
图像处理方法、装置、电子设备和介质.pdf

努力****幻翠

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
图像处理方法、图像处理装置、电子设备和存储介质.pdf
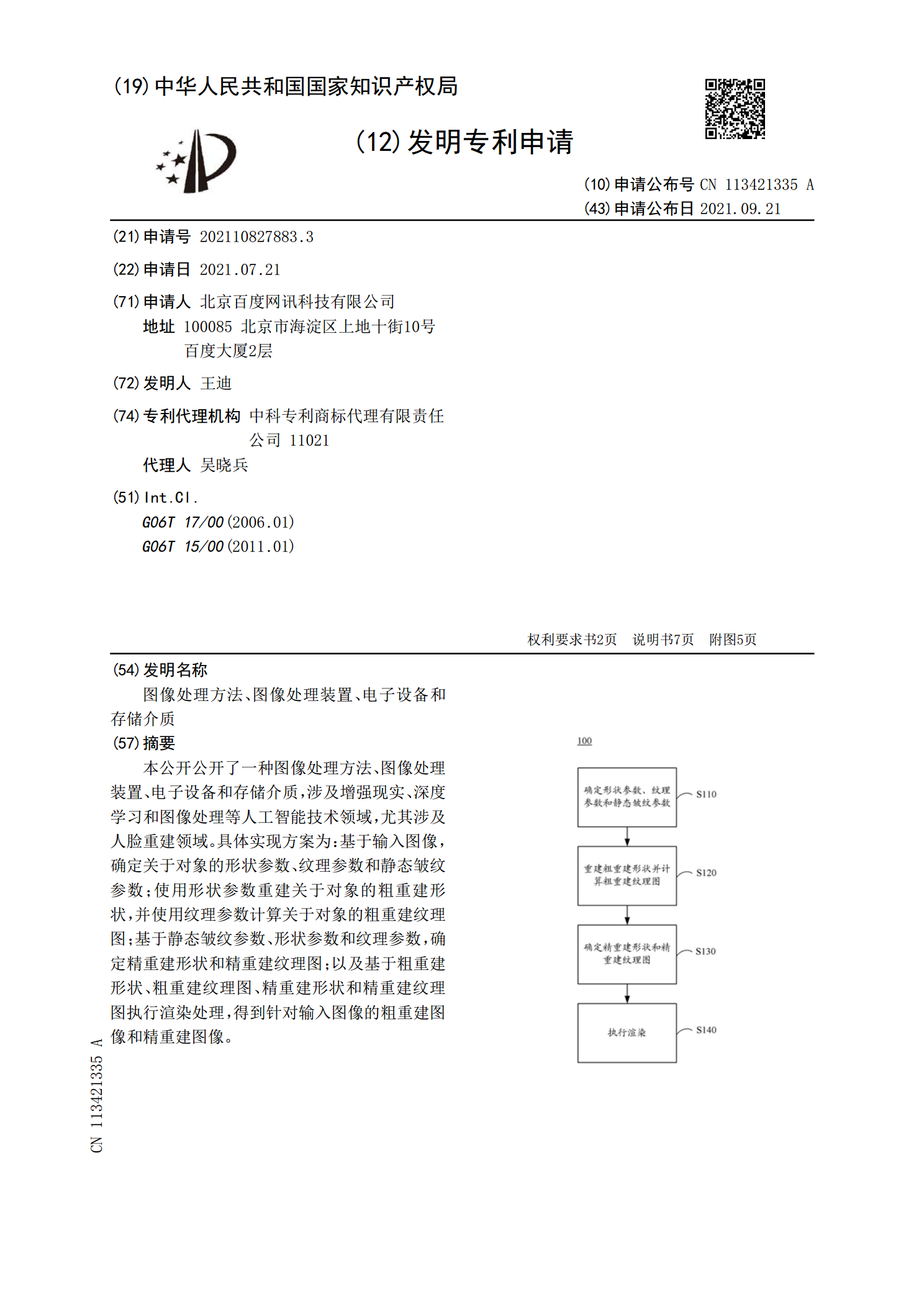
本公开公开了一种图像处理方法、图像处理装置、电子设备和存储介质,涉及增强现实、深度学习和图像处理等人工智能技术领域,尤其涉及人脸重建领域。具体实现方案为:基于输入图像,确定关于对象的形状参数、纹理参数和静态皱纹参数;使用形状参数重建关于对象的粗重建形状,并使用纹理参数计算关于对象的粗重建纹理图;基于静态皱纹参数、形状参数和纹理参数,确定精