
基于加权低秩和邻域组稀疏分解的运动目标检测方法.pdf

St****36

1/10
2/10
3/10
4/10

5/10

6/10
7/10
8/10
9/10
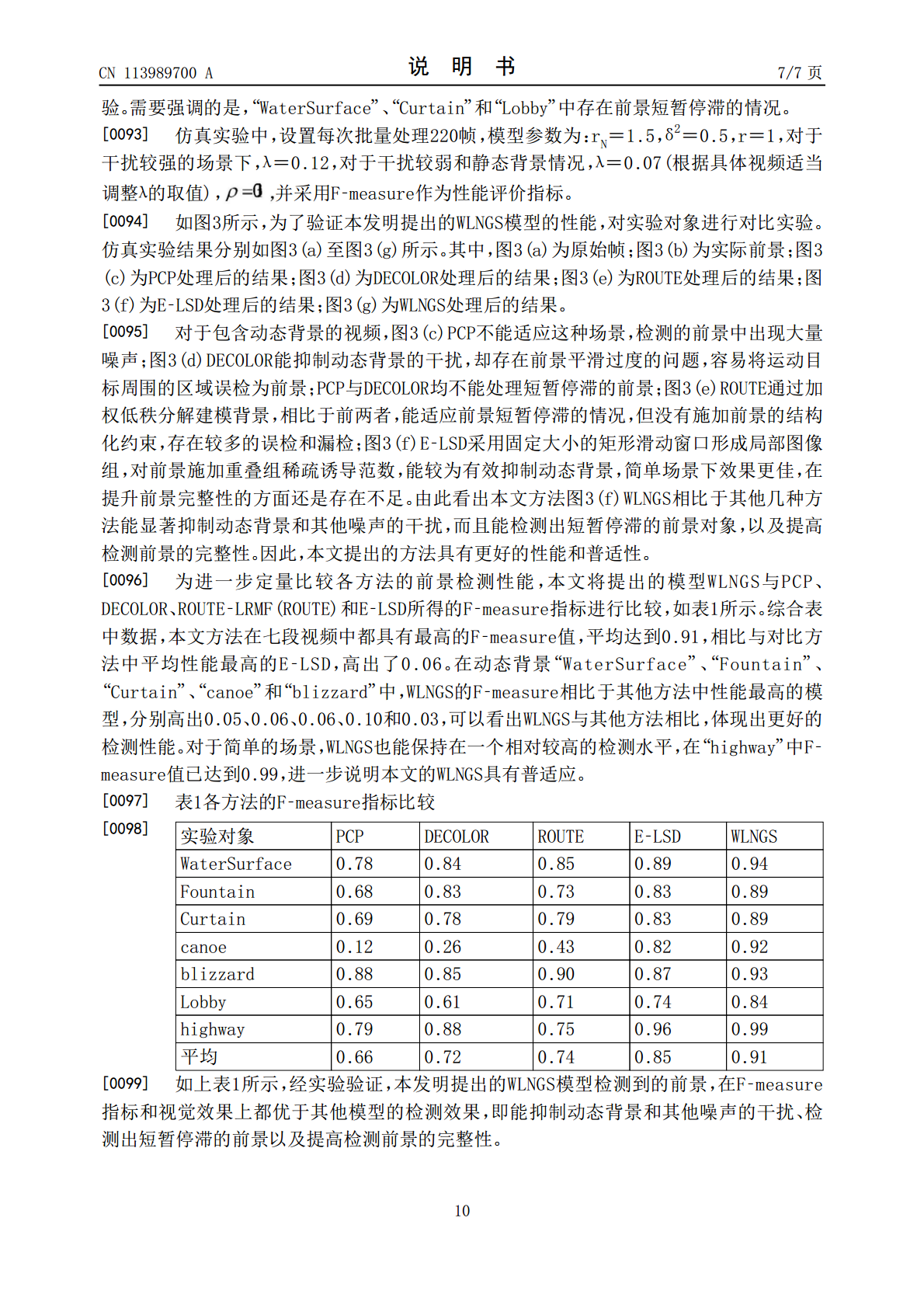
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于加权低秩和邻域组稀疏分解的运动目标检测方法.pdf
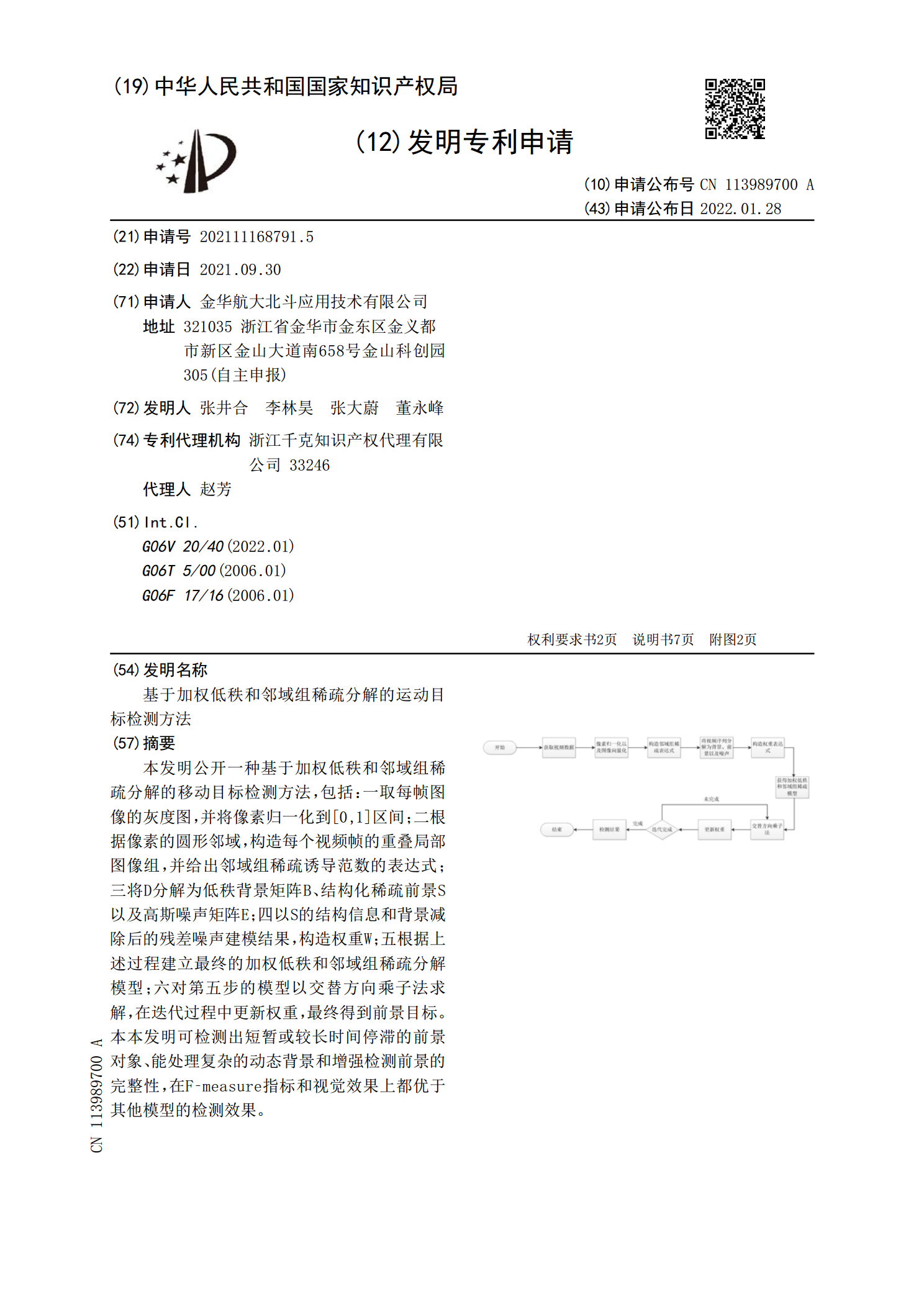
