
轨道平顺性的调整方法、装置和计算机可读存储介质.pdf

萌运****魔王

1/10

2/10

3/10

4/10

5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
轨道平顺性的调整方法、装置和计算机可读存储介质.pdf
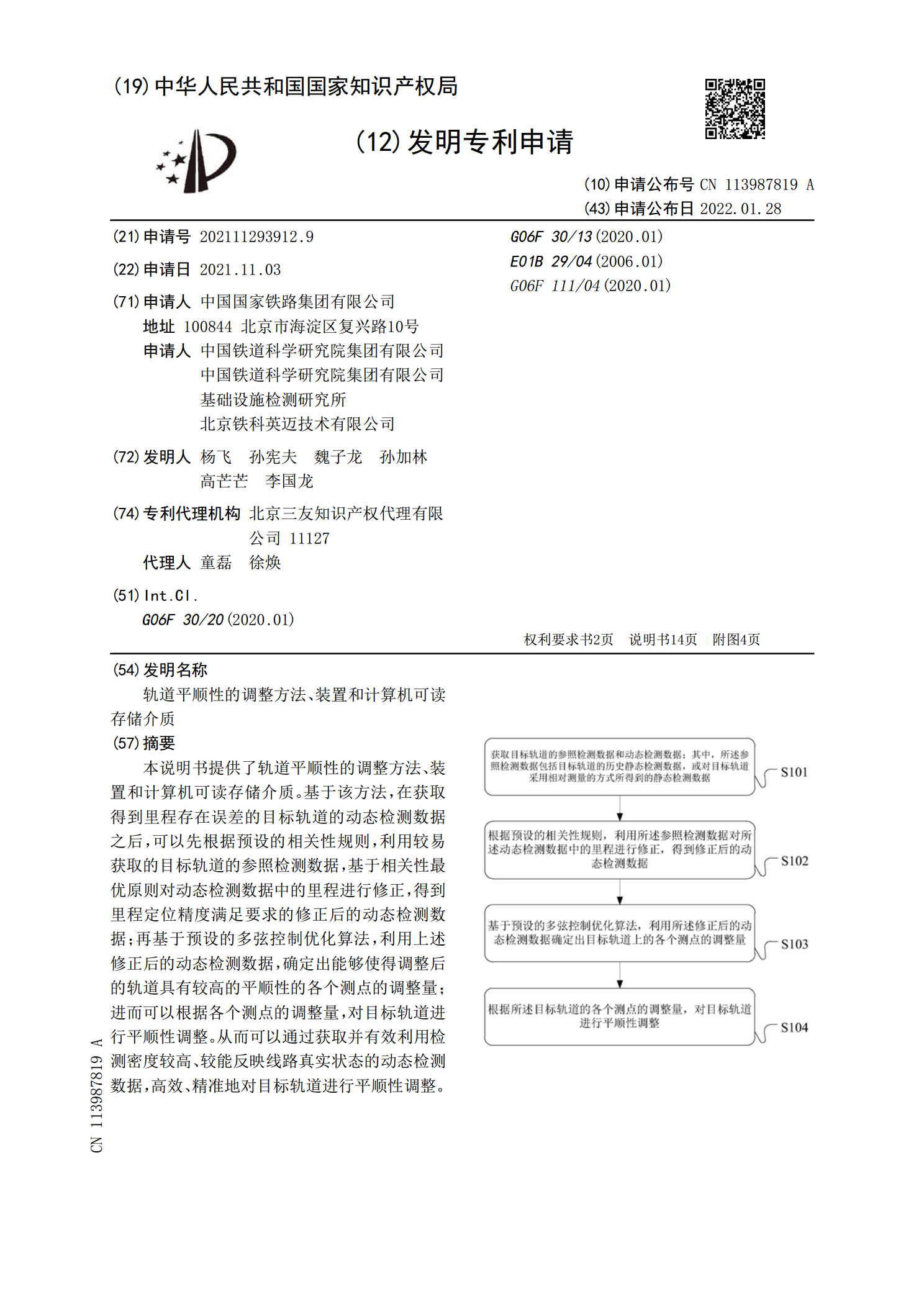
本说明书提供了轨道平顺性的调整方法、装置和计算机可读存储介质。基于该方法,在获取得到里程存在误差的目标轨道的动态检测数据之后,可以先根据预设的相关性规则,利用较易获取的目标轨道的参照检测数据,基于相关性最优原则对动态检测数据中的里程进行修正,得到里程定位精度满足要求的修正后的动态检测数据;再基于预设的多