重建形状和精重建纹理图;以及基于粗重建形状、粗重建纹理图、精重建形状和精重建纹理图执行渲染处理,得到针对输入图像的粗重建图像和精重建图像。
图像处理方法、图像处理装置、存储介质和电子设备.pdf
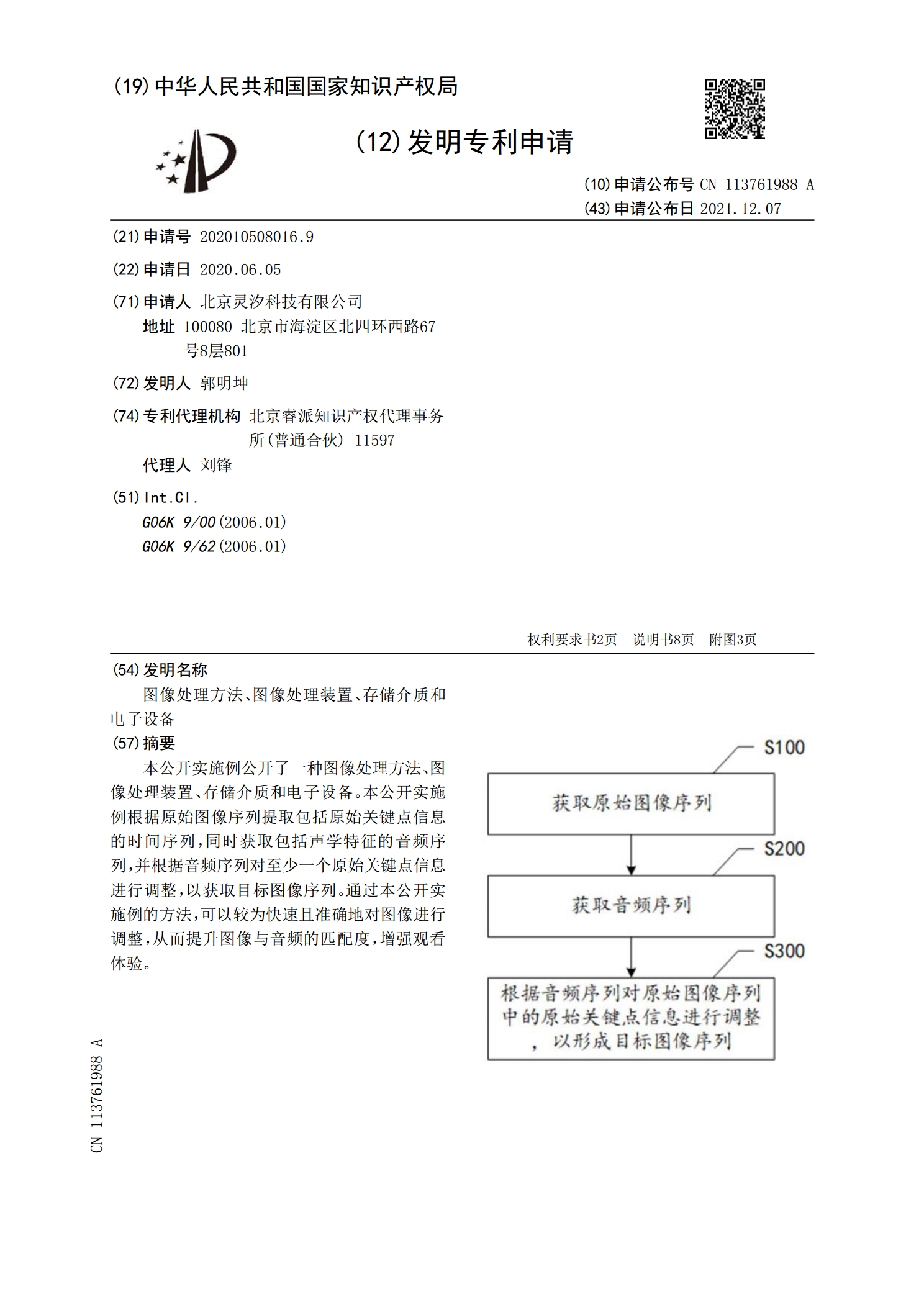
本公开实施例公开了一种图像处理方法、图像处理装置、存储介质和电子设备。本公开实施例根据原始图像序列提取包括原始关键点信息的时间序列,同时获取包括声学特征的音频序列,并根据音频序列对至少一个原始关键点信息进行调整,以获取目标图像序列。通过本公开实施例的方法,可以较为快速且准确地对图像进行调整,从而提升图像与音频的匹配度,增强观看体验。

图像处理方法、图像处理装置、电子设备和存储介质.pdf
