
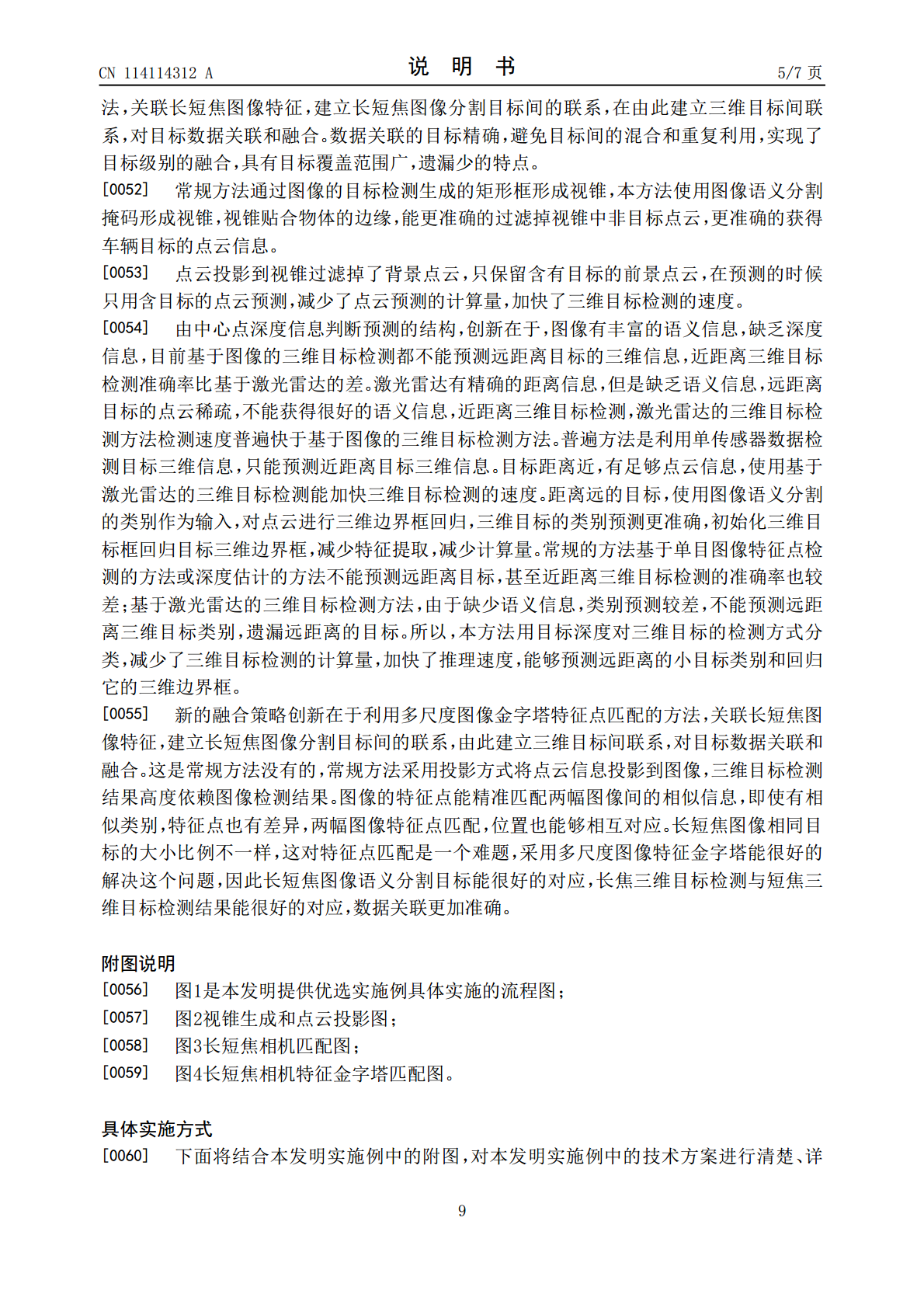
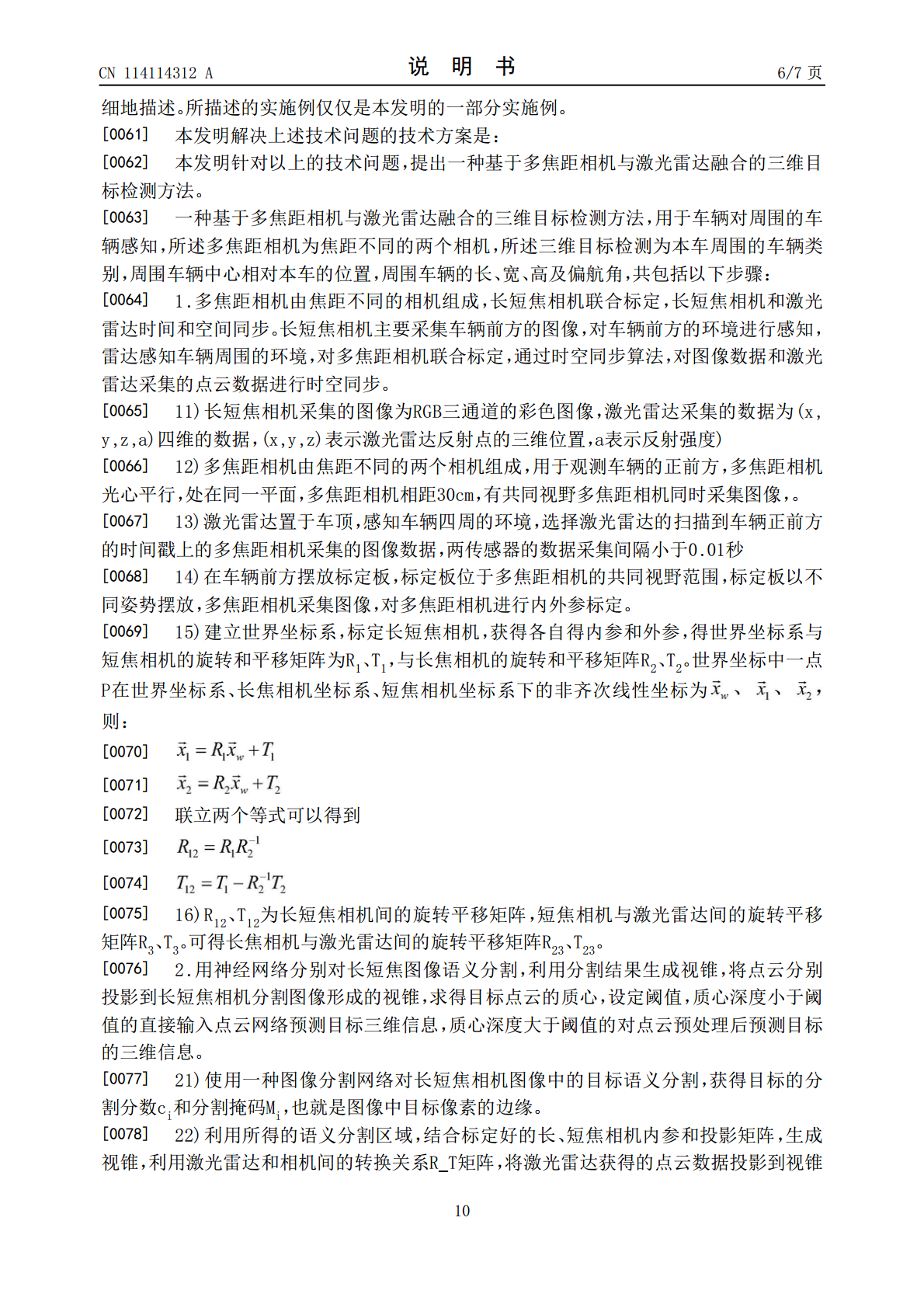
一种基于多焦距相机与激光雷达融合的三维目标检测方法.pdf

Jo****63


1/10

2/10
3/10
4/10

5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于多焦距相机与激光雷达融合的三维目标检测方法.pdf
