
背景点云滤除方法、装置、计算机设备和存储介质.pdf

绮兰****文章


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

背景点云滤除方法、装置、计算机设备和存储介质.pdf
本申请涉及一种背景点云滤除方法、装置、计算机设备和存储介质。所述方法包括:获取目标场景对应的背景查找表,所述背景查找表包括与多个二维栅格一一对应的多个第一点云高度最小值,获取目标场景的实时点云数据,所述实时点云数据包括多个实时点云点;将所述多个实时点云点映射至所述多个二维栅格中,并确定每个所述二维栅格映射的实时点云点的第二点云高度最小值;对于每个所述二维栅格,若所述二维栅格对应的第二点云高度最小值小于所述二维栅格对应的第一点云高度最小值,则根据所述二维栅格对应的第二点云高度最小值对所述二维栅格对应的第一点

一种点云地面点的滤除方法、装置、设备及存储介质.pdf
本发明公开了一种点云地面点的滤除方法、装置、设备及存储介质。该方法包括获取待滤除的目标三维点云数据;按照预设的聚类算法,对目标三维点云数据中的各点云点进行聚类处理,得到多个聚类集合;在各聚类集合中,识别与地面匹配的至少一个目标聚类集合,并根据各目标聚类集合中每个目标点云点的法向量,计算法向量均值;根据目标三维点云数据中各点云点的法向量与法向量均值之间的数值差异,在目标三维点云数据中识别并滤除全部点云地面点。本发明实施例的技术方案提供一种点云地面点的滤除方法,有效改善非地面点缺失,提高对地面点滤除的准确性,

滤除回声的方法、电子设备和计算机可读存储介质.pdf
本公开涉及一种用于滤除回声的方法、电子设备和计算机可读存储介质。该方法应用于电子设备。电子设备包括M个麦克风和N个扬声器,M个N均为大于1的整数。该方法包括获取与N个扬声器对应的N个扬声器信号;获取与M个麦克风对应的M个麦克风信号;以及针对N个扬声器信号以及M个麦克风信号至少进行直达声滤波以得到目标信号。通过使用根据本公开的方案,可以获得更好的回声滤除效果。

云测试方法、装置、电子设备和计算机存储介质.pdf
本发明实施例提供了一种云测试方法、装置、电子设备和计算机存储介质。所述云测试方法包括:控制待测试音频程序在所管理的多个云真机中播放目标音频,相应地采集多个音频数据;提供所述多个音频数据,以基于所述多个音频数据对所述多个云真机进行音频兼容性测试。在本发明实施例的方案中,由于可以在多个云真机中控制相同的待测试音频程序播放目标音频,并且采集了多个音频数据,实现了高效的播放控制和数据采集。此外,通过采集到的多个音频数据对所述多个云真机进行音频兼容性测试,进一步实现了高效的兼容性测试。
云存储设备的控制方法和装置、存储介质及电子设备.pdf
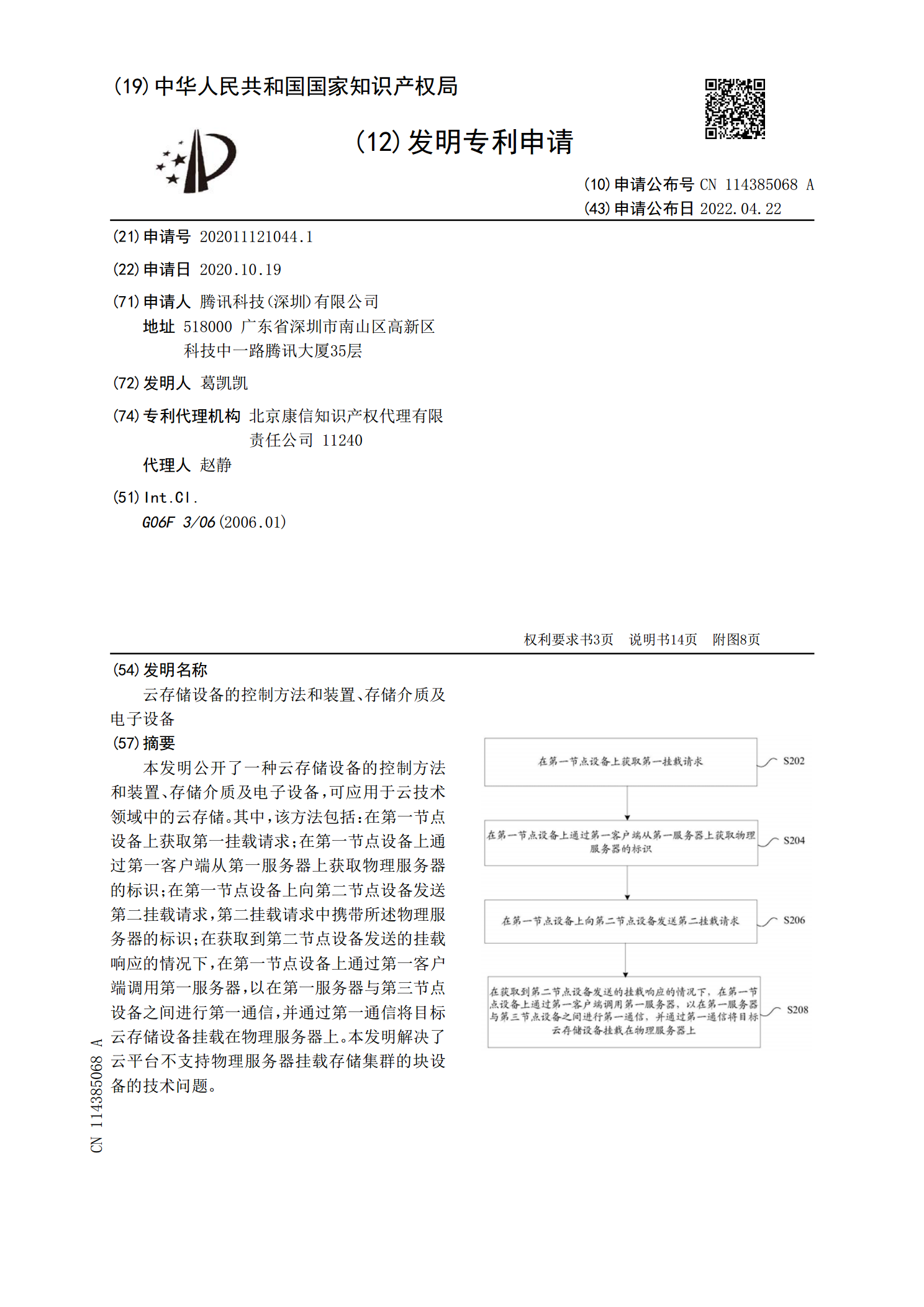
本发明公开了一种云存储设备的控制方法和装置、存储介质及电子设备,可应用于云技术领域中的云存储。其中,该方法包括:在第一节点设备上获取第一挂载请求;在第一节点设备上通过第一客户端从第一服务器上获取物理服务器的标识;在第一节点设备上向第二节点设备发送第二挂载请求,第二挂载请求中携带所述物理服务器的标识;在获取到第二节点设备发送的挂载响应的情况下,在第一节点设备上通过第一客户端调用第一服务器,以在第一服务器与第三节点设备之间进行第一通信,并通过第一通信将目标云存储设备挂载在物理服务器上。本发明解决了云平台不支持