
一种变焦方法及装置.pdf

飞舟****文章


1/10

2/10

3/10

4/10
5/10

6/10

7/10

8/10
9/10

10/10
亲,该文档总共48页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种变焦方法及装置.pdf
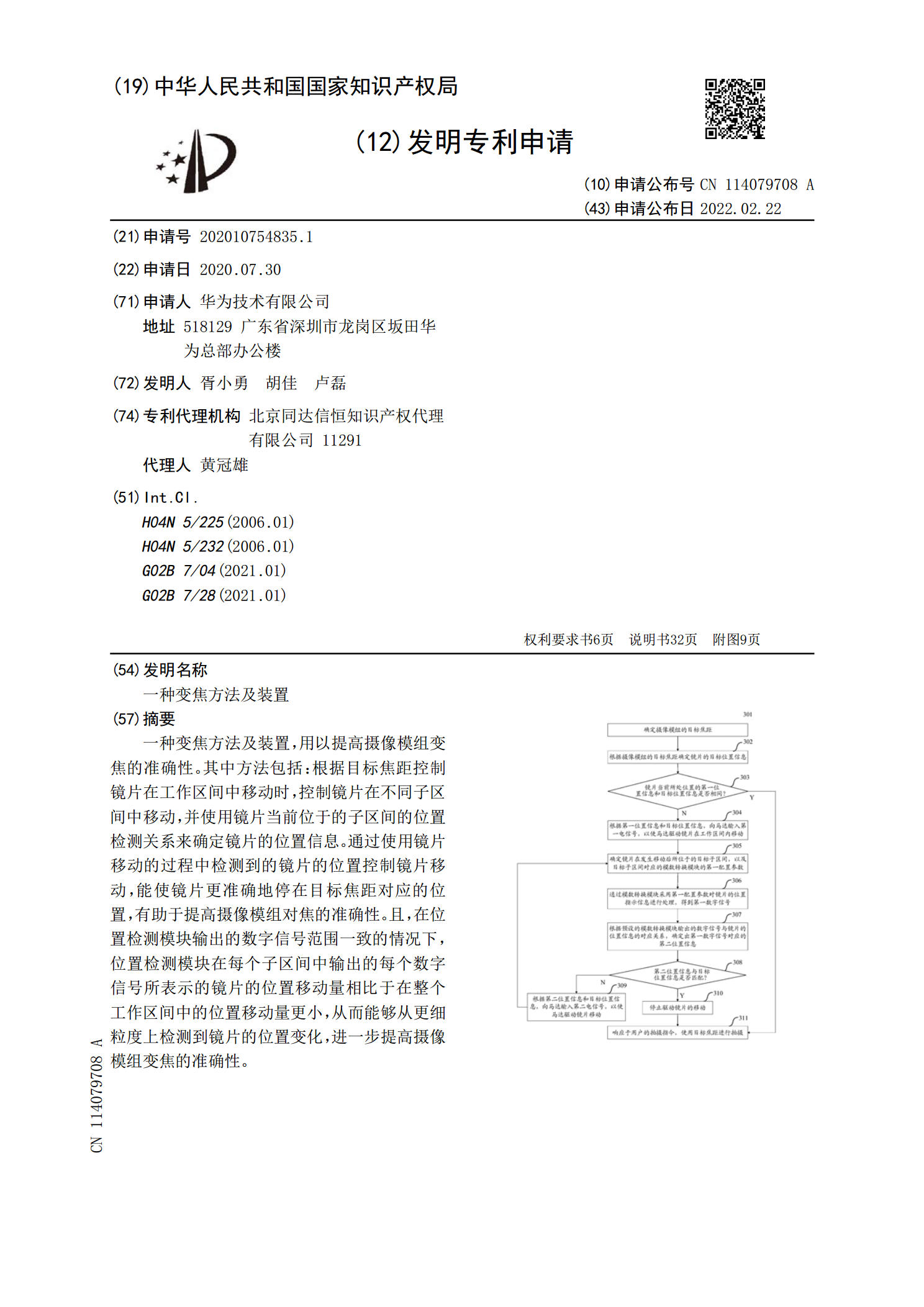
一种变焦方法及装置,用以提高摄像模组变焦的准确性。其中方法包括:根据目标焦距控制镜片在工作区间中移动时,控制镜片在不同子区间中移动,并使用镜片当前位于的子区间的位置检测关系来确定镜片的位置信息。通过使用镜片移动的过程中检测到的镜片的位置控制镜片移动,能使镜片更准确地停在目标焦距对应的位置,有助于提高摄像模组对焦的准确性。且,在位置检测模块输出的数字信号范围一致的情况下,位置检测模块在每个子区间中输出的每个数字信号所表示的镜片的位置移动量相比于在整个工作区间中的位置移动量更小,从而能够从更细粒度上检测到镜片

