
盾构管片变形监测系统及其监测方法.pdf

Th****84

1/10
2/10
3/10
4/10
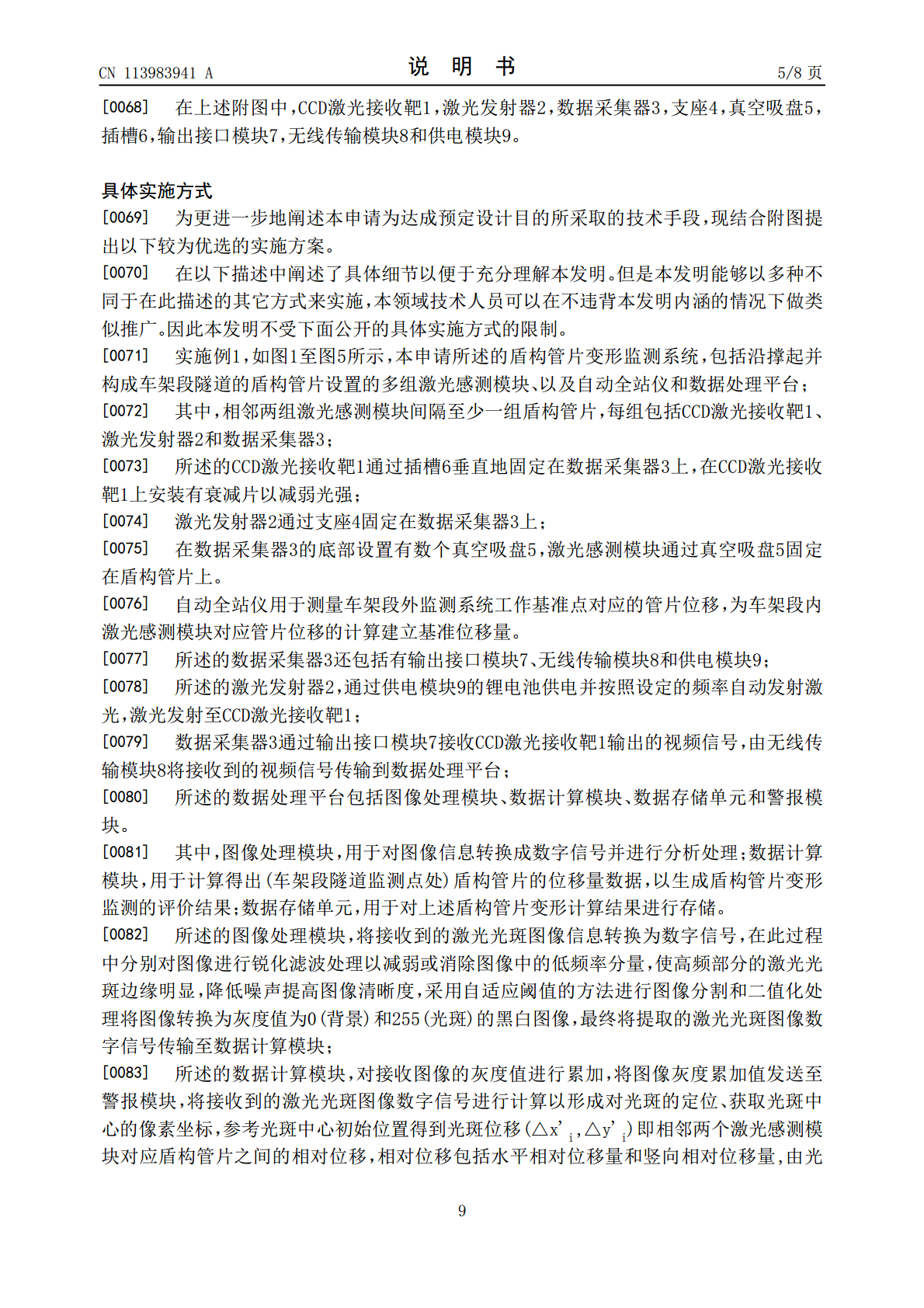
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
盾构管片变形监测系统及其监测方法.pdf
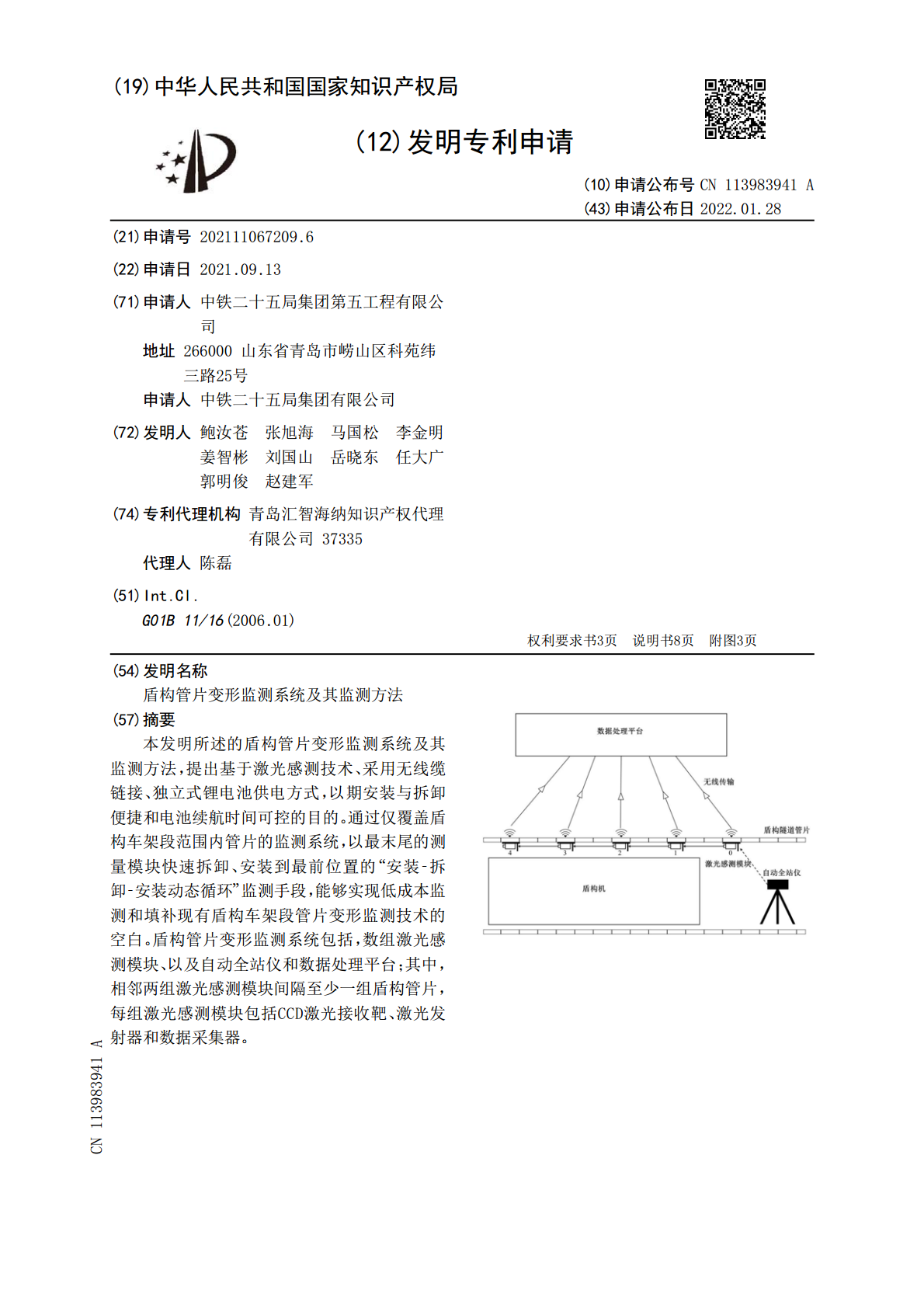