本发明请求保护一种基于多焦距相机与激光雷达融合的三维目标检测方法,属于自动驾驶、三维目标检测领域。包括以下步骤:1.多焦距相机由长短焦相机组成,对多焦距相机和激光雷达数据时空同步处理。2.利用分割网络分别对多焦距相机图像语义分割,利用分割结果生成视锥体,将激光雷达点云分别投影到长焦、短焦图像形成的视锥进行三维目标检测。3.利用多尺度图像金字塔实现长短焦图像特征点的精确匹配,通过特征匹配建立长短焦分割图像目标间的联系,通过这种联系对三维目标的数据关联和数据融合。本发明能应用在自动驾驶或辅助驾驶车辆上,对车辆
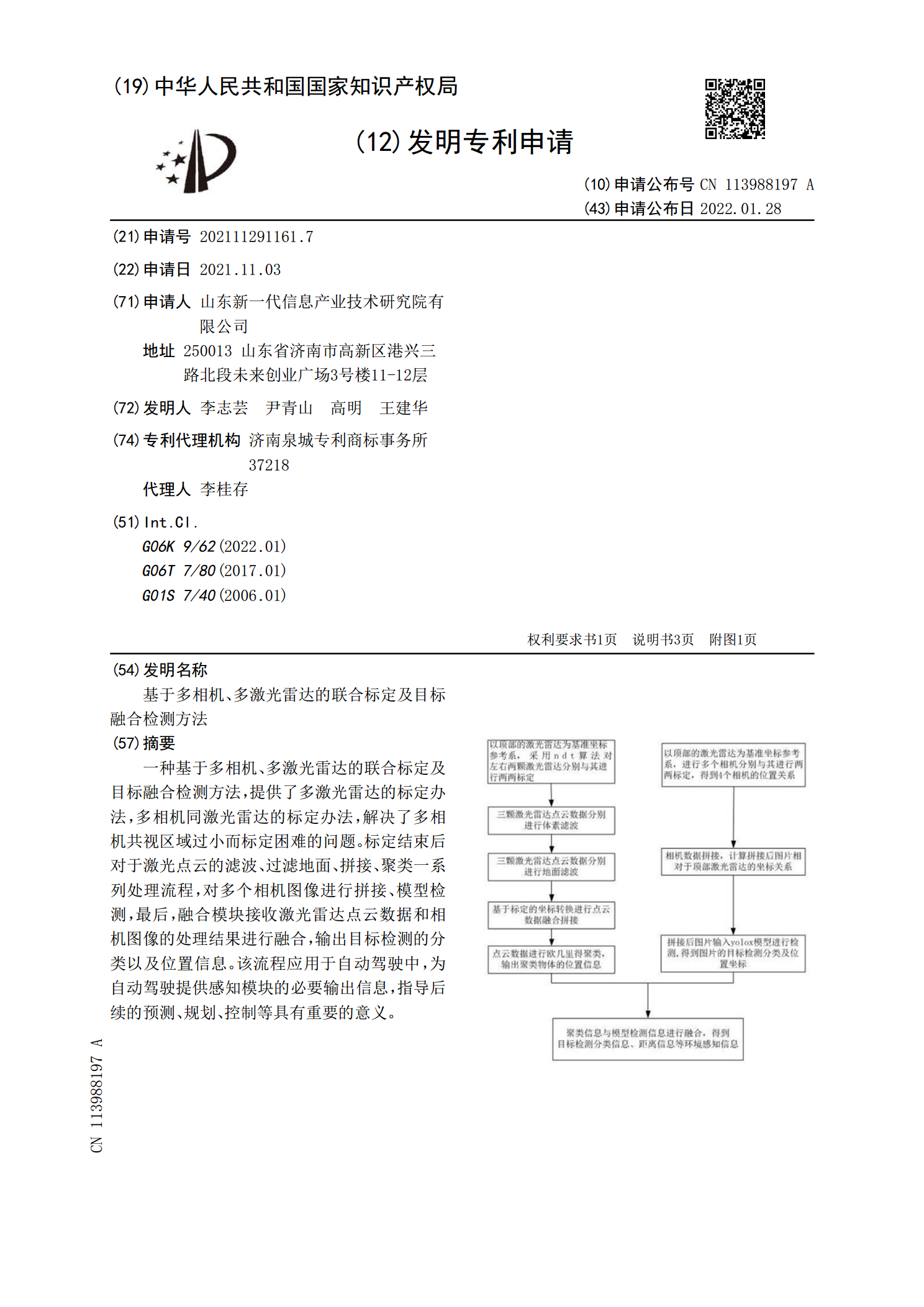
基于多相机、多激光雷达的联合标定及目标融合检测方法.pdf
一种基于多相机、多激光雷达的联合标定及目标融合检测方法,提供了多激光雷达的标定办法,多相机同激光雷达的标定办法,解决了多相机共视区域过小而标定困难的问题。标定结束后对于激光点云的滤波、过滤地面、拼接、聚类一系列处理流程,对多个相机图像进行拼接、模型检测,最后,融合模块接收激光雷达点云数据和相机图像的处理结果进行融合,输出目标检测的分类以及位置信息。