一种变焦测距方法及装置.pdf
本发明涉及一种变焦测距方法,包括以下步骤:步骤S1:对可变倍相机进行不同倍率下的标定,生成不同倍率下的焦距曲线;步骤S2:通过目标识别技术对监测区域内的目标物进行识别;步骤S3:根据目标物特征在不同焦距段拍照,基于前后两次不同焦距段的图像计算物体距离摄像机的距离和坐标。本发明解决了传统视觉测量技术适用于远距离测量的不足,弥补了传统视觉测量技术的不足。

一种自动变焦的方法和装置.pdf
本发明实施例提供一种自动变焦的方法和装置,包括:根据屏幕上预览框内的预览图像,确定所述预览图像的主体的轮廓以及所述主体的中心点,当所述主体的中心点与所述预览框的中心点重合时,根据所述主体的轮廓大小和所述预览框的大小确定变焦参数,所述变焦参数包括摄像头的待调整焦距和所述预览图像的缩放倍数中的至少一个;根据所述变焦参数对所述摄像头进行变焦。采用上述方法能够帮助用户快速的将预览图像的主体调整到合适的大小。
一种连续变焦装置及其装配方法.pdf
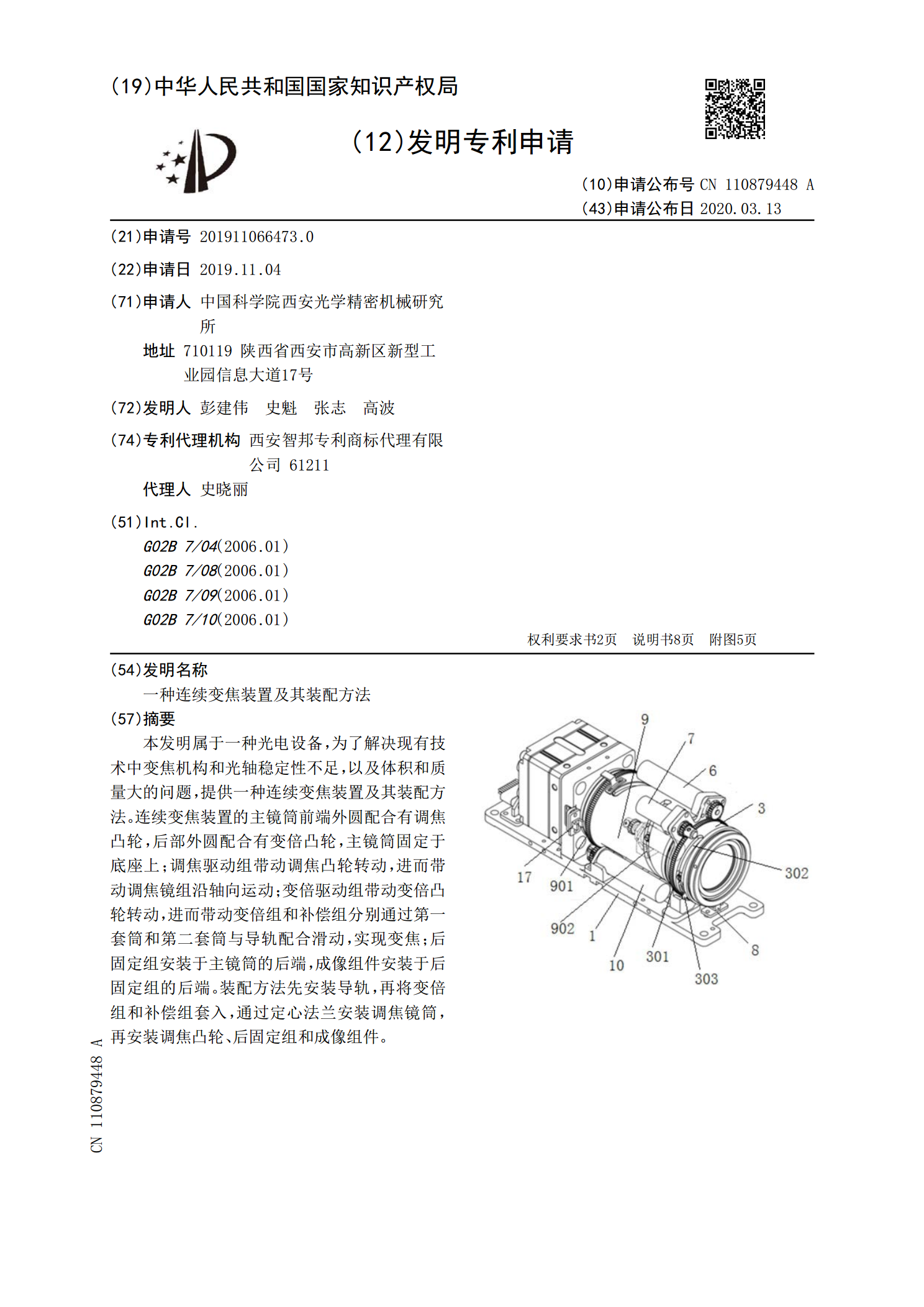