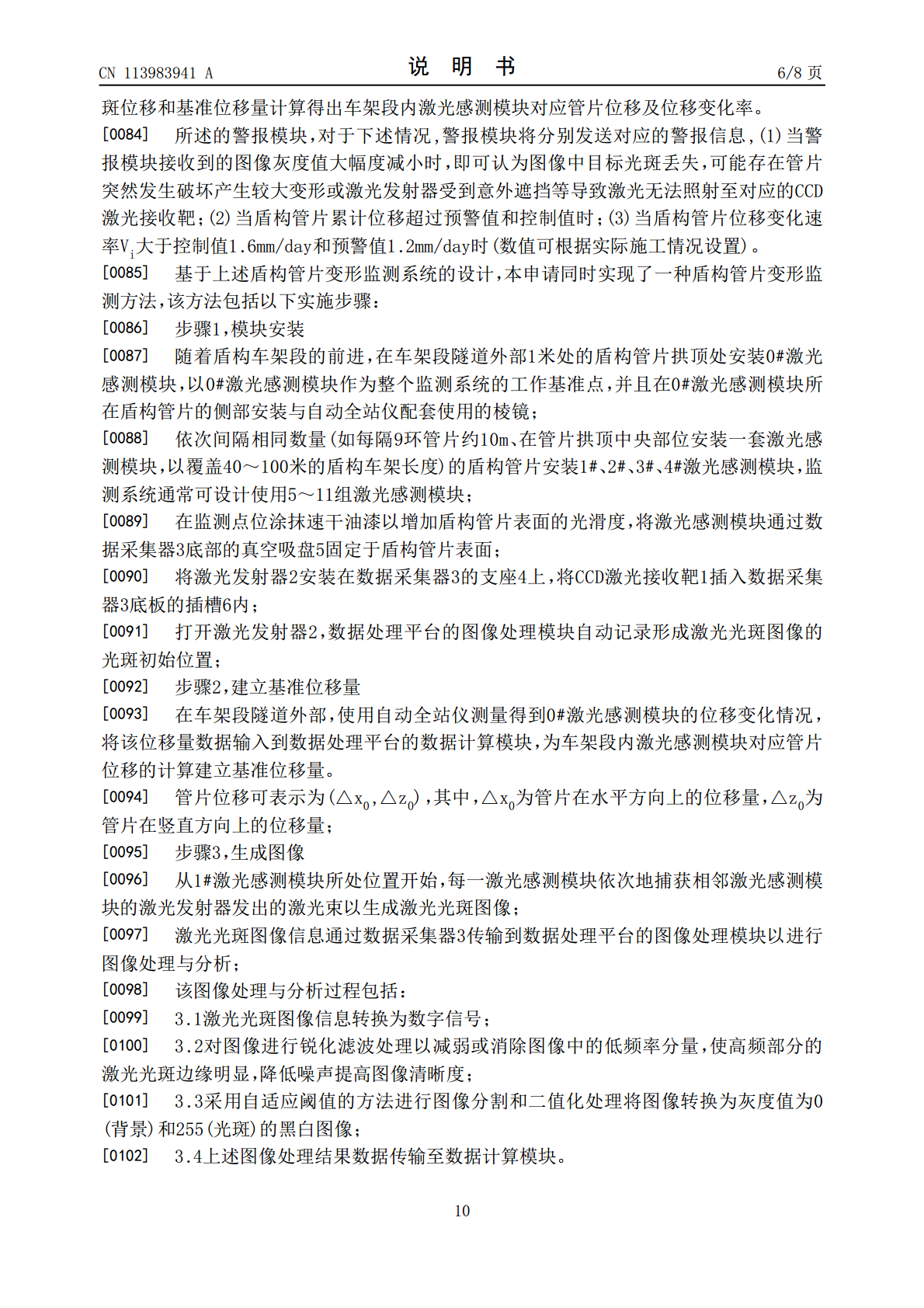
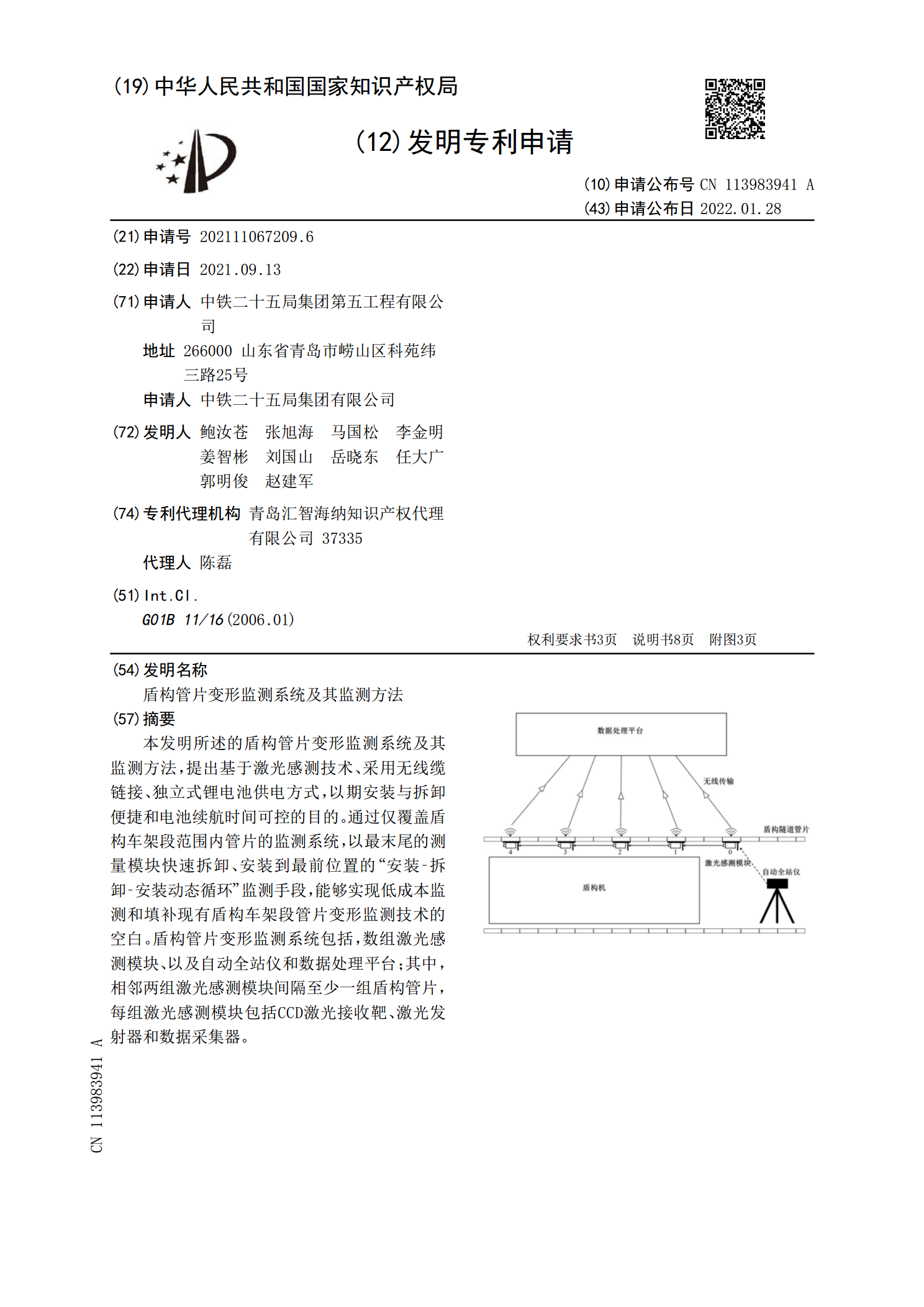
本发明所述的盾构管片变形监测系统及其监测方法,提出基于激光感测技术、采用无线缆链接、独立式锂电池供电方式,以期安装与拆卸便捷和电池续航时间可控的目的。通过仅覆盖盾构车架段范围内管片的监测系统,以最末尾的测量模块快速拆卸、安装到最前位置的“安装‑拆卸‑安装动态循环”监测手段,能够实现低成本监测和填补现有盾构车架段管片变形监测技术的空白。