
一种全景视频剪辑方法、装置、存储介质及设备.pdf

St****12

1/10

2/10

3/10

4/10

5/10
6/10

7/10

8/10
9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种全景视频剪辑方法、装置、存储介质及设备.pdf
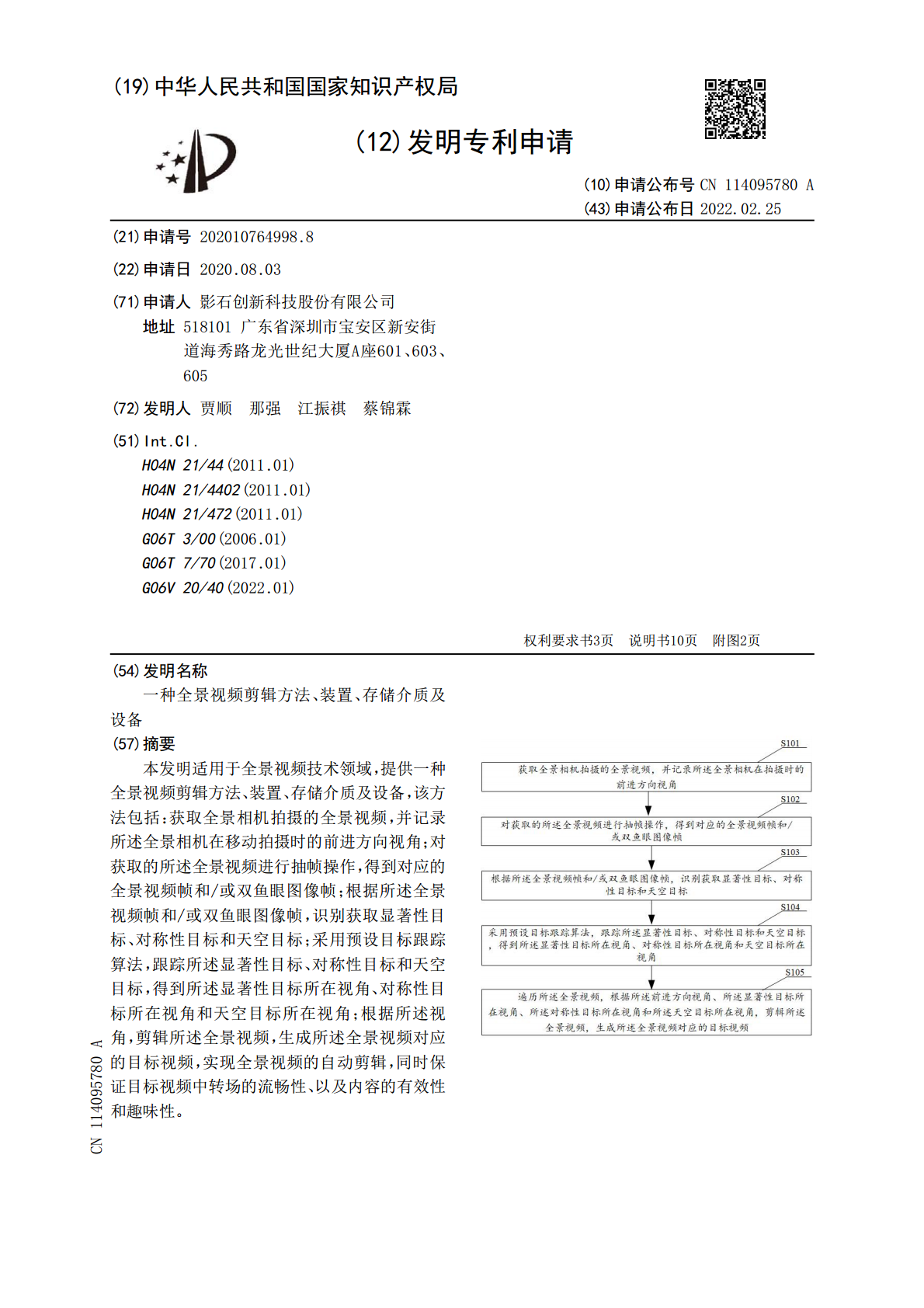
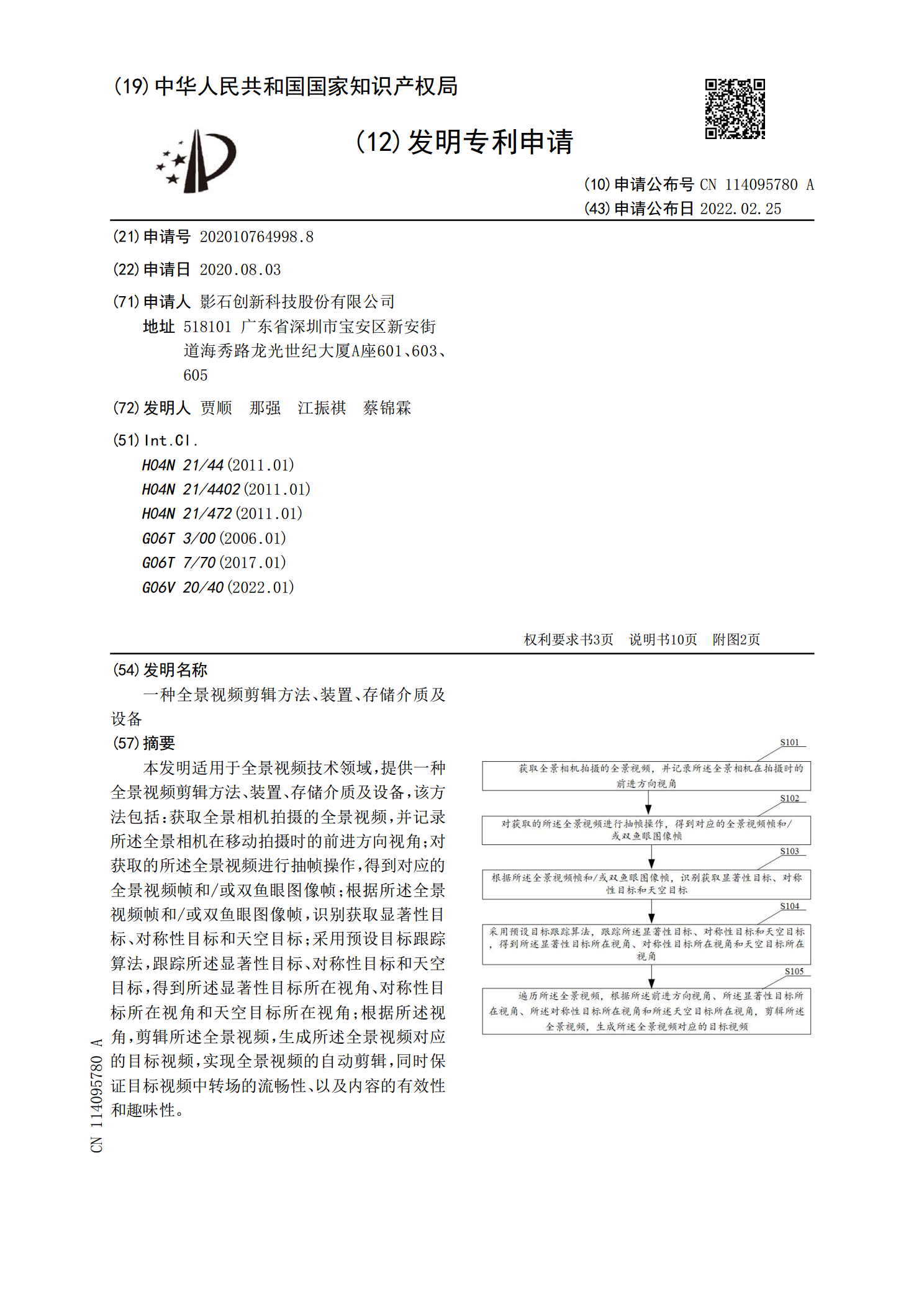
