
基于全网通和物联网的低速车智能驾驶交互系统.pdf

猫巷****晓容

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于全网通和物联网的低速车智能驾驶交互系统.pdf
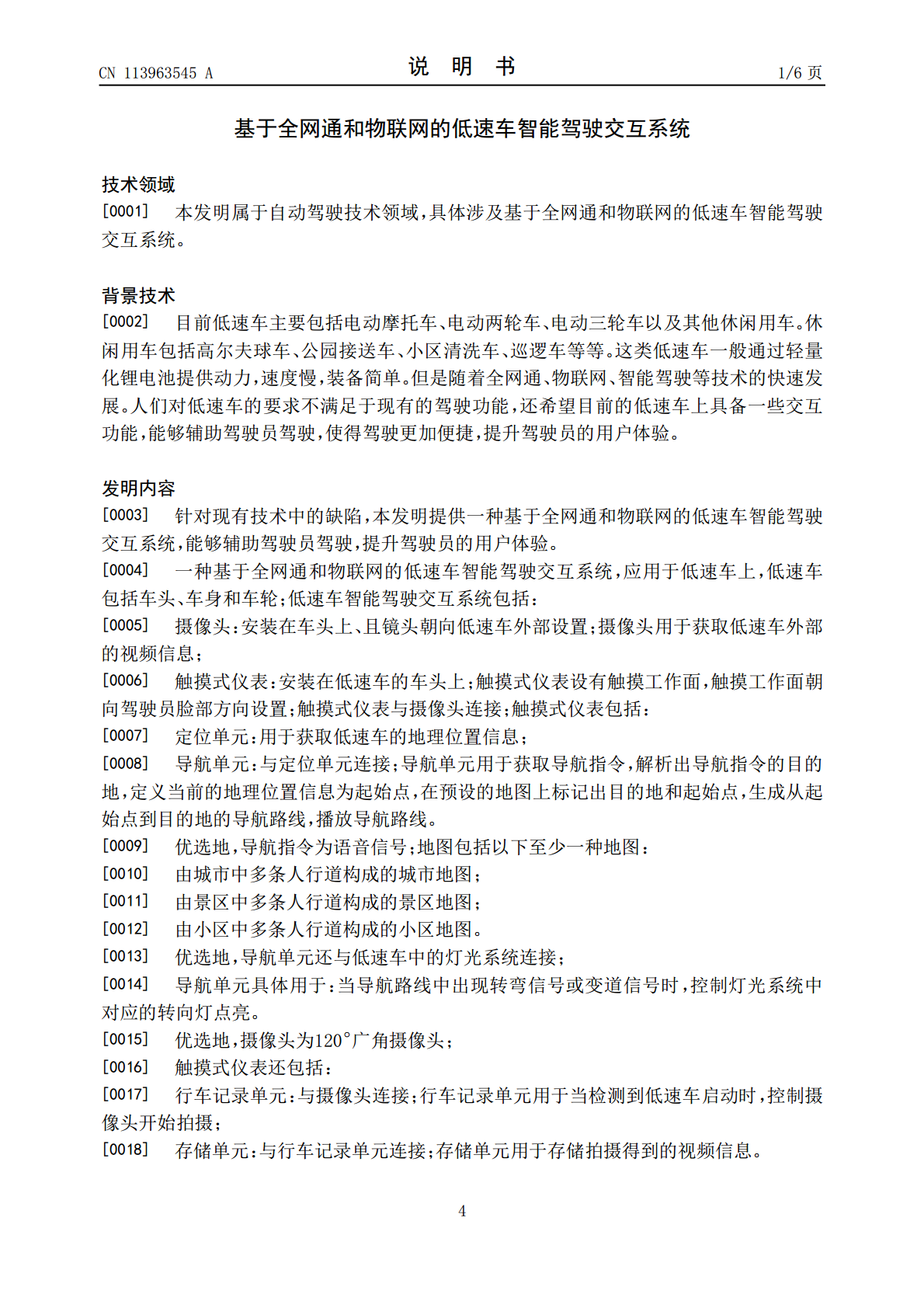
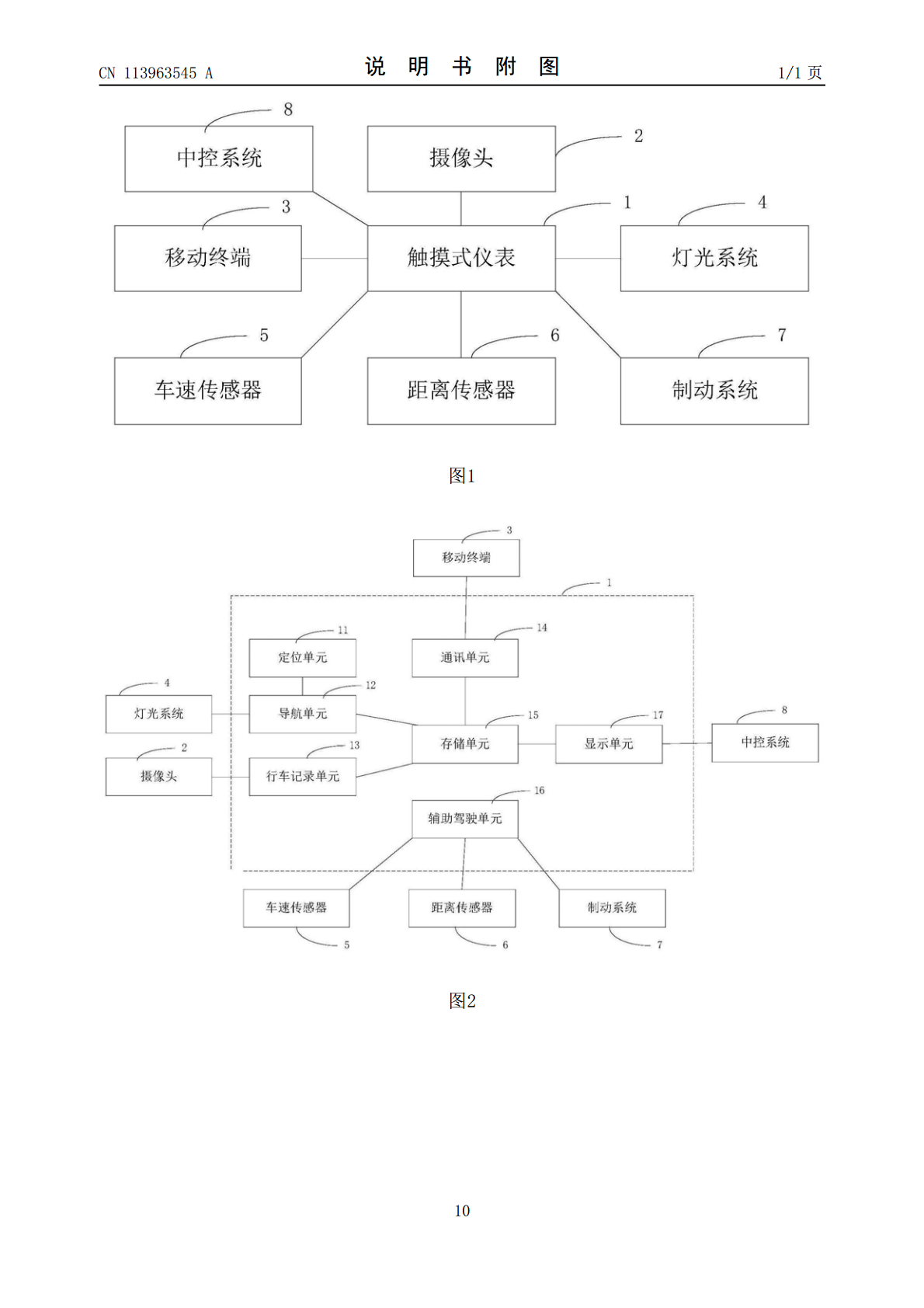
本发明提供的基于全网通和物联网的低速车智能驾驶交互系统,包括:摄像头用于获取低速车外部的视频信息;触摸式仪表:安装在低速车的车头上;触摸式仪表设有触摸工作面,触摸