盾构管片变形监测系统包括,数组激光感测模块、以及自动全站仪和数据处理平台;其中,相邻两组激光感测模块间隔至少一组盾构管片,每组激光感测模块包括CCD激光接收靶、激光发射器和数
盾构隧道管片错位变形自动监测预警装置、系统及方法.pdf
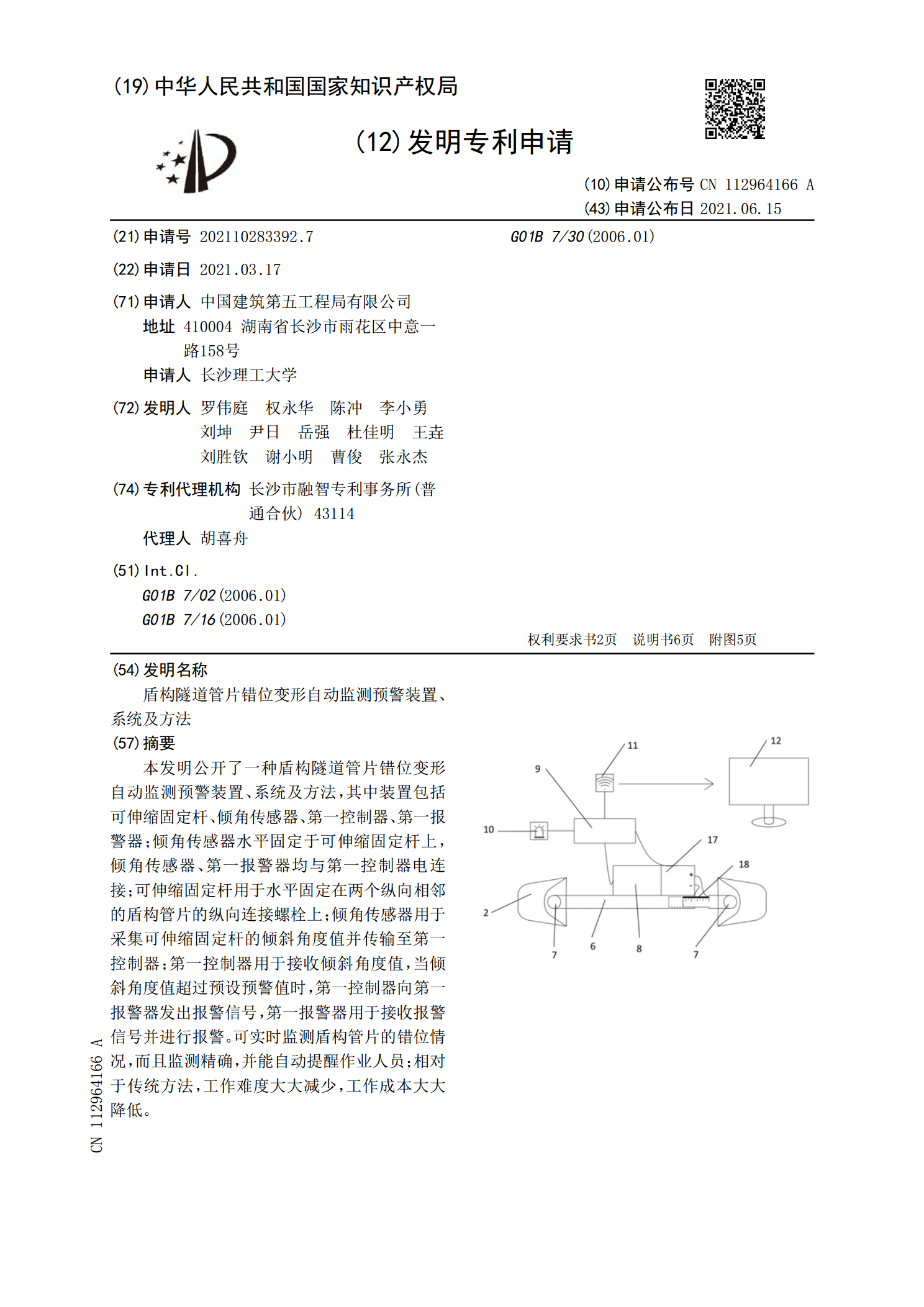
本发明公开了一种盾构隧道管片错位变形自动监测预警装置、系统及方法,其中装置包括可伸缩固定杆、倾角传感器、第一控制器、第一报