本发明适用于全景视频技术领域,提供一种全景视频剪辑方法、装置、存储介质及设备,该方法包括:获取全景相机拍摄的全景视频,并记录所述全景相机在移动拍摄时的前进方向视角;对获取的所述全景视频进行抽帧操作,得到对应的全景视频帧和/或双鱼眼图像帧;根据所述全景视频帧和/或双鱼眼图像帧,识别获取显著性目标、对称性目标和天空目标;采用预设目标跟踪算法,跟踪所述显著性目标、对称性目标和天空目标,得到所述显著性目标所在视角、对称性目标所在视角和天空目标所在视角;根据所述视角,剪辑所述全景视频,生成所述全景视频对应的目标视频

视频剪辑方法、装置、设备及存储介质.pdf
本申请实施例公开了一种视频剪辑方法、装置、设备及存储介质,属于视频处理技术领域。所述方法包括:从素材视频中抽取多个图像帧;确定各个图像帧的质量分;在时域上对各个图像帧进行排列,并对质量分进行插值处理,得到素材视频的质量分曲线;基于质量分曲线和视频剪辑策略,从素材视频中剪辑得到目标视频。本申请实现了自动化地从素材视频中截取高质量的视频片段,从而提升了视频剪辑的效率和质量效果。
视频剪辑方法、装置、设备及存储介质.pdf
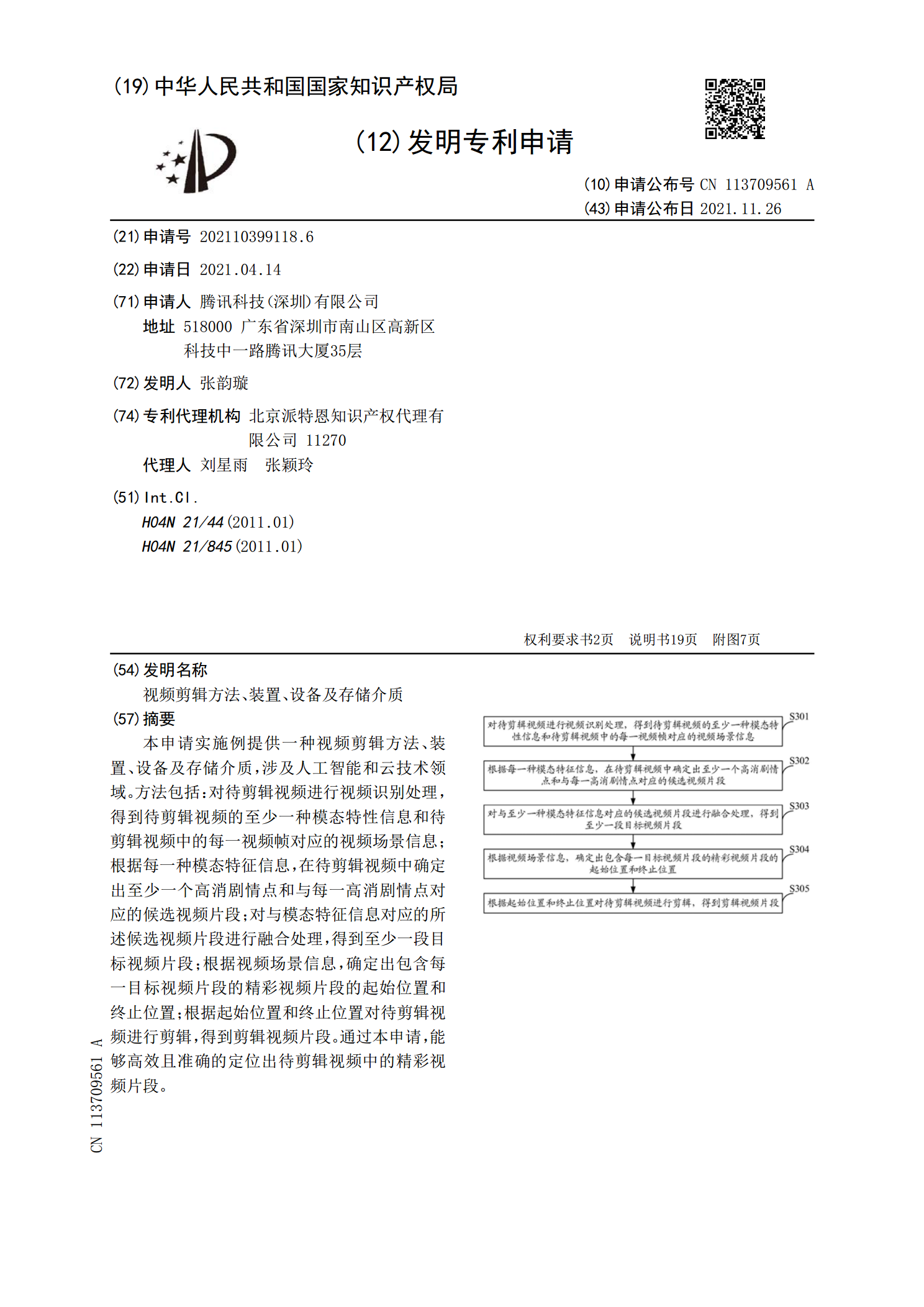
本申请实施例提供一种视频剪辑方法、装置、设备及存储介质,涉及人工智能和云技术领域。