
一种基于U-V视差图的障碍物测距方法.pdf

茂学****23


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于U-V视差图的障碍物测距方法.pdf
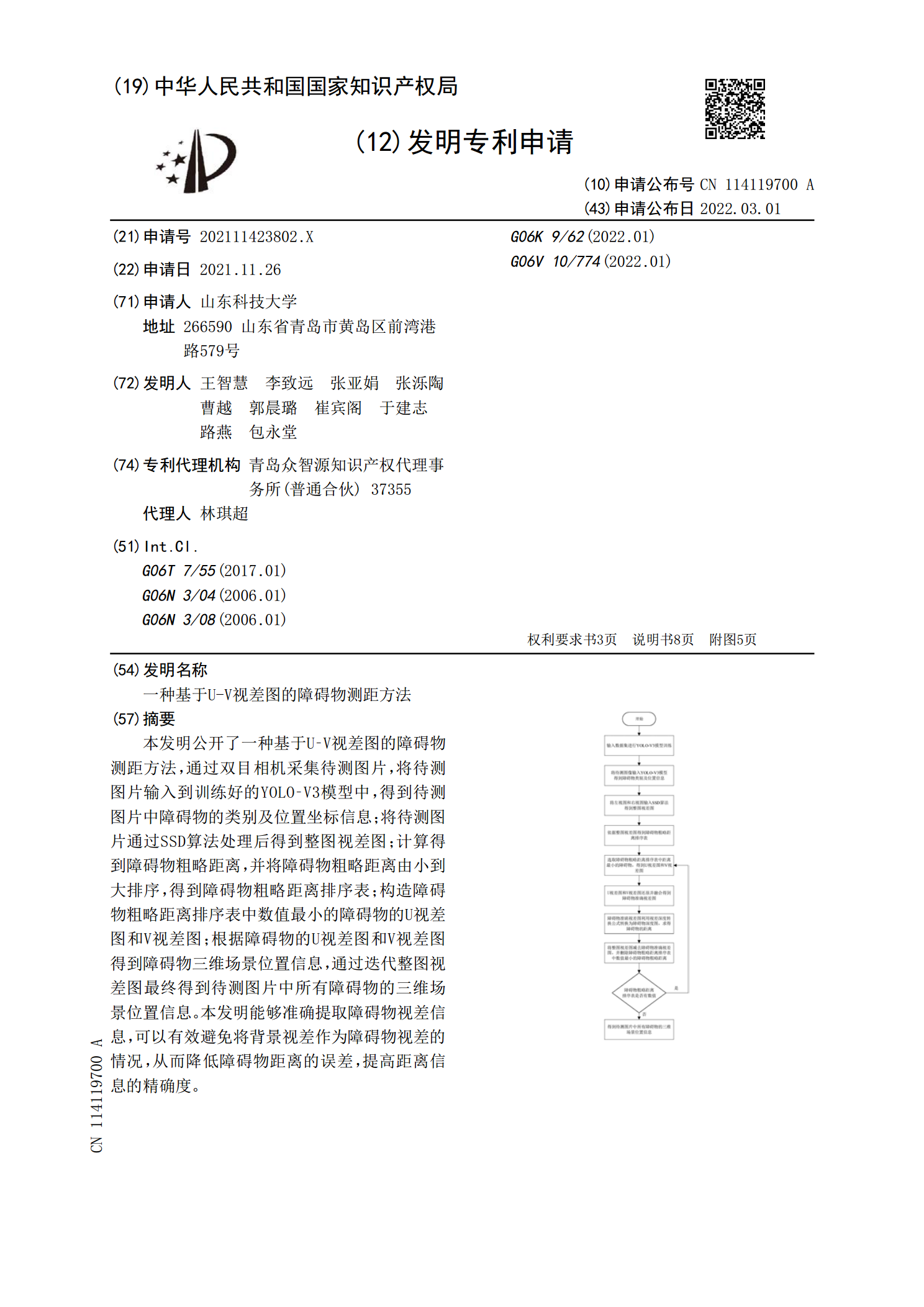
本发明公开了一种基于U‑V视差图的障碍物测距方法,通过双目相机采集待测图片,将待测图片输入到训练好的YOLO‑V3模型中,得到待测图片中障碍物的类别及位置坐标信息;将待测图片通过SSD算法处理后得到整图视差图;计算得到障碍物粗略距离,并将障碍物粗略距离由小到大排序,得到障碍物粗略距离排序表;构造障碍物粗略距离排序表中数值最小的障碍物的U视差图和V视差图;根据障碍物的U视差图和V视差图得到障碍物三维场景位置信息,通过迭代整图视差图最终得到待测图片中所有障碍物的三维场景位置信息。本发明能够准确提取障碍物视差信

基于视差图的未知环境下农田障碍物检测方法.docx
基于视差图的未知环境下农田障碍物检测方法摘要:近年来,无人机已成为农业领域中的重要工具之一,能够提高农业生产效率,同时也面临着检测农田中障碍物的问题。本文针对无人机飞行过程中,在未知环境下检测农田障碍物的问题,提出了一种基于视差图的障碍物检测方法,利用双目相机获取农田地面的三维信息,通过视差图分析方法实现对农田障碍物的检测。实验结果表明,该方法能够有效地检测农田中各种障碍物,为无人机的农业生产提供了一种有效的支持。关键词:无人机;视差图;农田障碍物;检测方法一、介绍随着农业现代化的发展,无人机已经成为农业