警器;倾角传感器水平固定于可伸缩固定杆上,倾角传感器、第一报警器均与第一控制器电连接;可伸缩固定杆用于水平固定在两个纵向相邻的盾构管片的纵向连接螺栓上;倾角传感器用于采集可伸缩固定杆的倾斜角度值并传输至第一控制器;第一控制器用于接收倾斜角度值,当倾斜角度值超过预设预警值时,第一控制器向第一报警器发出报警信号,第一报警器用于接收报警信号并进行报警。可实时监测盾构管片的错位情况,而且监测精
一种盾构隧道扭转变形监测系统及其方法.pdf
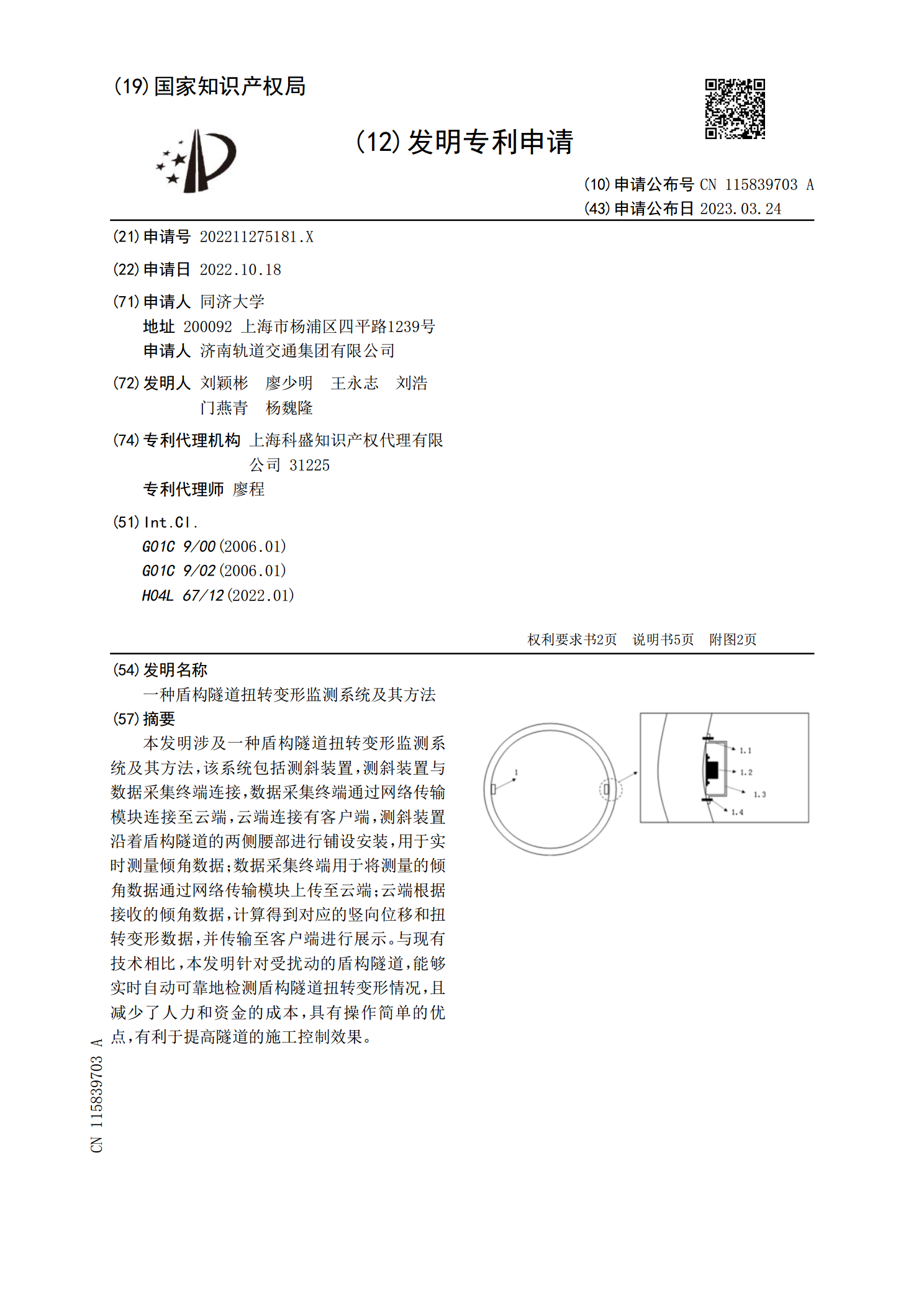
本发明涉及一种盾构隧道扭转变形监测系统及其方法,该系统包括测斜装置,测斜装置与数据采集终端连接,数据采集终端通过网络传输模块连接至云端,云端连接有客户端,测斜装置沿着盾构隧道的两侧腰部进行铺设安装,用于实时测量倾角数据;数据采集终端用于将测量的倾角数据通过网络传输模块上传至云端;云端根据接收的倾角数据,计算得到对应的竖向位移和扭转变形数据,并传输至客户端进行展示。