本发明公开一种基于加权低秩和邻域组稀疏分解的移动目标检测方法,包括:一取每帧图像的灰度图,并将像素归一化到[0,1]区间;二根据像素的圆形邻域,构造每个视频帧的重叠局部图像组,并给出邻域组稀疏诱导范数的表达式;三将D分解为低秩背景矩阵B、结构化稀疏前景S以及高斯噪声矩阵E;四以S的结构信息和背景减除后的残差噪声建模结果,构造权重W;五根据上述过程建立最终的加权低秩和邻域组稀疏分解模型;六对第五步的模型以交替方向乘子法求解,在迭代过程中更新权重,最终得到前景目标。本本发明可检测出短暂或较长时间停滞的前景对象
基于低秩和非局部自相似的稀疏ISAR成像方法及系统.pdf
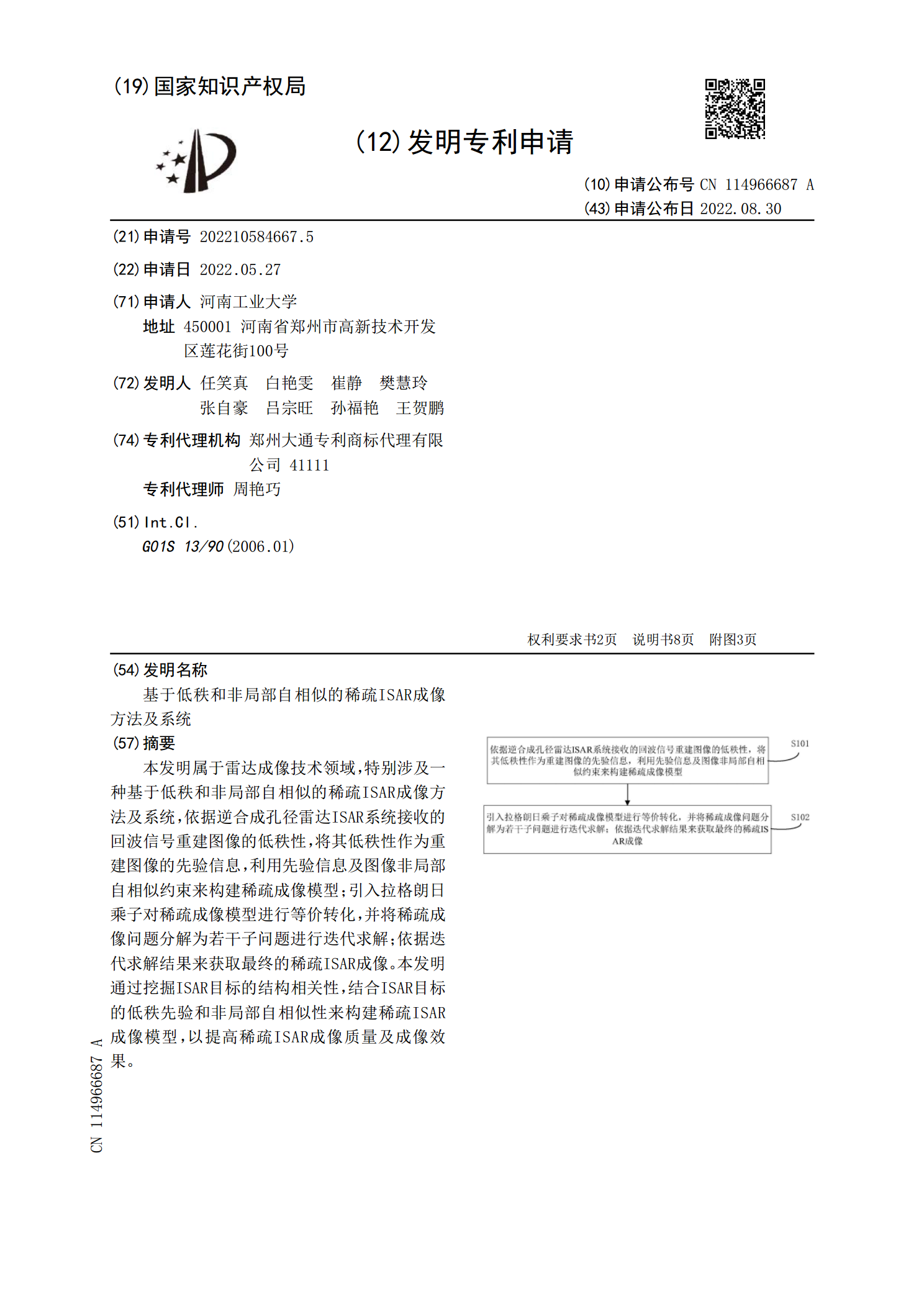