基于V-视差的障碍物检测改进方法.docx
基于V-视差的障碍物检测改进方法基于V-视差的障碍物检测改进方法障碍物检测是无人驾驶技术中非常重要的一环。为了在行驶过程中避免与障碍物发生碰撞或者出现其他风险,无人驾驶技术需要实现对周围环境的全面感知和检测。V-视差是一种常用的障碍物检测方法,在不同领域都得到了广泛应用。本文将介绍V-视差算法的原理和缺陷,并提出改进方法来提高V-视差算法的检测效果。V-视差算法原理V-视差算法是一种基于单目摄像头的视觉差异处理技术,它通过摄像头拍摄到的两幅不同视角的图像,计算出物体在图像中的视差信息,然后根据一定的规则来

一种基于随机森林算法的多障碍物超声测距方法.pptx
基于随机森林算法的多障碍物超声测距方法01添加章节标题随机森林算法原理随机森林算法简介随机森林算法的优点随机森林算法在多障碍物超声测距中的应用多障碍物超声测距系统设计系统硬件组成系统软件设计超声波传感器选择与布置数据采集与处理流程随机森林算法训练与模型建立训练数据集的构建特征选择与提取随机森林模型训练模型评估与优化多障碍物超声测距实验与分析实验环境与条件实验过程与数据采集实验结果分析结果比较与讨论结论与展望本研究的主要贡献存在的不足与局限性未来研究展望感谢观看
一种基于双目视觉的深度学习障碍物测距方法.pdf
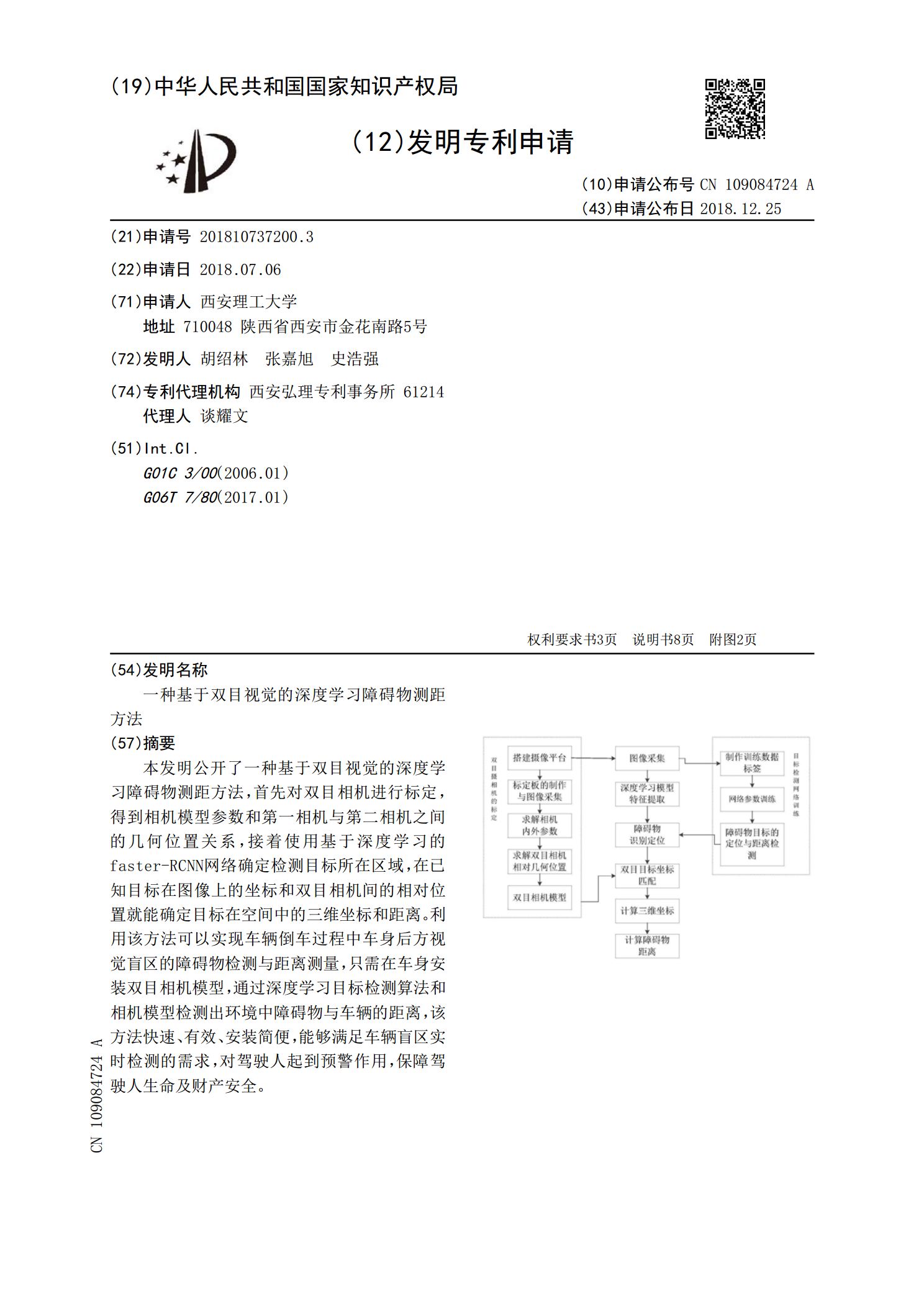
本发明公开了一种基于双目视觉的深度学习障碍物测距方法,首先对双目相机进行标定,得到相机模型参数和第一相机与第二相机之间的几何位置关系,接着使用基于深度学习的faster‑RCNN网络确定检测目标所在区域,在已知目标在图像上的坐标和双目相机间的相对位置就能确定目标在空间中的三维坐标和距离。利用该方法可以实现车辆倒车过程中车身后方视觉盲区的障碍物检测与距离测量,只需在车身安装双目相机模型,通过深度学习目标检测算法和相机模型检测出环境中障碍物与车辆的距离,该方法快速、有效、安装简便,能够满足车辆盲区实时检测的需