与现有技术相比,本发明针对受扰动的盾构隧道,能够实时自动可靠地检测盾构隧道扭转变形情况,且减少了人力和资金的成本,具有操作简单的优点,有利于提高
地铁盾构隧道管片接头渗水自动监测与识别方法及系统.pdf
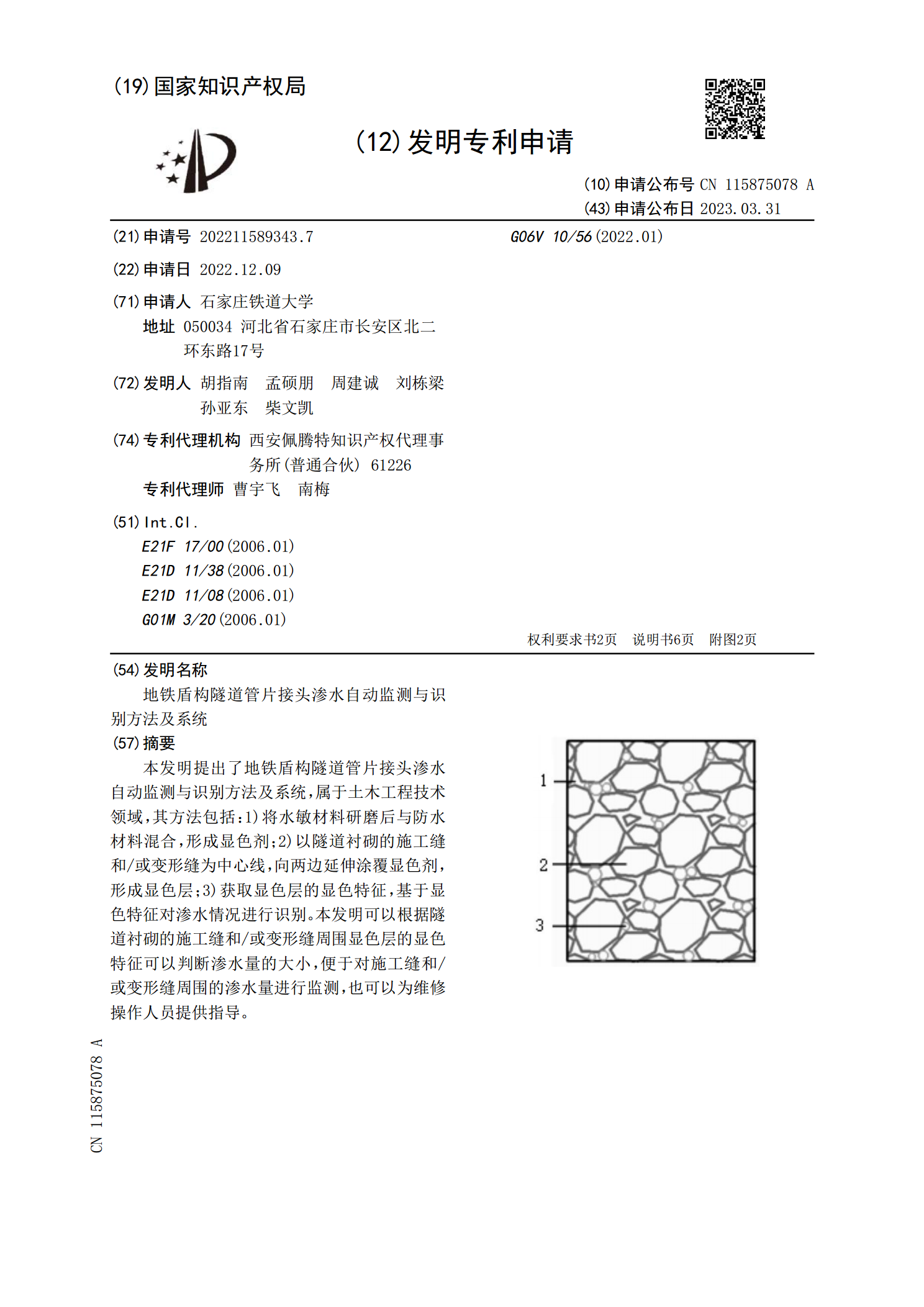
本发明提出了地铁盾构隧道管片接头渗水自动监测与识别方法及系统,属于土木工程技术领域,其方法包括:1)将水敏材料研磨后与防水材料混合,形成显色剂;2)以隧道衬砌的施工缝和/或变形缝为中心线,