方法包括:对待剪辑视频进行视频识别处理,得到待剪辑视频的至少一种模态特性信息和待剪辑视频中的每一视频帧对应的视频场景信息;根据每一种模态特征信息,在待剪辑视频中确定出至少一个高消剧情点和与每一高消剧情点对应的候选视频片段;对与模态特征信息对应的所述候选视频片段进行融合处理,得到至少一段目标视频片段;根据视频场景信息,确定出包含每一目标视频片段的精彩视频片段的起始位置和终止位置;根据起始位置和终止位置对待剪辑视频进行剪辑,得到
视频剪辑方法、装置、计算设备及存储介质.pdf
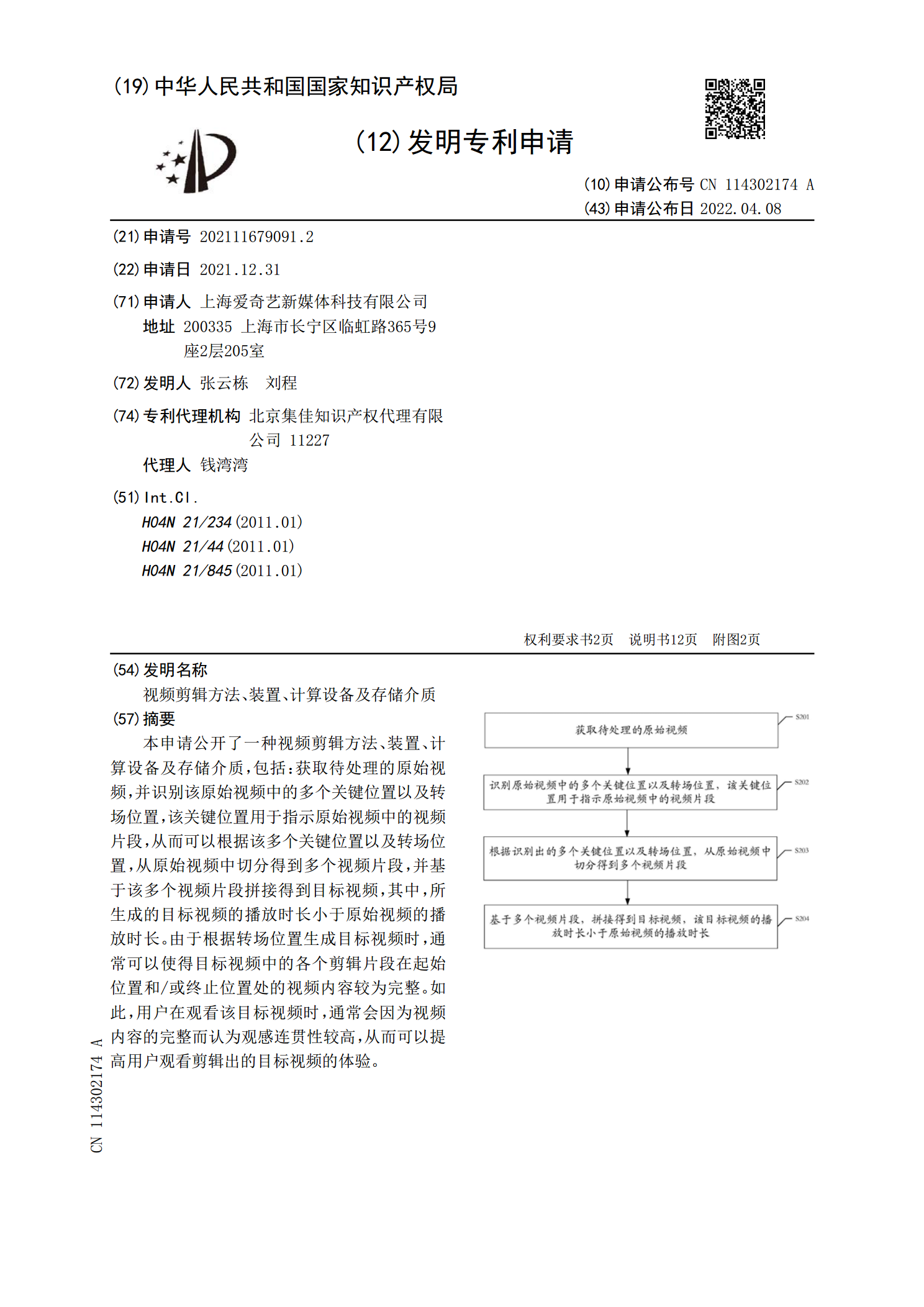