该流程应用于自动驾驶中,为自动驾驶提供感知模块的必要输出信息,指导后续的预测、规划、控制等具有重要的意义。
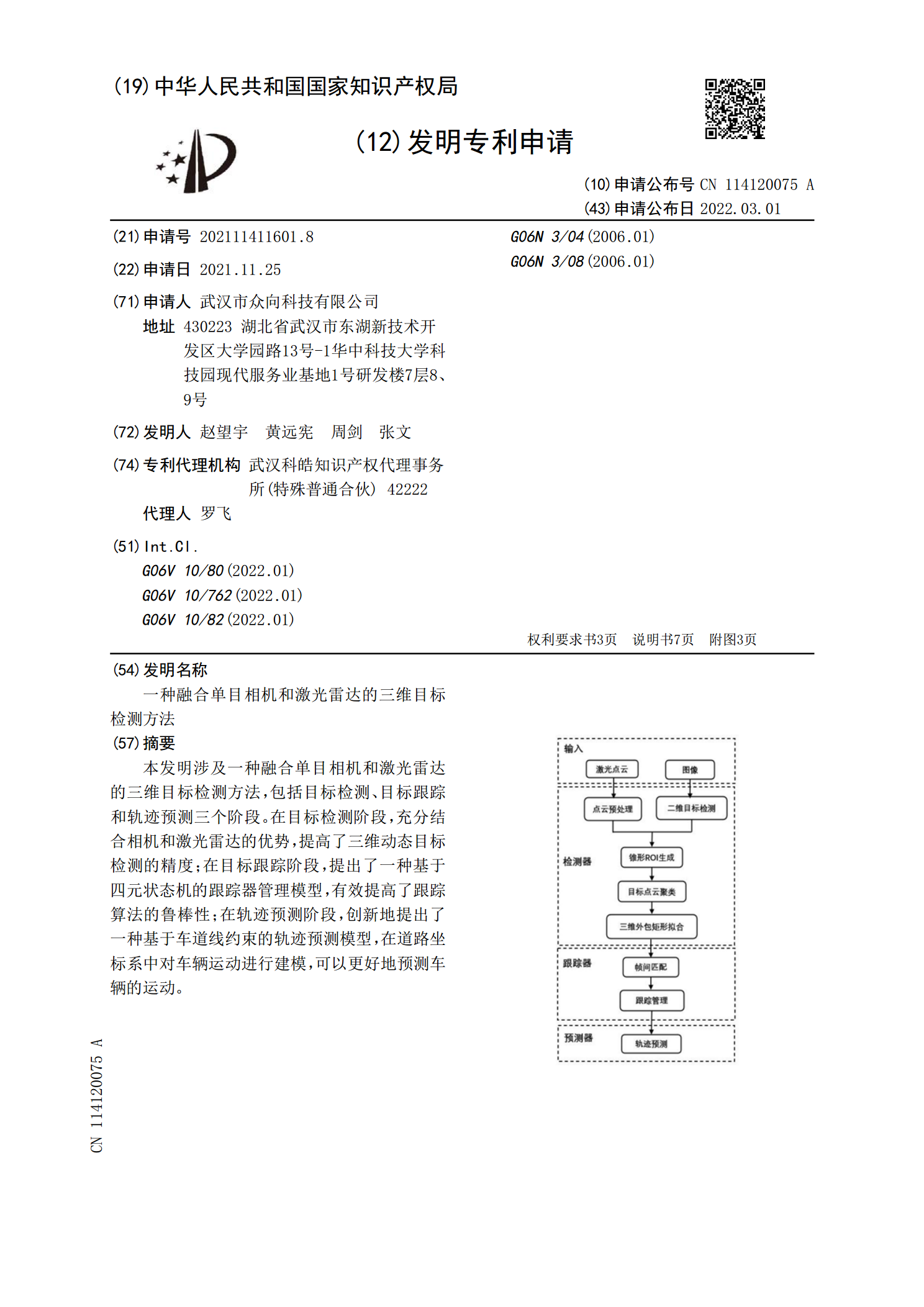
一种融合单目相机和激光雷达的三维目标检测方法.pdf
本发明涉及一种融合单目相机和激光雷达的三维目标检测方法,包括目标检测、目标跟踪和轨迹预测三个阶段。在目标检测阶段,充分结合相机和激光雷达的优势,提高了三维动态目标检测的精度;在目标跟踪阶段,提出了一种基于四元状态机的跟踪器管理