弦控制优化算法,利用上述修正后的动态检测数据,确定出能够使得调整后的轨道具有较高的平顺性的各个测点的调整量;进而可以根据各个测点的调整量,对目标轨道进行平顺性调整。从而可以通过获取并有效利用检测密度较高、较
座椅装置的调整方法及装置、设备和计算机可读存储介质.pdf
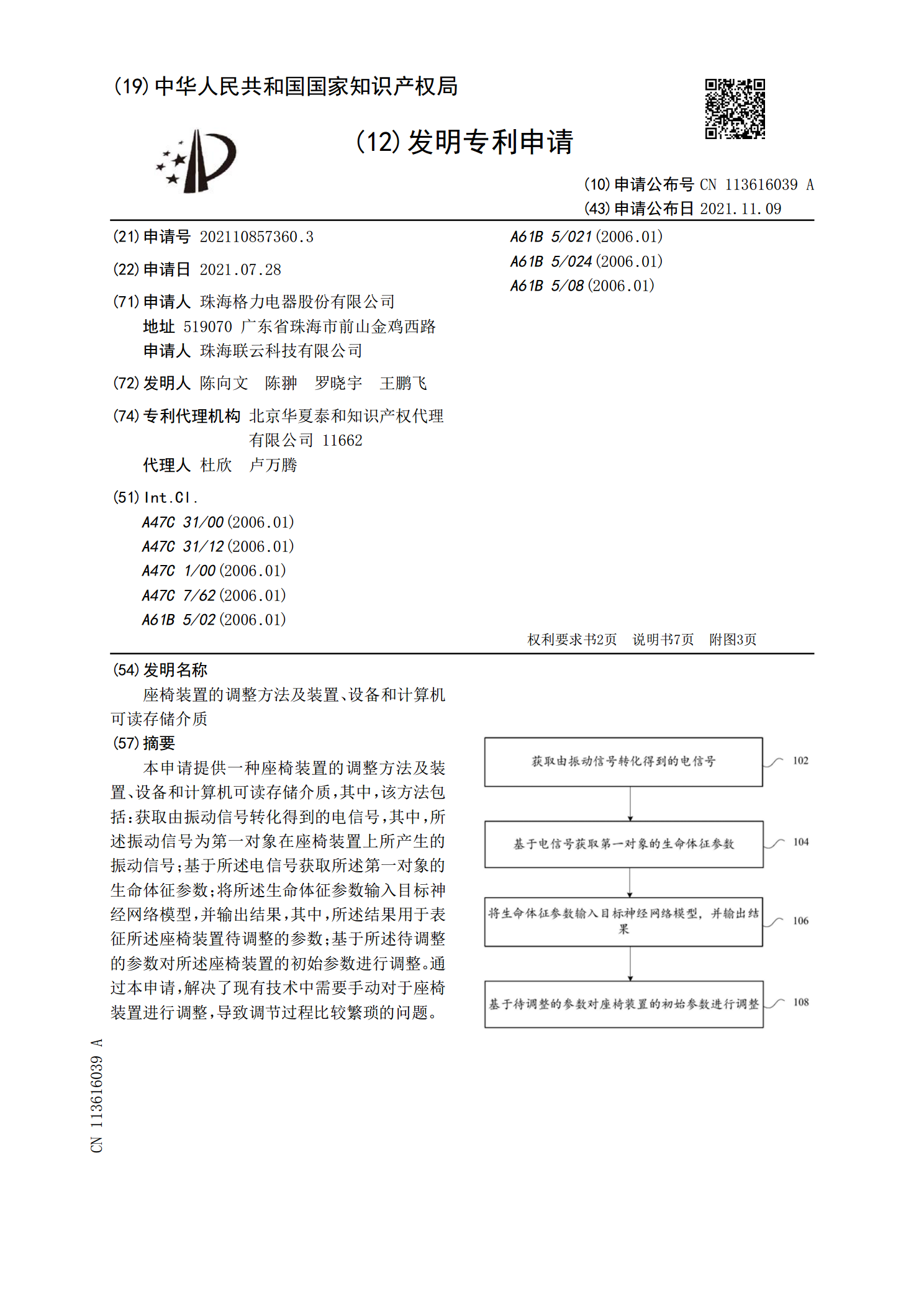
本申请提供一种座椅装置的调整方法及装置、设备和计算机可读存储介质,其中,该方法包括:获取由振动信号转化得到的电信号,其中,所述振动信号为第一对象在座椅装置上所产生的振动信号;基于所述电信号获取所述第一对象的生命体征参数;将所述生命体征参数输入目标神经网络模型,并输出结果,其中,所述结果用于表征所述座椅装置待调整的参数;基于所述待调整的参数对所述座椅装置的初始参数进行调整。