本申请公开了一种视频剪辑方法、装置、计算设备及存储介质,包括:获取待处理的原始视频,并识别该原始视频中的多个关键位置以及转场位置,该关键位置用于指示原始视频中的视频片段,从而可以根据该多个关键位置以及转场位置,从原始视频中切分得到多个视频片段,并基于该多个视频片段拼接得到目标视频,其中,所生成的目标视频的播放时长小于原始视频的播放时长。由于根据转场位置生成目标视频时,通常可以使得目标视频中的各个剪辑片段在起始位置和/或终止位置处的视频内容较为完整。如此,用户在观看该目标视频时,通常会因为视频内容的完整而认
视频剪辑方法、装置、计算设备及存储介质.pdf
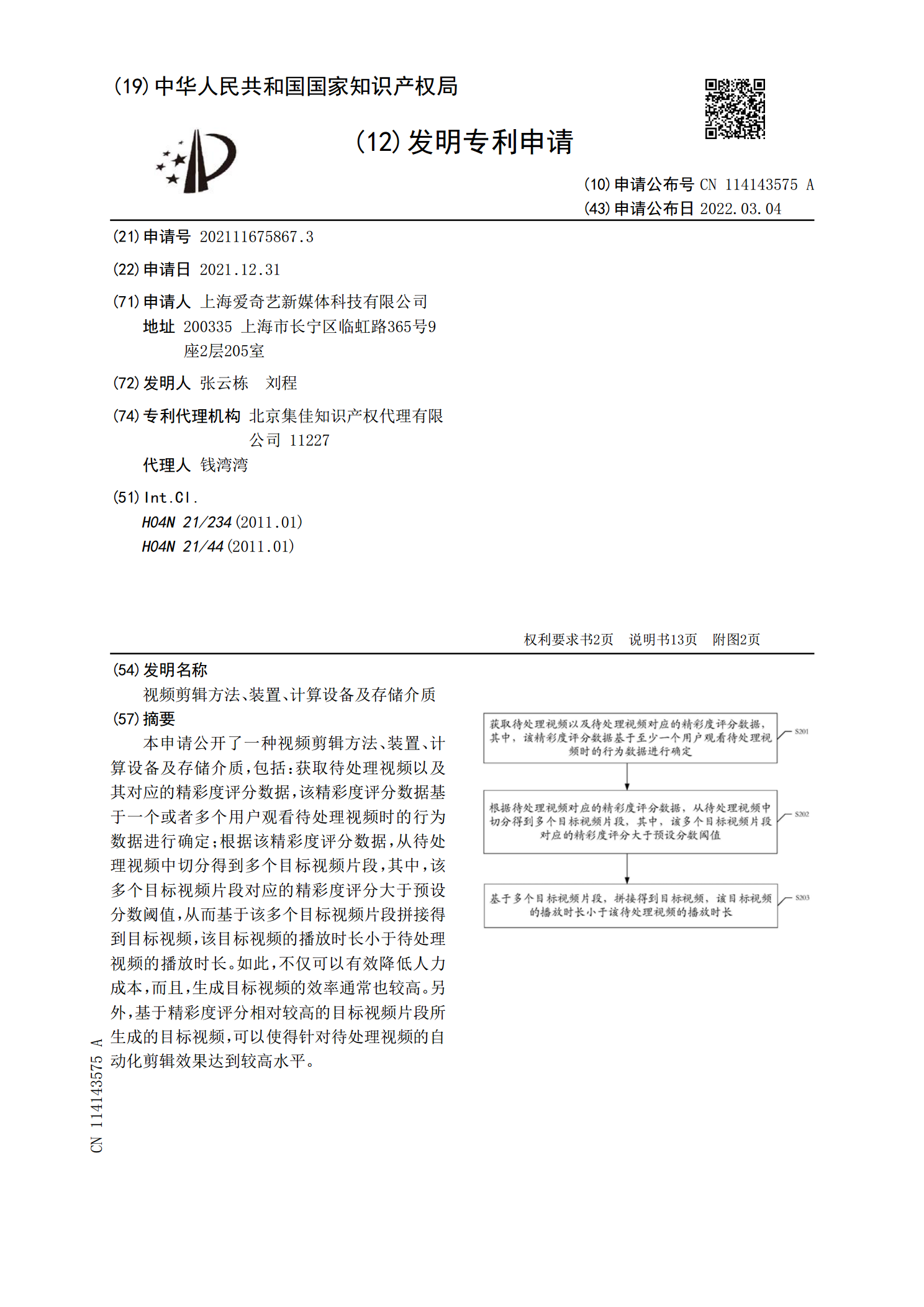
本申请公开了一种视频剪辑方法、装置、计算设备及存储介质,包括:获取待处理视频以及其对应的精彩度评分数据,该精彩度评分数据基于一个或者多个用户观看待处理视频时的行为数据进行确定;根据该精彩度评分数据,从待处理视频中切分得到多个目标视频片段,其中,该多个目标视频片段对应的精彩度评分大于预设分数阈值,从而基于该多个目标视频片段拼接得到目标视频,该目标视频的播放时长小于待处理视频的播放时长。如此,不仅可以有效降低人力成本,而且,生成目标视频的效率通常也较高。另外,基于精彩度评分相对较高的目标视频片段所生成的目标视