工作面朝向驾驶员脸部方向设置;触摸式仪表与摄像头连接;触摸式仪表包括:定位单元:用于获取低速车的地理位置信息;导航单元:与定位单元连接;导航单元用于获取导航指令,解析出导航指令的目的地,定义当前的地理位置信息为起始点,在预设的地图上标记出目的地和起始点,生成从起始点到目的地的导航路线,播放导航路线。该系统利用物联网和导航技术提供了适用于低速车的交

基于物联网的无人驾驶智能公交车系统设计.pptx
基于物联网的无人驾驶智能公交车系统设计目录添加章节标题系统概述定义与目标关键技术系统架构物联网技术应用传感器网络数据传输云计算平台大数据分析无人驾驶技术实现自动驾驶算法车辆定位与导航安全控制策略人机交互界面智能公交服务优化乘客信息系统调度与路线规划能源管理车辆维护与故障诊断系统安全与可靠性网络安全防护数据加密与隐私保护故障容错与恢复机制安全审计与监控实践案例与效果评估国内外应用现状实际运行效果分析技术创新与改进空间社会经济效益评估THANKYOU
基于物联网交互和智能通信的信息处理方法、系统及平台.pdf
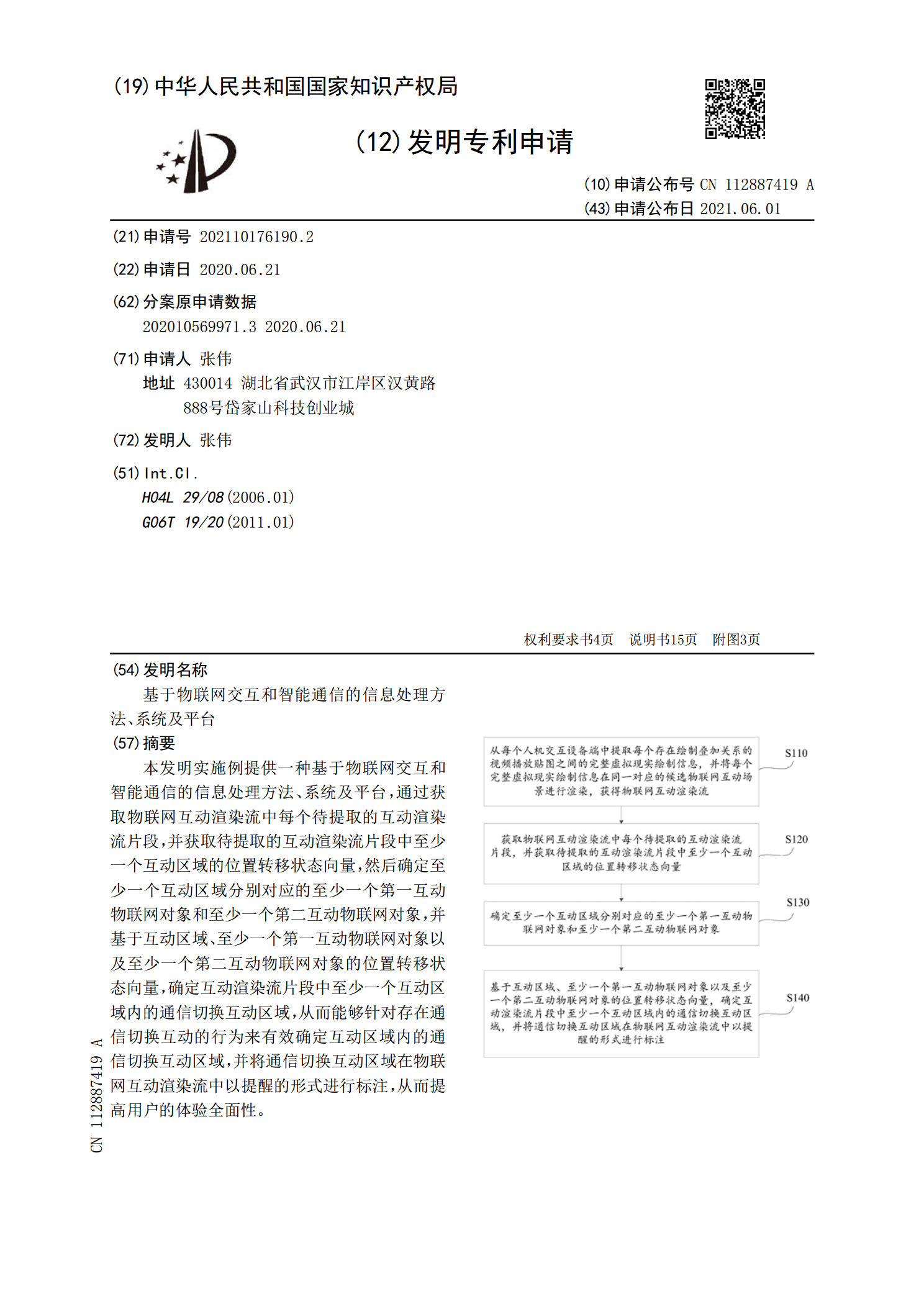
本发明实施例提供一种基于物联网交互和智能通信的信息处理方法、系统及平台,通过获取物联网互动渲染流中每个待提取的互动渲染流片