本发明属于一种光电设备,为了解决现有技术中变焦机构和光轴稳定性不足,以及体积和质量大的问题,提供一种连续变焦装置及其装配方法。连续变焦装置的主镜筒前端外圆配合有调焦凸轮,后部外圆配合有变倍凸轮,主镜筒固定于底座上;调焦驱动组带动调焦凸轮转动,进而带动调焦镜组沿轴向运动;变倍驱动组带动变倍凸轮转动,进而带动变倍组和补偿组分别通过第一套筒和第二套筒与导轨配合滑动,实现变焦;后固定组安装于主镜筒的后端,成像组件安装于后固定组的后端。装配方法先安装导轨,再将变倍组和补偿组套入,通过定心法兰安装调焦镜筒,再安装调焦
一种自动变焦方法、装置、自拍器及存储介质.pdf
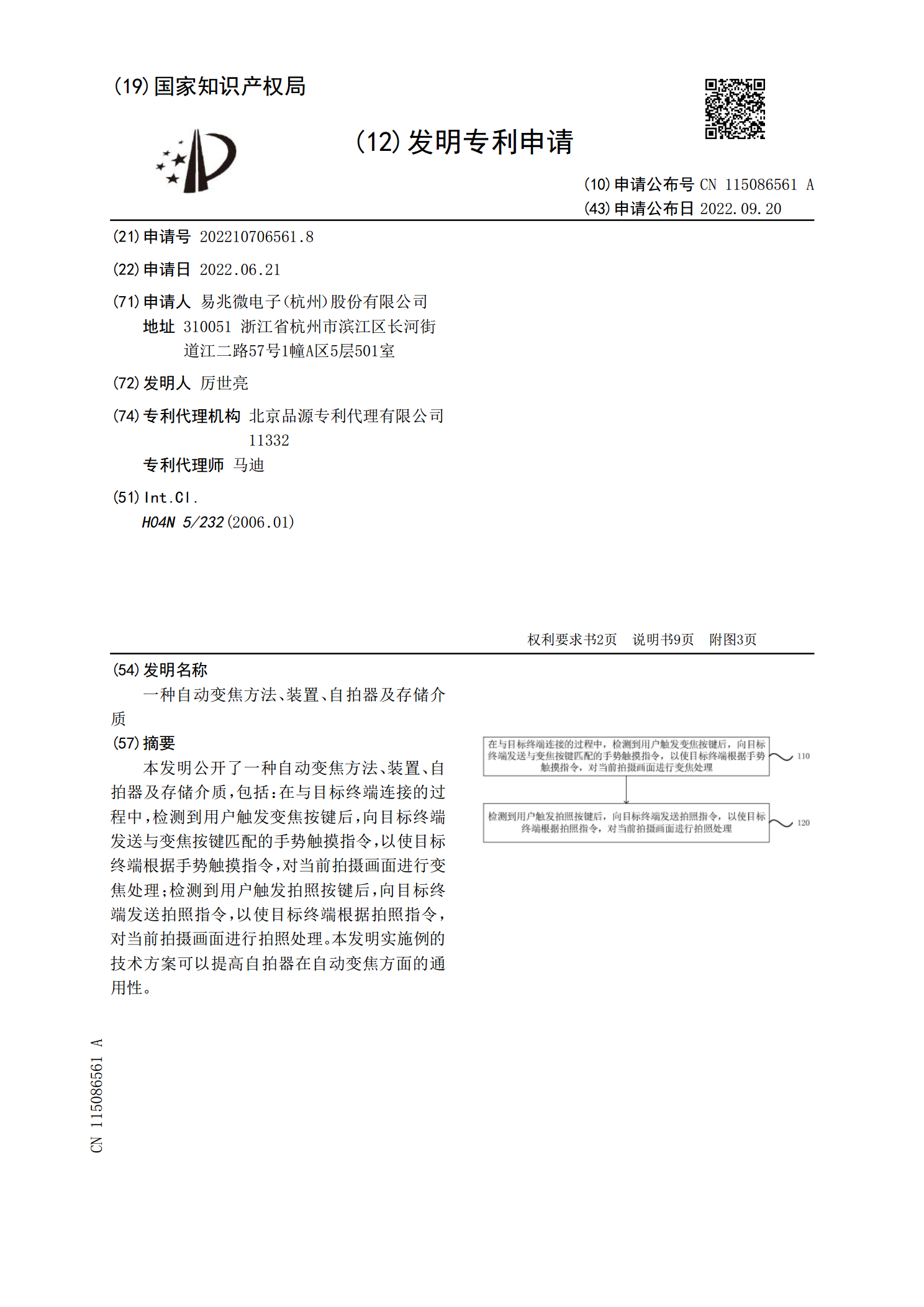
本发明公开了一种自动变焦方法、装置、自拍器及存储介质,包括:在与目标终端连接的过程中,检测到用户触发变焦按键后,向目标终端发送与变焦按键匹配的手势触摸指令,以使目标终端根据手势触摸指令,对当前拍摄画面进行变焦处理;检测到用户触发拍照按键后,向目标终端发送拍照指令,以使目标终端根据拍照指令,对当前拍摄画面进行拍照处理。本发明实施例的技术方案可以提高自拍器在自动变焦方面的通用性。