本发明属于雷达成像技术领域,特别涉及一种基于低秩和非局部自相似的稀疏ISAR成像方法及系统,依据逆合成孔径雷达ISAR系统接收的回波信号重建图像的低秩性,将其低秩性作为重建图像的先验信息,利用先验信息及图像非局部自相似约束来构建稀疏成像模型;引入拉格朗日乘子对稀疏成像模型进行等价转化,并将稀疏成像问题分解为若干子问题进行迭代求解;依据迭代求解结果来获取最终的稀疏ISAR成像。本发明通过挖掘ISAR目标的结构相关性,结合ISAR目标的低秩先验和非局部自相似性来构建稀疏ISAR成像模型,以提高稀疏ISAR成像
基于稀疏分解与邻域蜂群算法的电机故障诊断方法.pdf
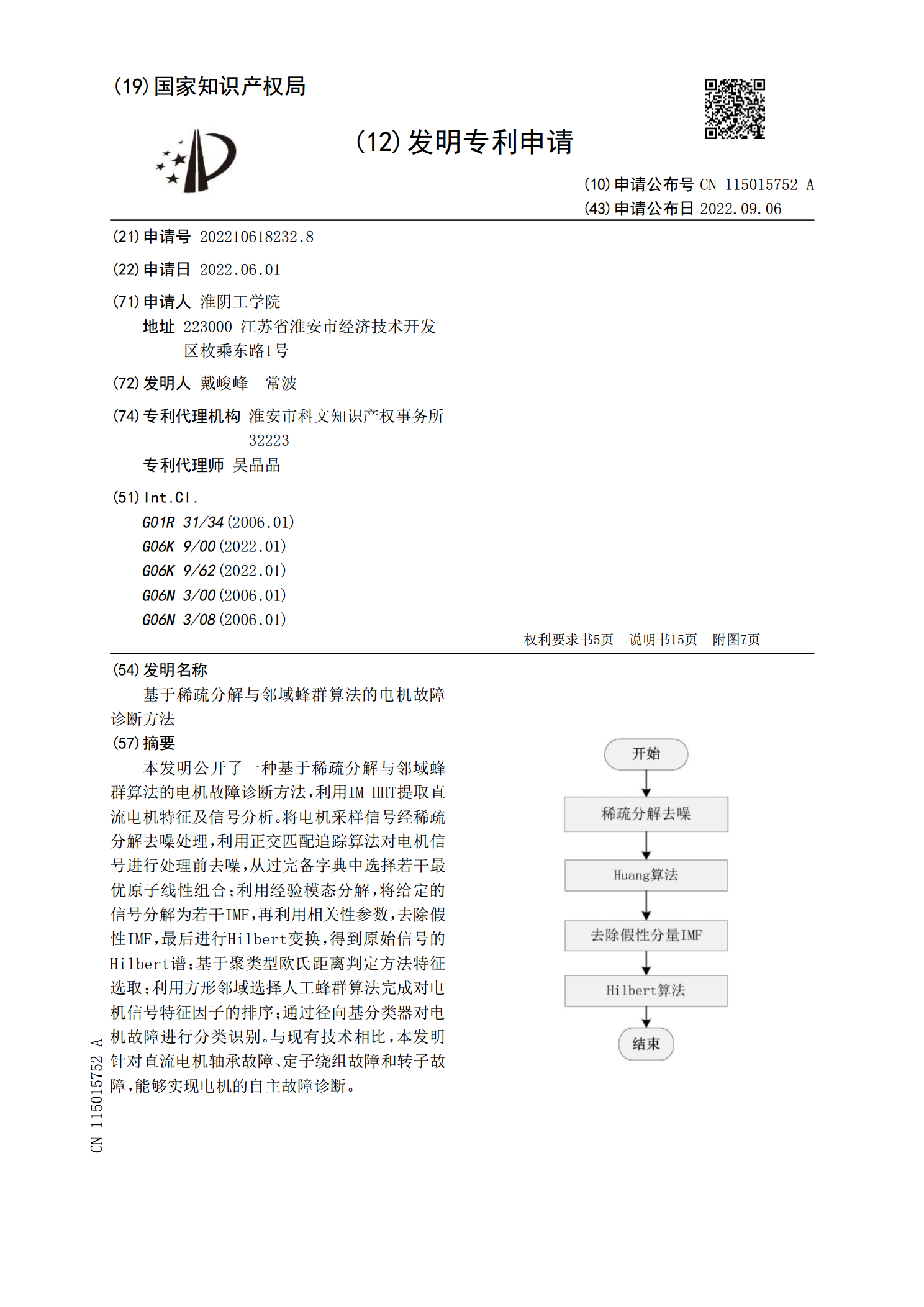
本发明公开了一种基于稀疏分解与邻域蜂群算法的电机故障诊断方法,利用IM‑HHT提取直流电机特征及信号分析。将电机采样信号经稀疏分解去噪处理,利用正交匹配追踪算法对电机信号进行处理前去噪,从过完备字典中选择若干最优原子线性组合;利用经验模态分解,将给定的信号分解为若干IMF,再利用相关性参数,去除假性IMF,最后进行Hilbert变换,得到原始信号的Hilbert谱;基于聚类型欧氏距离判定方法特征选取;利用方形邻域选择人工蜂群算法完成对电机信号特征因子的排序;通过径向基分类器对电机故障进行分类识别。与现有技
