
基于大数据和智慧医疗的医疗垃圾管理系统.pdf

a是****澜吖

1/10
2/10

3/10
4/10

5/10
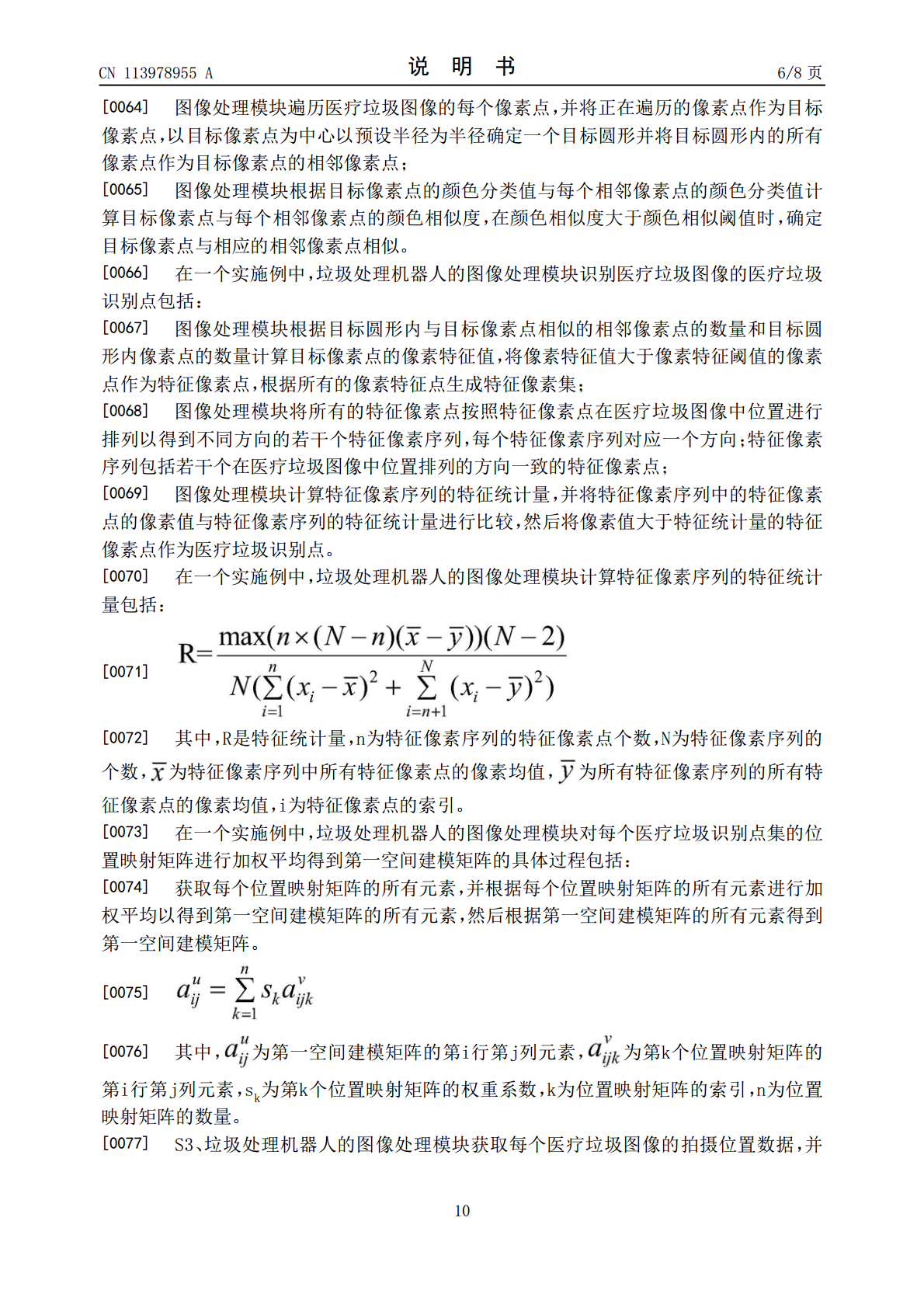
6/10

7/10

8/10

9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于大数据和智慧医疗的医疗垃圾管理系统.pdf