通过本申请,解决了现有技术中需要手动对于座椅装置进行调整,导致调节过程比较繁琐的问题。
图像调整方法、装置、电子设备和计算机可读存储介质.pdf
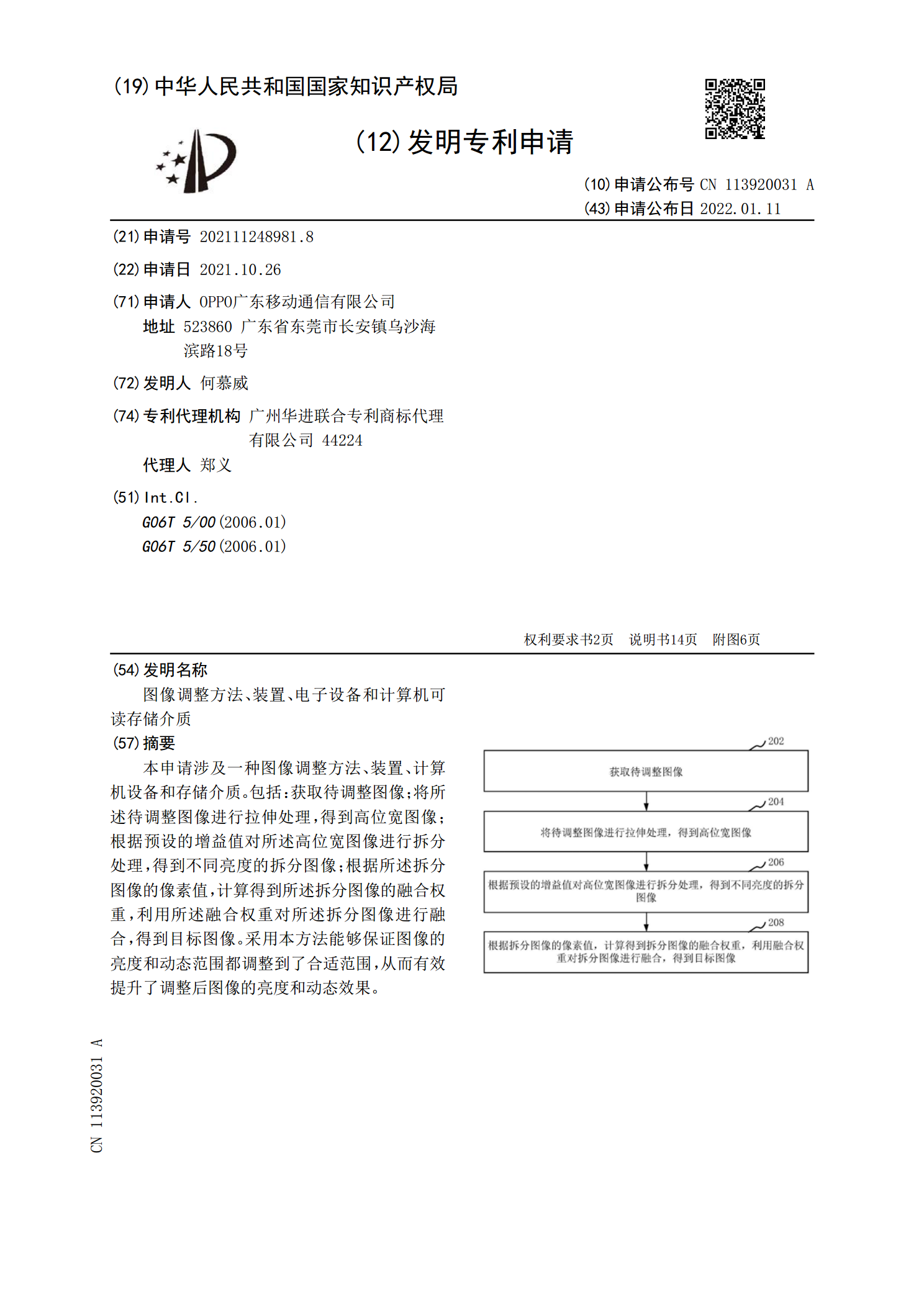
本申请涉及一种图像调整方法、装置、计算机设备和存储介质。包括:获取待调整图像;将所述待调整图像进行拉伸处理,得到高位宽图像;根据预设的增益值对所述高位宽图像进行拆分处理,得到不同亮度的拆分图像;根据所述拆分图像的像素值,计算得到所述拆分图像的融合权重,利用所述融合权重对所述拆分图像进行融合,得到目标图像。采用本方法能够保证图像的亮度和动态范围都调整到了合适范围,从而有效提升了调整后图像的亮度和动态效果。