模型,有效提高了跟踪算法的鲁棒性;在轨迹预测阶段,创新地提出了一种基于车道线约束的轨迹预测模型,在道路坐标系中对车辆运动进行建模,可以更好地预测车辆的运动。
基于相机和激光雷达的三维目标检测方法及系统.pdf
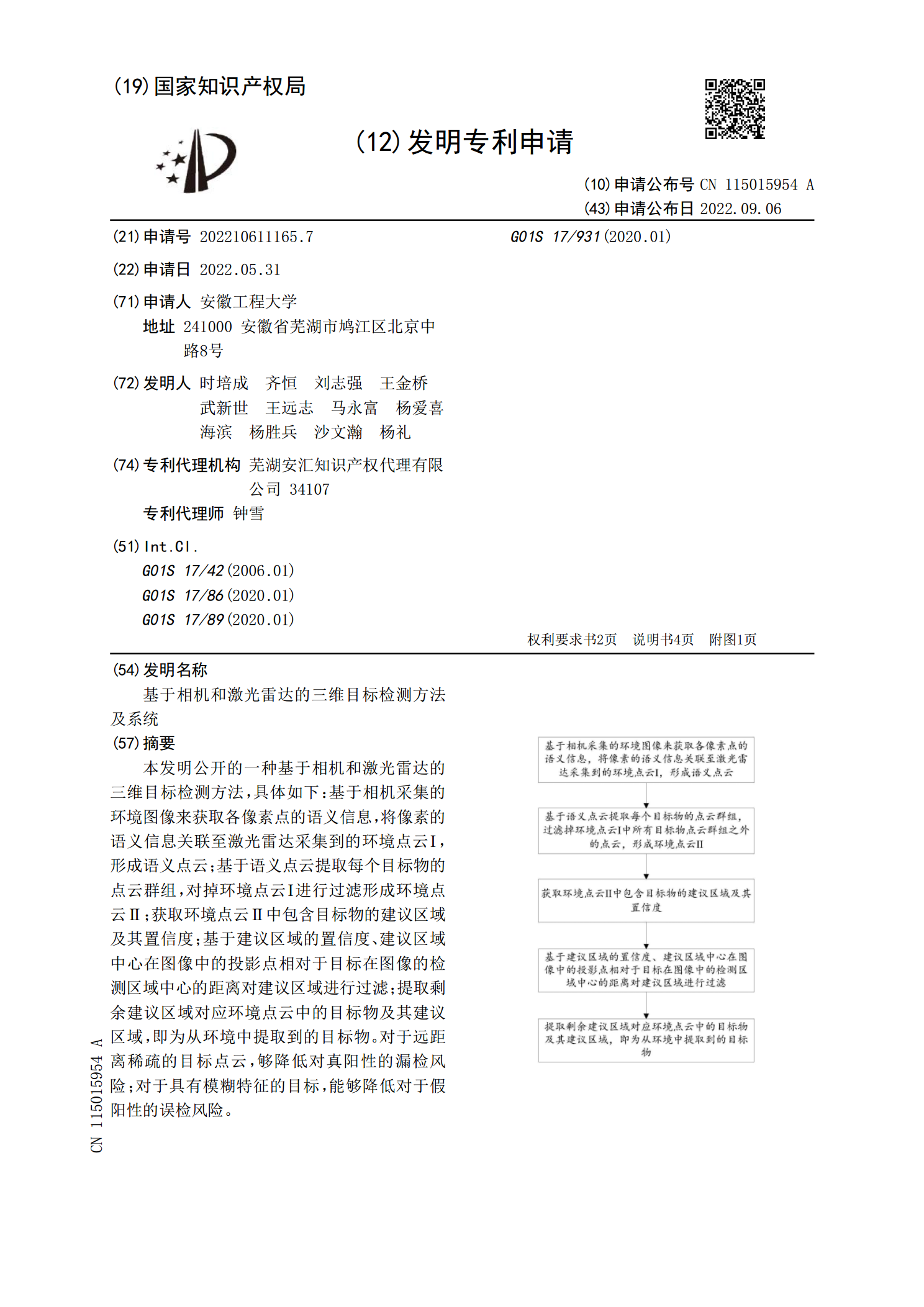
本发明公开的一种基于相机和激光雷达的三维目标检测方法,具体如下:基于相机采集的环境图像来获取各像素点的语义信息,将像素的语义信息关联至激光雷达采集到的环境点云Ⅰ,形成语义点云;基于语义点云提