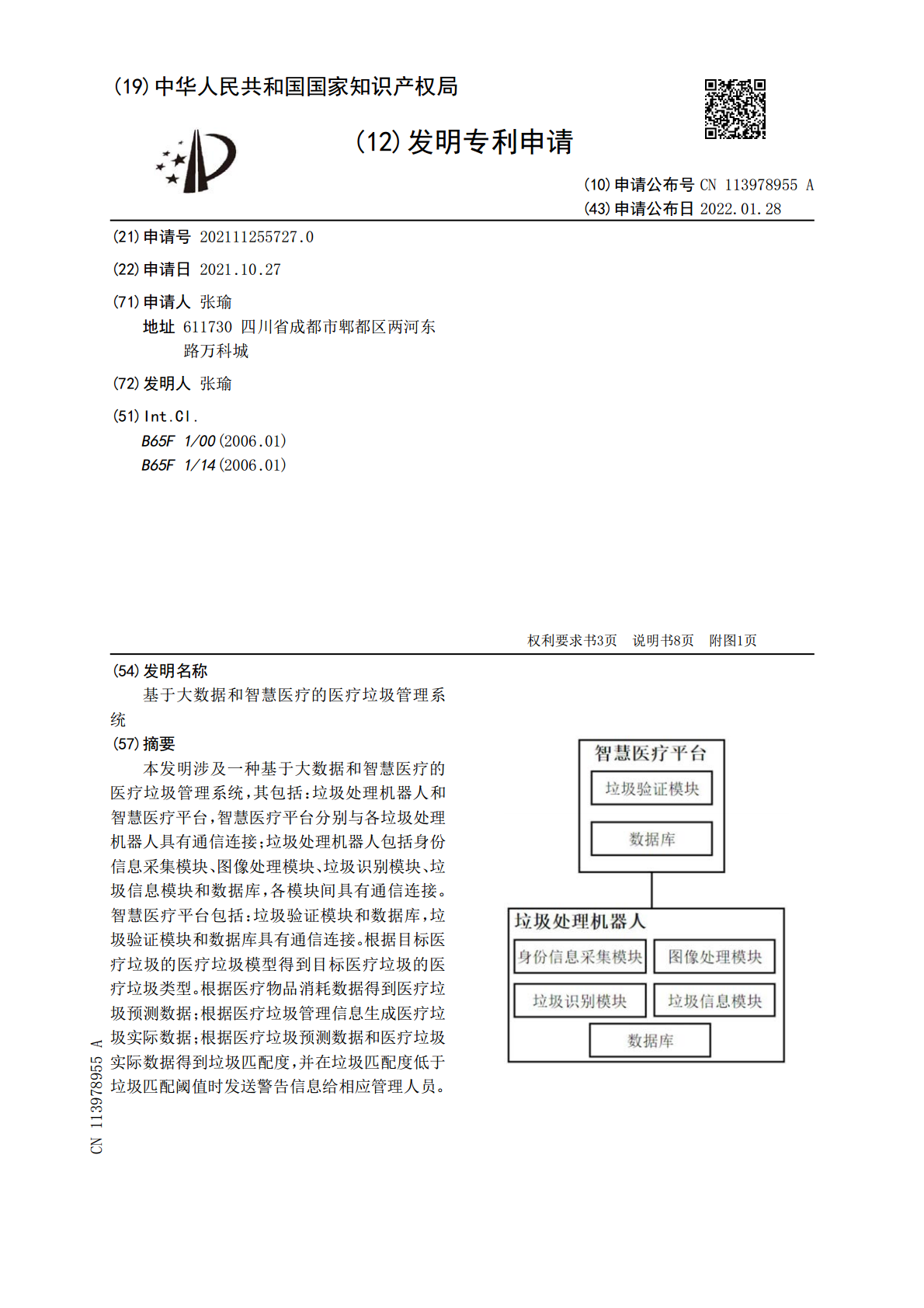
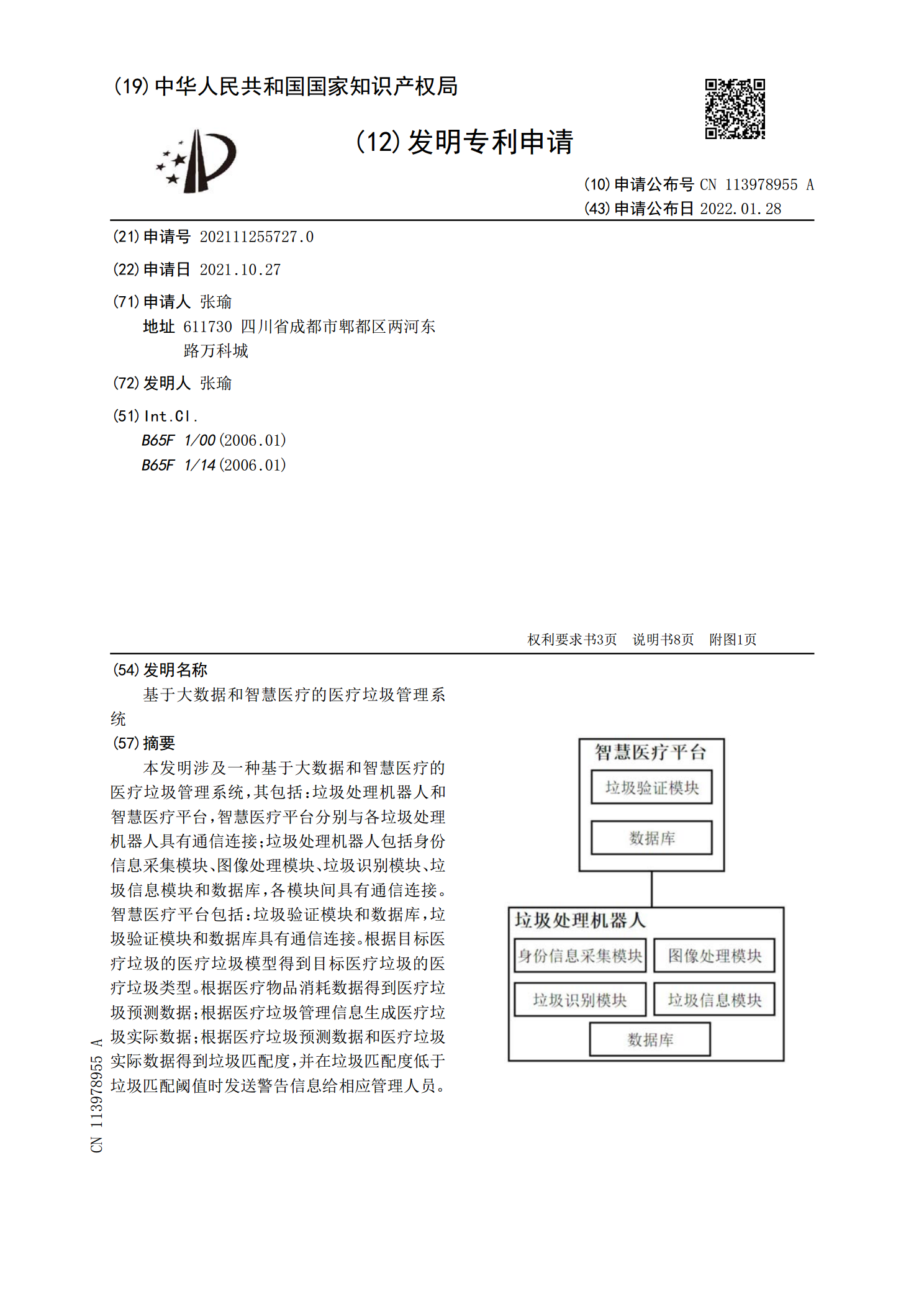
本发明涉及一种基于大数据和智慧医疗的医疗垃圾管理系统,其包括:垃圾处理机器人和智慧医疗平台,智慧医疗平台分别与各垃圾处理机器人具有通信连接;垃圾处理机器人包括身份信息采集模块、图像处理模块、垃圾识别模块、垃圾信息模块和数据库,各模块间具有通信连接。智慧医疗平台包括:垃圾验证模块和数据库,垃圾验证模块和数据库具有通信连接。根据目标医疗垃圾的医疗垃圾模型得到目标医疗垃圾的医疗垃圾类型。根据医疗物品消耗数据得到医疗垃圾预测数据;根据医疗垃圾管理信息生成医疗垃圾实际数据;根据医疗垃圾预测数据和医疗垃圾实际数据得到

