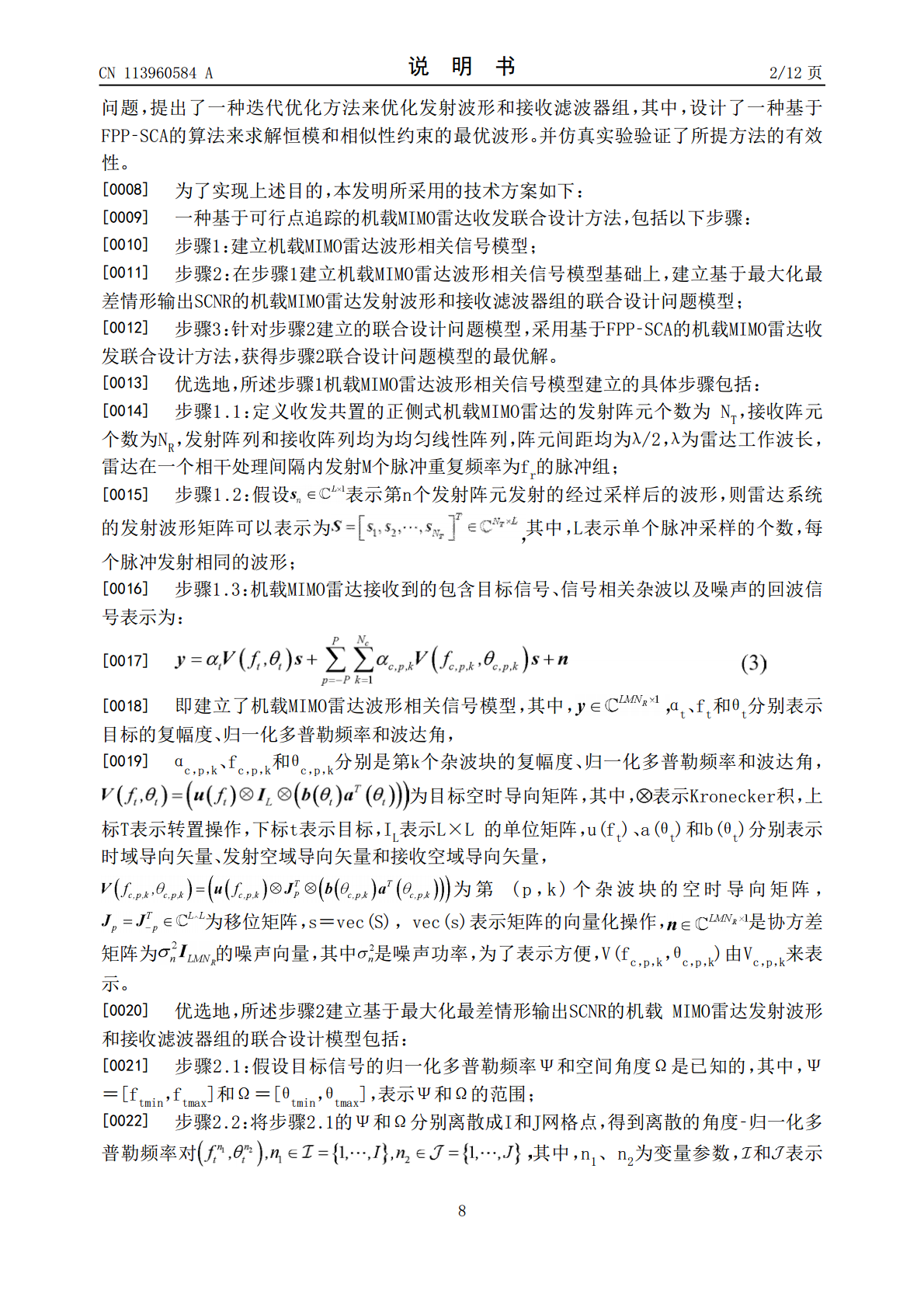
本发明属于雷达技术领域,具体地涉及一种基于可行点追踪的机载MIMO雷达收发联合设计方法。包括以下步骤:步骤1:建立机载MIMO雷达波形相关信号模型;步骤2:建立基于最大化最差情形输出SCNR的机载MIMO雷达发射波形和接收滤波器组的联合设计问题模型;步骤3:针对步骤2建立的联合设计问题模型,采用基于FPP‑SCA的机载MIMO雷达收发联合设计方法,获得步骤2联合设计问题模型的最优解。通过在目标可能出现的区域设计一组接收滤波器来解决目标参数不确定带来的输出SCNR的下降问题,设计了一种基于FPP‑SCA的联