一种鲁棒的低秩稀疏分解的运动目标检测方法.pdf
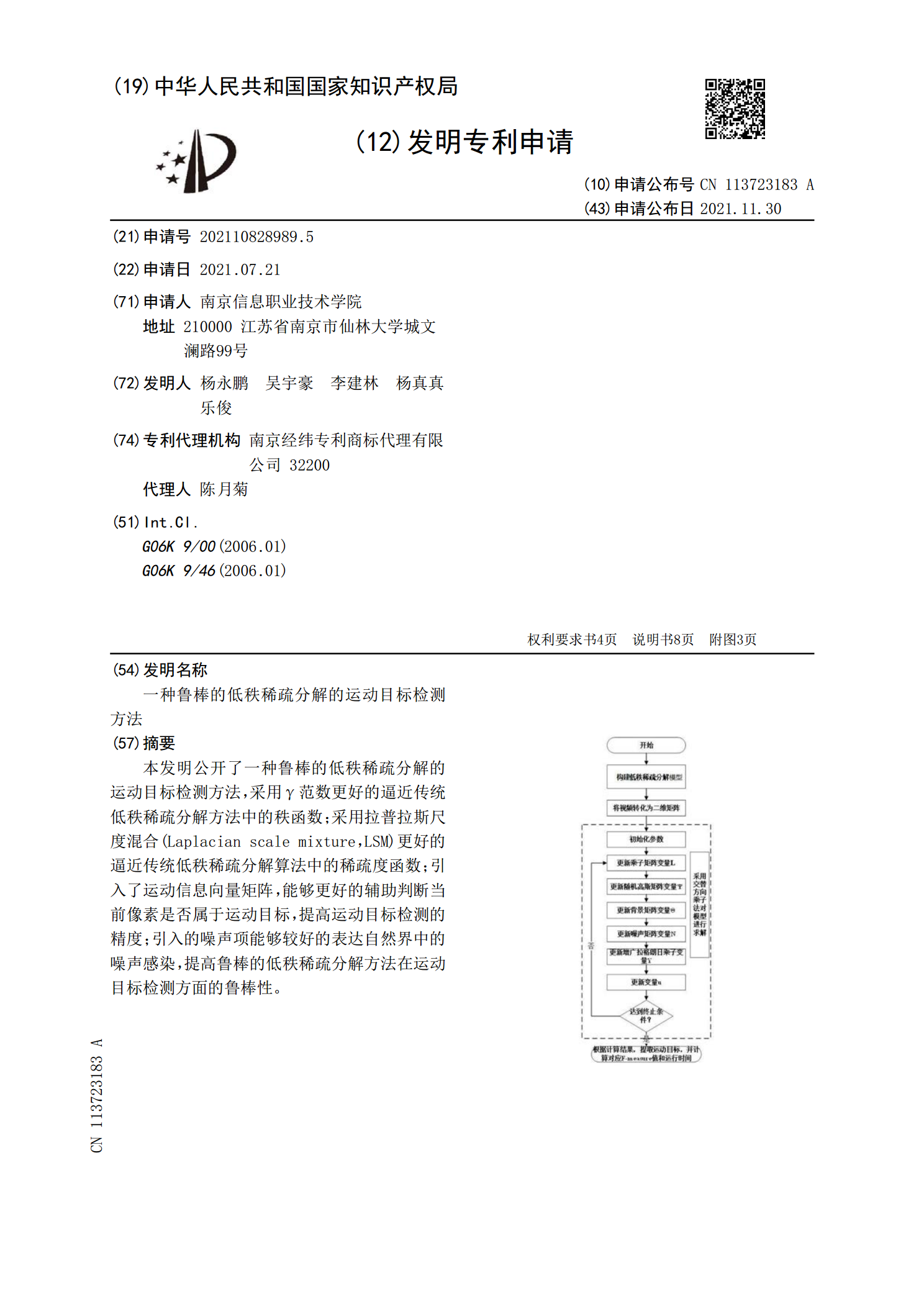
本发明公开了一种鲁棒的低秩稀疏分解的运动目标检测方法,采用γ范数更好的逼近传统低秩稀疏分解方法中的秩函数;采用拉普拉斯尺度混合(Laplacianscalemixture,LSM)更好的逼近传统低秩稀疏分解算法中的稀疏度函数;引入了运动信息向量矩阵,能够更好的辅助判断当前像素是否属于运动目标,提高运动目标检测的精度;引入的噪声项能够较好的表达自然界中的噪声感染,提高鲁棒的低秩稀疏分解方法在运动目标检测方面的鲁棒性。

基于低秩稀疏分解和PCNN的图像融合方法.pdf
本发明提出了一种基于图像低秩与稀疏成分分解和PCNN相结合的图像融合方法。首先在低秩分解的基础上,结合稀疏表示,通过不同的字典,对不同成分进行稀疏表达得到对应成分的编码系数。然后在融合过程中,采用一种“绝对值”取大的策略对低秩成分进行融合,以保留源图像的亮度信息;对于稀疏成分,不同于传统的融合策略,本发明采用梯度特征激励PCNN的方法进行融合,能更大程度保留更多的源图像边缘细节信息。最后,将低秩融合部分和稀疏部分相加,便得到最终的融合结果。针对不同类型的图像,本发明提出的方法无论在视觉效果还是客观指标上,