
基于深度学习的交通灯识别方法.pdf

一吃****昕靓


1/10
2/10

3/10
4/10
5/10

6/10
7/10
8/10
9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于深度学习的交通灯识别方法.pdf
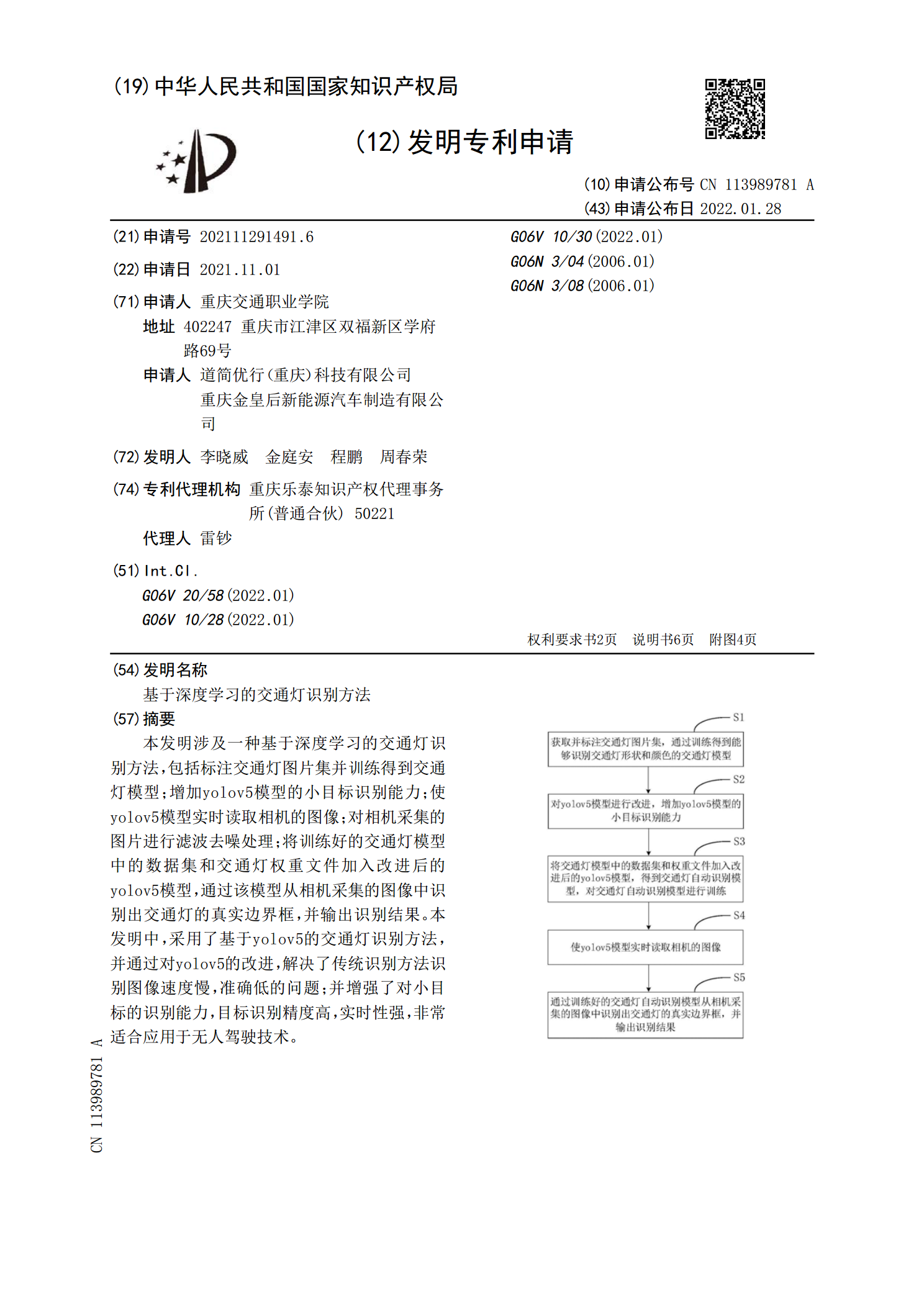
本发明涉及一种基于深度学习的交通灯识别方法,包括标注交通灯图片集并训练得到交通灯模型;增加yolov5模型的小目标识别能力;使yolov5模型实时读取相机的图像;对相机采集的图片进行滤波去噪处理;将训练好的交通灯模型中的数据集和交通灯权重文件加入改进后的yolov5模型,通过该模型从相机采集的图像中识别出交通灯的真实边界框,并输出识别结果。本发明中,采用了基于yolov5的交通灯识别方法,并通过对yolov5的改进,解决了传统识别方法识别图像速度慢,准确低的问题;并增强了对小目标的识别能力,目标识别精度高

基于深度学习的滑坡识别方法.docx
基于深度学习的滑坡识别方法一、研究背景和意义随着全球经济的快速发展,基础设施建设和人类活动不断增加,滑坡现象日益严重。滑坡不仅对人类生活、财产安全造成严重影响,还对生态环境产生破坏。研究滑坡识别方法具有重要的现实意义。滑坡是一种自然灾害,其发生往往伴随着大量的土石流、泥石流等次生灾害,给人们的生命财产安全带来极大的威胁。滑坡的发生通常受到多种因素的影响,如地质条件、气候条件、人为活动等。对滑坡现象的研究具有很高的理论和实践价值。随着深度学习技术的发展,尤其是卷积神经网络(CNN)在图像识别领域的成功应用,

基于深度学习的语音识别方法.pptx
基于深度学习的语音识别方法01添加章节标题深度学习在语音识别中的应用深度学习的基本原理深度学习在语音识别中的重要性深度学习在语音识别中的主要应用场景基于深度学习的语音识别方法分类基于卷积神经网络的语音识别方法基于循环神经网络的语音识别方法基于注意力机制的语音识别方法基于Transformer的语音识别方法深度学习在语音识别中的关键技术特征提取技术模型训练技术序列解码技术模型优化技术基于深度学习的语音识别方法的应用案例语音助手的应用案例智能客服的应用案例语音搜索的应用案例智能家居的应用案例基于深度学习的语音

基于深度学习的牙齿识别方法.docx
基于深度学习的牙齿识别方法基于深度学习的牙齿识别方法摘要:近年来,随着深度学习技术的快速发展,其在图像识别和分类领域取得了显著的成果。牙齿识别作为一种人体生物特征识别方法,可以应用于个人身份验证、犯罪侦查等领域。本文介绍了基于深度学习的牙齿识别方法,并通过实验验证了其有效性和可行性。1.引言牙齿是人体最具个性化和稳定性的特征之一,牙齿识别技术通过对牙齿的形状、排列等特征进行分析和提取,实现对个人身份的验证和识别。传统的牙齿识别方法主要依赖于特征工程和机器学习算法,需要手动提取牙齿相关特征,并训练分类器进行

基于深度学习的步态识别方法.docx
基于深度学习的步态识别方法基于深度学习的步态识别方法摘要:步态识别作为一种生物特征识别的技术,具有广泛的应用前景。本文提出了一种基于深度学习的步态识别方法,该方法利用深度神经网络模型来提取步态特征并进行分类识别。实验结果表明,该方法在步态识别准确率和鲁棒性方面具有较好的性能,可以用于实际应用中的人体认证、健康监测等领域。关键词:步态识别;深度学习;深度神经网络;特征提取;分类识别1.引言步态识别是一种基于人体步行特征进行个体鉴别和行为识别的技术。相比传统的生物特征识别方法如指纹、面部识别等,步态识别具有非