向两边延伸涂覆显色剂,形成显色层;3)获取显色层的显色特征,基于显色特征对渗水情况进行识别。本发明可以根据隧道衬砌的施工缝和/或变形缝周围显色层的显色特征可以判断渗水量的大小,便于对施工缝和/或变形缝周围的渗水量进行监测,也可以为维修操作人员提供指导。
一种在建隧道盾构机车架段的实时变形监测方法及其系统.pdf
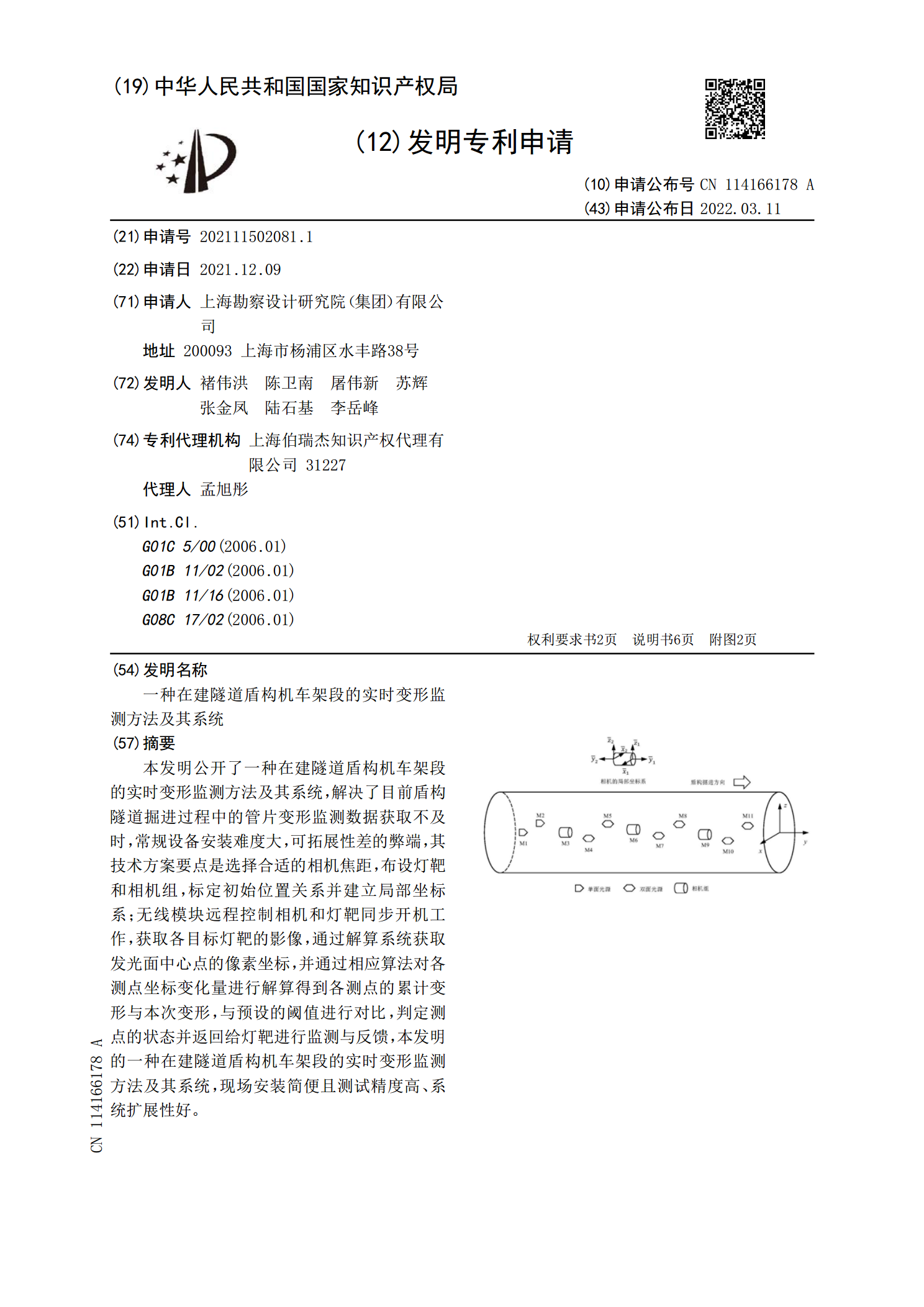
本发明公开了一种在建隧道盾构机车架段的实时变形监测方法及其系统,解决了目前盾构隧道掘进过程中的管片变形监测数据获取不及时,常规设备安装难度大,可拓展性差的弊端,其技术方案要点是选择合适的相机焦距,布设灯靶和相机组,标定初始位置关系并建立局部坐标系;无线模块远程控制相机和灯靶同步开机工作,获取各目标灯靶的影像,通过解算系统获取发光面中心点的像素坐标,并通过相应算法对各测点坐标变化量进行解算得到各测点的累计变形与本次变形,与预设的阈值进行对比,判定测点的状态并返回给灯靶进行监测与反馈,本发明的一种在建隧道盾构