段,并获取待提取的互动渲染流片段中至少一个互动区域的位置转移状态向量,然后确定至少一个互动区域分别对应的至少一个第一互动物联网对象和至少一个第二互动物联网对象,并基于互动区域、至少一个第一互动物联网对象以及至少一个第二互动物联网对象的位置转移状态向量,确定互动渲染流片段中至少一个互动区域内的通信切换互动区域,从而能够针对存在通信切换互动的行为来有效确定互动区域内的通信切换互动区域,并将
基于物联网交互和智能通信的信息处理方法及系统.pdf
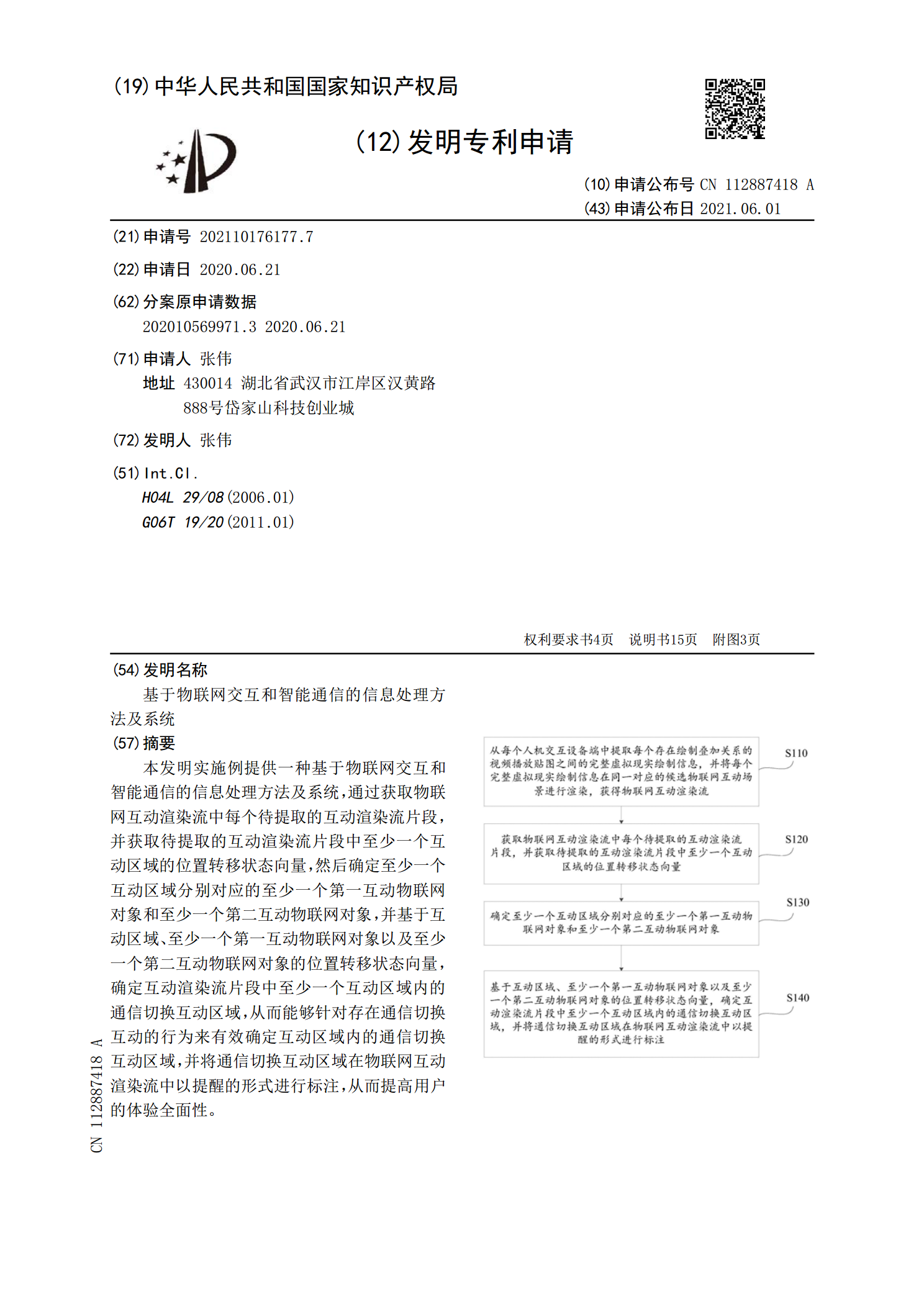