基于大数据的智慧医疗行为分析方法及智慧医疗AI系统.pdf
本申请实施例提供一种基于大数据的智慧医疗行为分析方法及智慧医疗AI系统,通过将目标智慧医疗行为数据配置到目标医疗行为分析网络,获得目标医疗行为分析网络生成的兴趣点分布信息,依据兴趣点分布信息,生成对应的兴趣点热力图,根据兴趣点热力图为智慧医疗注册平台生成对应的医疗推送数据,并根据医疗推送数据关联的互动传播数据,确定医疗业务推广请求关联的目标推广医疗业务的推广画像信息。如此,通过基于兴趣点挖掘进行信息推送后进一步评估推广画像信息,进而确定目标推广医疗业务的业务内容传播效果,可以便于针对性对目标推广医疗业务进

基于大数据的智慧医疗系统.pdf
本发明公开基于大数据的智慧医疗系统,用于解决如何根据所买药品或者要检查的项目选择最优的医疗机构、如何对患者信息去验证,从而保护患者就诊信息的安全以及如何对挂号的预约者相互之间实现换号;包括医疗数据采集模块、医疗数据库、处理器、推荐模块、预约挂号模块、换号模块、智能终端模块和定位采集模块;本发明使用者通过智能终端模块输入查询的药品或者需要检查的项目,然后发送至处理器上,处理器将输入查询的药品或者需要检查的项目发送至推荐模块,通过推荐模块进行筛选,获得推荐值最优的医疗机构进行买药或者检查项目;换号模块用于挂号