取每个目标物的点云群组,对掉环境点云Ⅰ进行过滤形成环境点云Ⅱ;获取环境点云Ⅱ中包含目标物的建议区域及其置信度;基于建议区域的置信度、建议区域中心在图像中的投影点相对于目标在图像的检测区域中心的距离对建议区域进行过滤;提取剩余建议区域对应环境点云中的目标物及其建议区域,即为从环境中提取到的目标物。对于远距离稀疏的目标点云
基于多相机及激光雷达的目标融合方法及系统.pdf
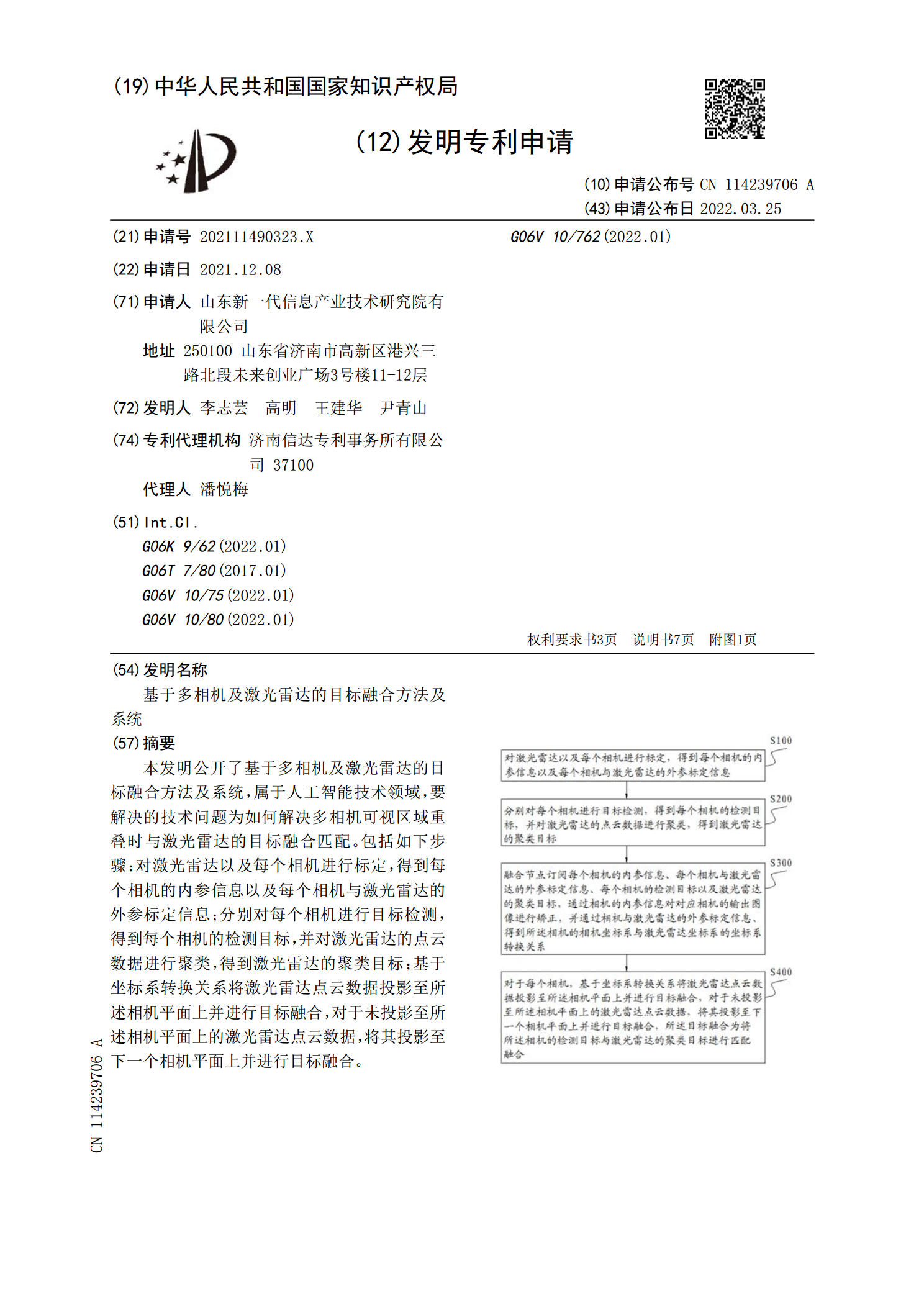
本发明公开了基于多相机及激光雷达的目标融合方法及系统,属于人工智能技术领域,要解决的技术问题为如何解决多相机可视区域重叠时与激光雷达的目标融合匹配。包括如下步骤:对激光雷达以及每个相机进行标定,得到每个相机的内参信息以及每个相机与激光雷达的外参标定信息;分别对每个相机进行目标检测,得到每个相机的检测目标,并对激光雷达的点云数据进行聚类,得到激光雷达的聚类目标;基于坐标系转换关系将激光雷达点云数据投影至所述相机平面上并进行目标融合,对于未投影至所述相机平面上的激光雷达点云数据,将其投影至下一个相机平面上并进