基于极大化极小的机载MIMO雷达目标稳健检测联合设计方法.pdf
本发明公开了基于极大化极小的机载MIMO雷达目标稳健检测联合设计方法,包括Step1.建立机载MIMO雷达波形相关信号模型;Step2.在机载MIMO雷达波形相关信号模型的基础上,建立基于极大化极小的机载MIMO雷达稳健联合设计问题模型;Step3.针对基于极大化极小的机载MIMO雷达稳健联合设计问题模型,设计机载MIMO雷达发射波形和接收滤波器组稳健联合优化方法;本方法通过在目标可能出现的区域设计一组滤波器,并以收滤波器组输出端的最坏信干噪比作为优化准则,同时考虑波形的能量约束和峰均比约束,提出了一种基
基于发射波束域的机载MIMO雷达发射接收稳健联合优化方法.pdf
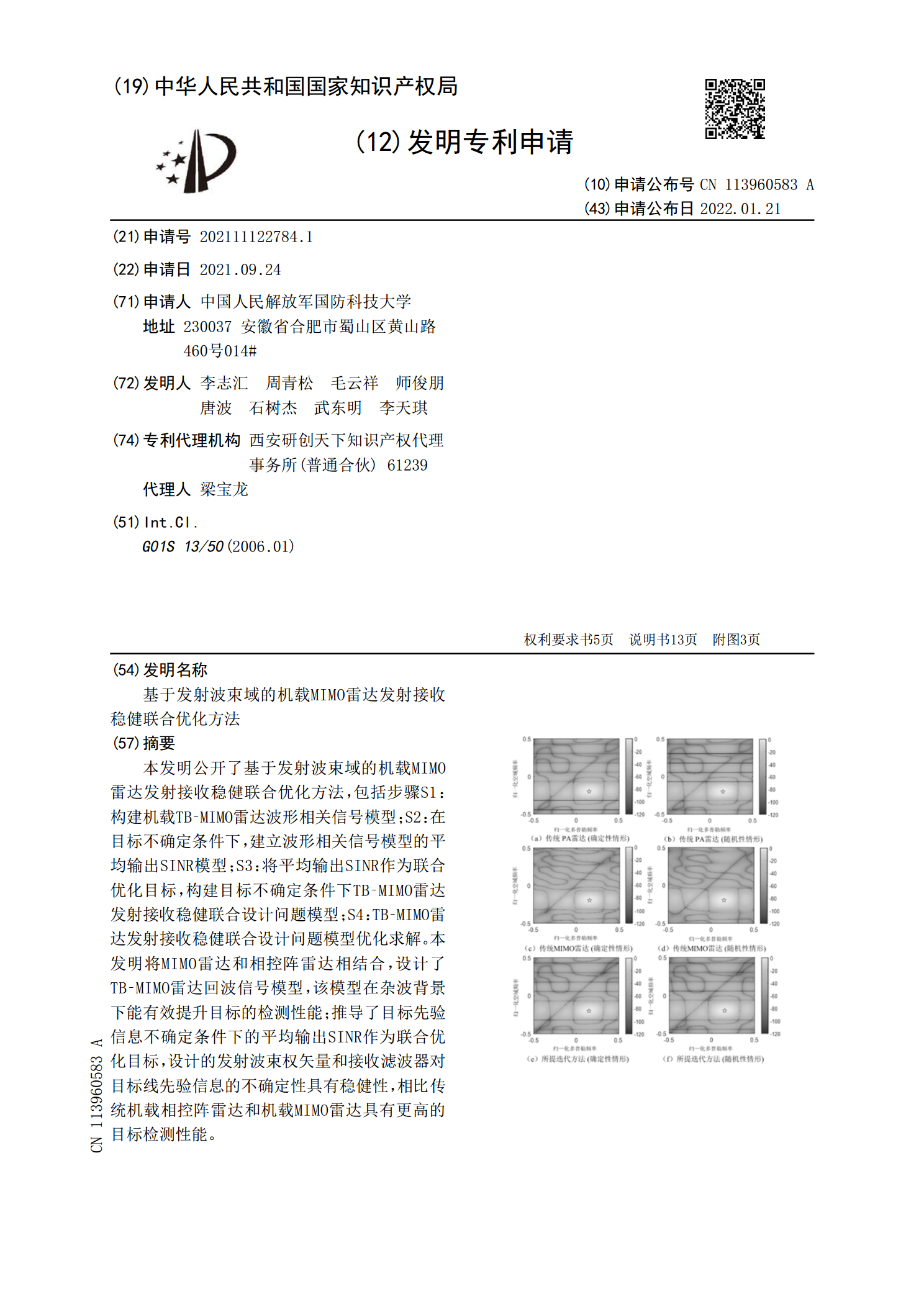
本发明公开了基于发射波束域的机载MIMO雷达发射接收稳健联合优化方法,包括步骤S1:构建机载TB‑MIMO雷达波形相关信号模型;S2:在目标不确定条件下,建立波形相关信号模型的平均输出SINR模型;S3:将平均输出SINR作为联合优化目标,构建目标不确定条件下TB‑MIMO雷达发射接收稳健联合设计问题模型;S4:TB‑MIMO雷达发射接收稳健联合设计问题模型优化求解。本发明将MIMO雷达和相控阵雷达相结合,设计了TB‑MIMO雷达回波信号模型,该模型在杂波背景下能有效提升目标的检测性能;推导了目标先验信息

一种稳健的大阵列MIMO雷达目标收发角联合估计方法.pdf
本发明提供一种稳健的大阵列MIMO雷达目标收发角联合估计方法,属于多输入多输出雷达目标参数估计领域。该方法基于线性收缩和随机矩阵理论,其实现步骤包括:利用回波信号构造观测数据的随机矩阵模型,在非高斯噪声背景下,通过定点迭代求得其协方差矩阵的极大似然估计,当收发阵元数大于快拍数时,利用线性收缩技术得到稳健的协方差矩阵估计,利用围线积分、Stieltjes变换以及留数定理构造稳健的代价函数,对代价函数进行谱峰搜索求解目标收发角。优点是所提出方法在非高斯噪声背景下具有稳健的估计性能,同时适用于收发阵元数大于快拍

恒模约束下机载MIMO雷达的稳健发射接收联合优化方法.pdf
本发明公开了一种恒模约束下机载MIMO雷达的稳健发射接收联合优化方法,包括以下步骤:机载MIMO雷达快时间波形相关信号模型的建立;稳健的发射接收联合设计模型的建立;接收滤波器的优化;基于分式规划和Powermethod‑like迭代,或者基于半正定规划和随机化的稳健恒模发射波形优化;利用优化结果进行STAP处理。本发明考虑目标多普勒频率和空间锥角存在着不确定性,以平均输出SCNR作为优化目标,即最大化平均输出SCNR,同时保持发射波形的恒模约束,提出了基于分式规划和Powermethod‑like迭代