基于智慧医疗大数据的数据处理方法及系统.pdf
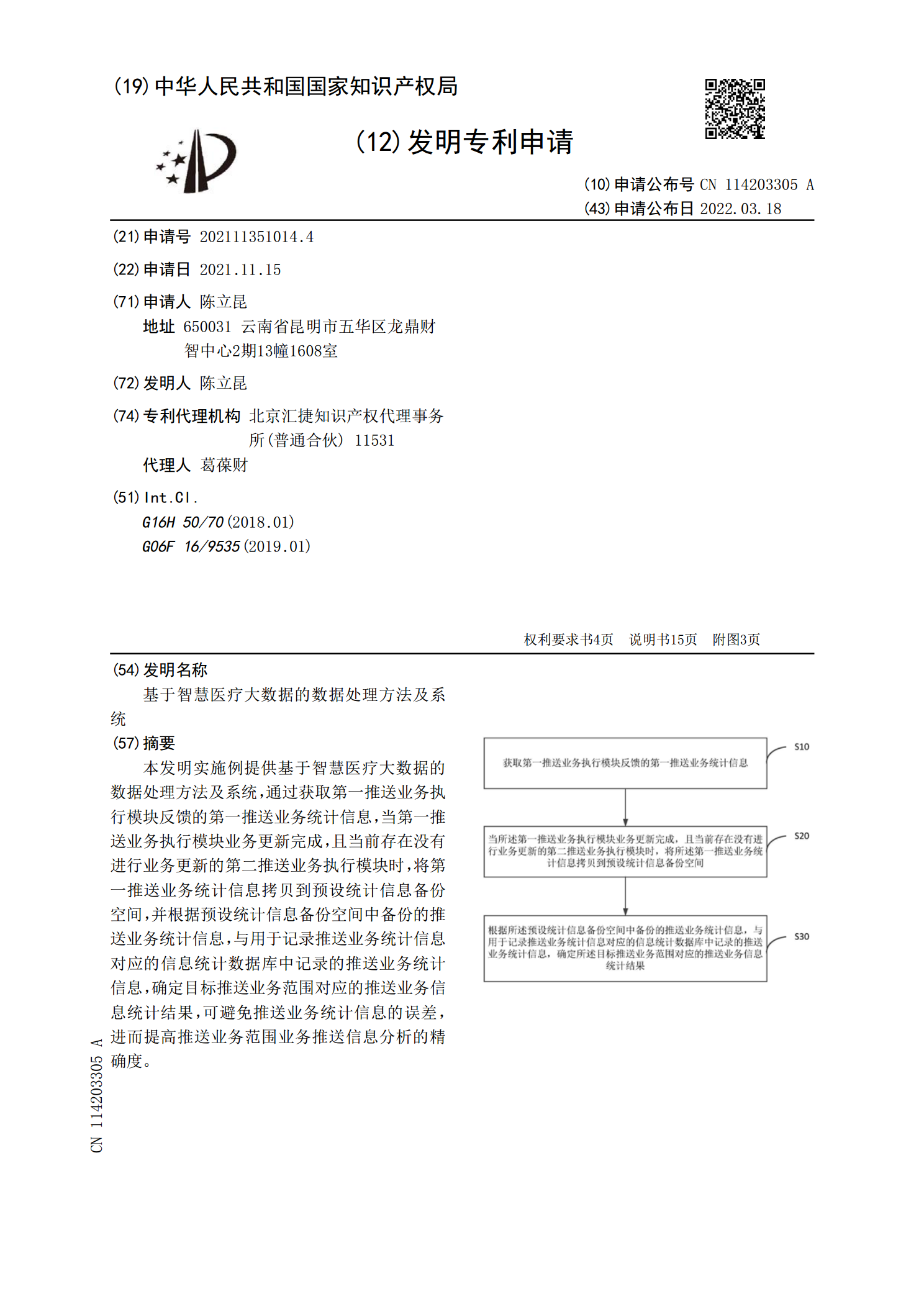
本发明实施例提供基于智慧医疗大数据的数据处理方法及系统,通过获取第一推送业务执行模块反馈的第一推送业务统计信息,当第一推送业务执行模块业务更新完成,且当前存在没有进行业务更新的第二推送业务执行模块时,将第一推送业务统计信息拷贝到预设统计信息备份空间,并根据预设统计信息备份空间中备份的推送业务统计信息,与用于记录推送业务统计信息对应的信息统计数据库中记录的推送业务统计信息,确定目标推送业务范围对应的推送业务信息统计结果,可避免推送业务统计信息的误差,进而提高推送业务范围业务推送信息分析的精确度。

基于大数据下的智慧医疗系统设计.pptx
添加副标题目录PART01PART02智慧医疗系统的定义和功能大数据在智慧医疗系统中的作用智慧医疗系统的应用场景PART03数据采集与处理数据分析与挖掘数据可视化与智能决策系统安全与隐私保护PART04远程医疗诊断与监控个性化医疗方案推荐医疗资源优化配置公共卫生事件预警与防控PART05数据安全与隐私保护的挑战医疗行业标准与法规的完善跨学科人才的培养与引进智慧医疗系统的未来发展趋势感谢您的观看