音频调整方法和装置、电子设备以及计算机可读存储介质.pdf
本申请公开了一种音频调整方法和装置、电子设备以及计算机可读存储介质。该方法包括:由音频播放单元播放预置的基准音频;记录由音频接收单元接收的基准音频的现场数据;根据所述现场数据调整所述音频设备。本申请实施例通过内置的音频播放模块和音频接收模块来基于预置的校准音频对音箱的音质进行调整和校准,因此能够消除用户在购买后使用专业校准工具对使用环境中的音箱进行音质调整和校准的需要,提高了用户使用音箱的便利性,提升了用户体验。
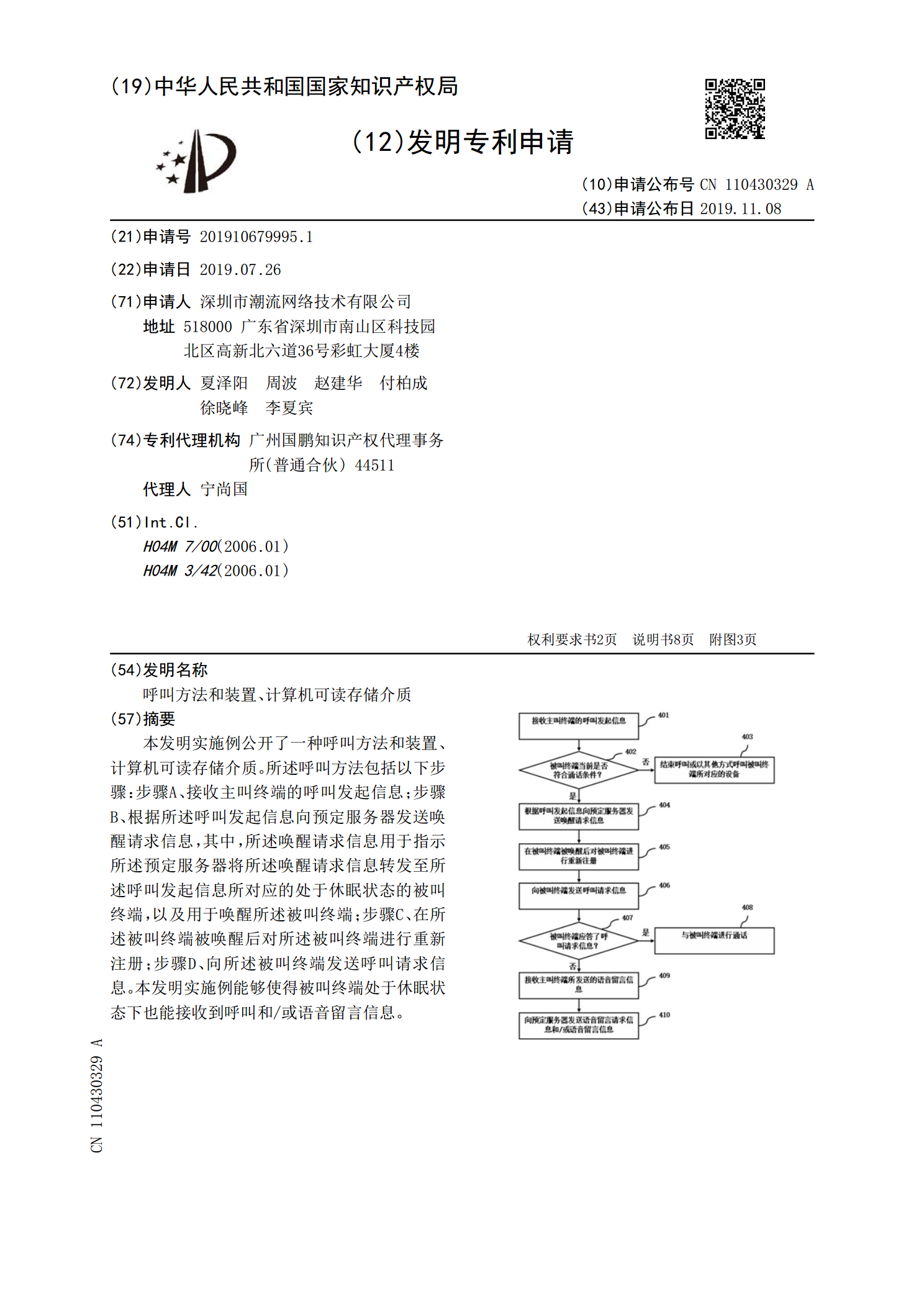
呼叫方法和装置、计算机可读存储介质.pdf
本发明实施例公开了一种呼叫方法和装置、计算机可读存储介质。所述呼叫方法包括以下步骤:步骤A、接收主叫终端的呼叫发起信息;步骤B、根据所述呼叫发起信息向预定服务器发送唤醒请求信息,其中,所述唤醒请求信息用于指示所述预定服务器将所述唤醒请求信息转发至所述呼叫发起信息所对应的处于休眠状态的被叫终端,以及用于唤醒所述被叫终端;步骤C、在所述被叫终端被唤醒后对所述被叫终端进行重新注册;步骤D、向所述被叫终端发送呼叫请求信息。本发明实施例能够使得被叫终端处于休眠状态下也能接收到呼叫和/或语音留言信息。