本发明实施例提供一种基于物联网交互和智能通信的信息处理方法及系统,通过获取物联网互动渲染流中每个待提取的互动渲染流片段,并获取待提取的互动渲染流片段中至少一个互动区域的位置转移状态向量,然后确定至少一个互动区域分别对应的至少一个第一互动物联网对象和至少一个第二互动物联网对象,并基于互动区域、至少一个第一互动物联网对象以及至少一个第二互动物联网对象的位置转移状态向量,确定互动渲染流片段中至少一个互动区域内的通信切换互动区域,从而能够针对存在通信切换互动的行为来有效确定互动区域内的通信切换互动区域,并将通信切
一种基于物联网通信协议的智能缝制系统.pdf
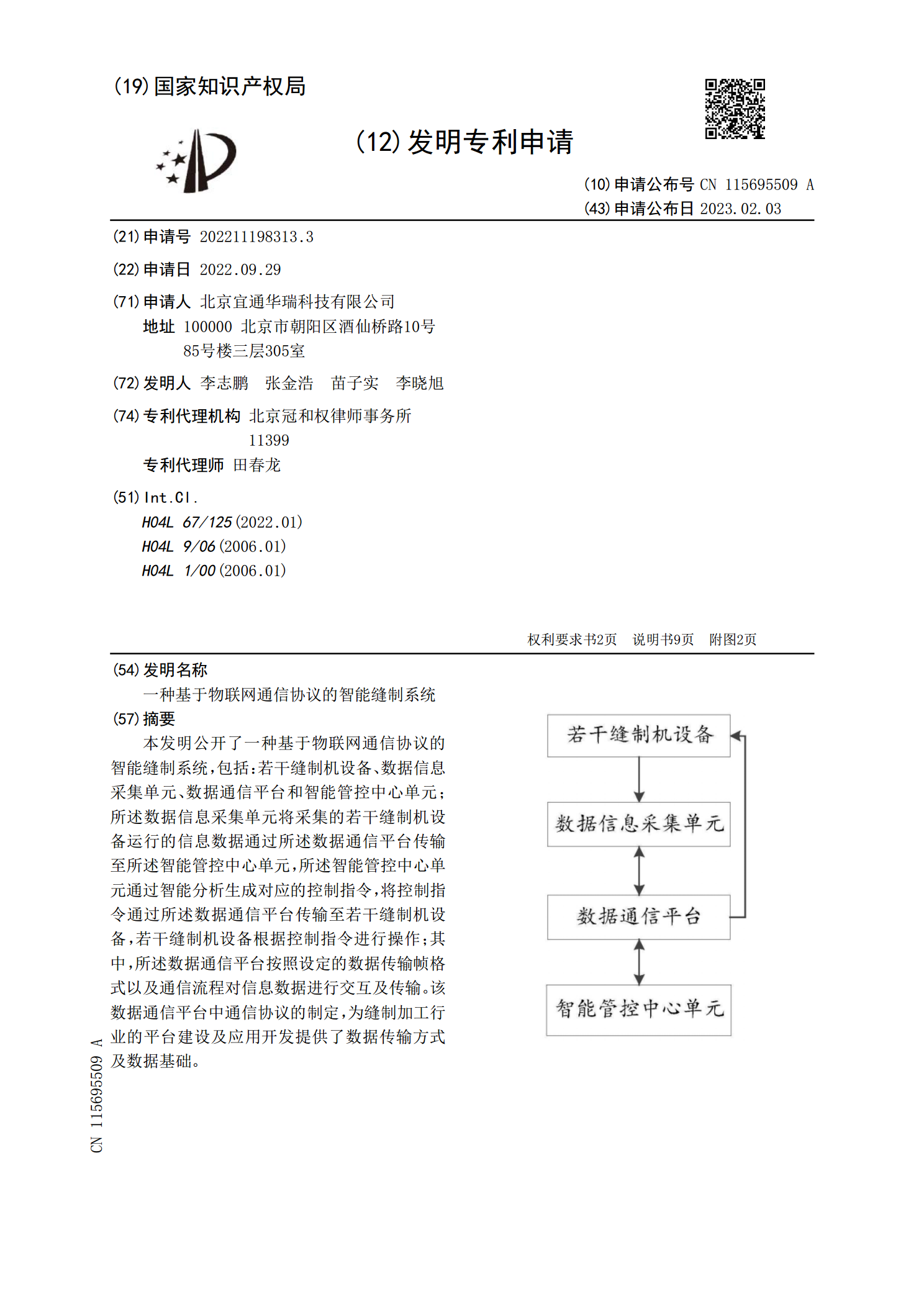
本发明公开了一种基于物联网通信协议的智能缝制系统,包括:若干缝制机设备、数据信息采集单元、数据通信平台和智能管控中心单元;所述数据信息采集单元将采集的若干缝制机设备运行的信息数据通过所述数据通信平台传输至所述智能管控中心单元,所述智能管控中心单元通过智能分析生成对应的控制指令,将控制指令通过所述数据通信平台传输至若干缝制机设备,若干缝制机设备根据控制指令进行操作;其中,所述数据通信平台按照设定的数据传输帧格式以及通信流程对信息数据进行交互及传输。该数据通信平台中通信协议的制定,为缝制加工行业的平台建设及应