一种图像处理方法、图像处理装置、电子装置、非瞬时性计算机可读存储介质。图像处理方法包括:获取输入图像,其中,输入图像包括M个字符行;对输入图像进行全局校正处理,以得到中间校正图像;对中间校正图像进行局部调整,以得到目标校正图像。对中间校正图像进行局部调整,以得到目标校正图像,包括:根据中间校正图像,确定与M个字符行对应的M个字符行下边界;基于中间校正图像和M个字符行下边界,确定局部调整基准线和M个保留系数组;根据M个字符行下边界、局部调整基准线和M个保留系数组,确定与M个字符行对应的M个局部调整偏移量组;
图像处理方法、装置、电子设备和介质.pdf
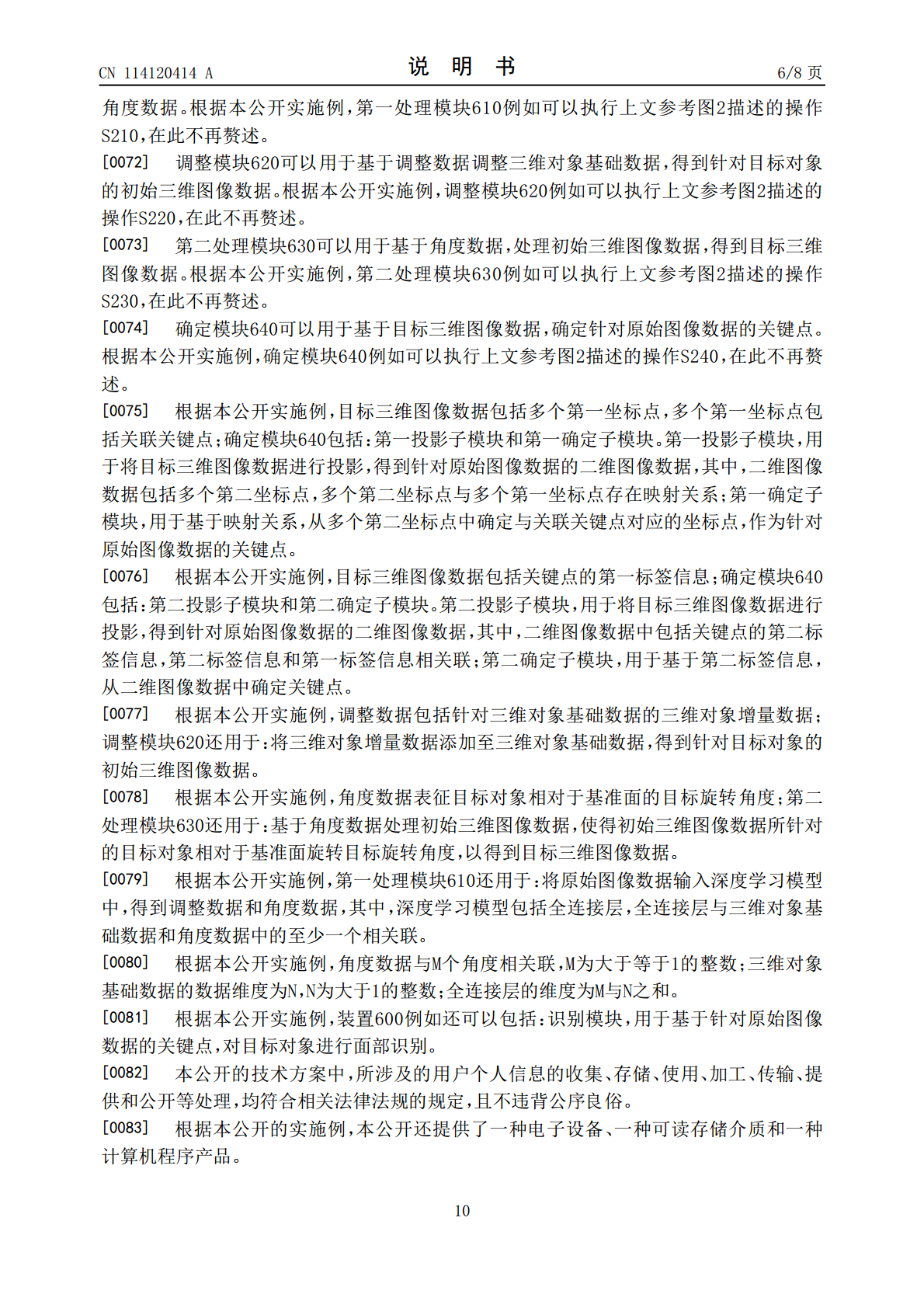
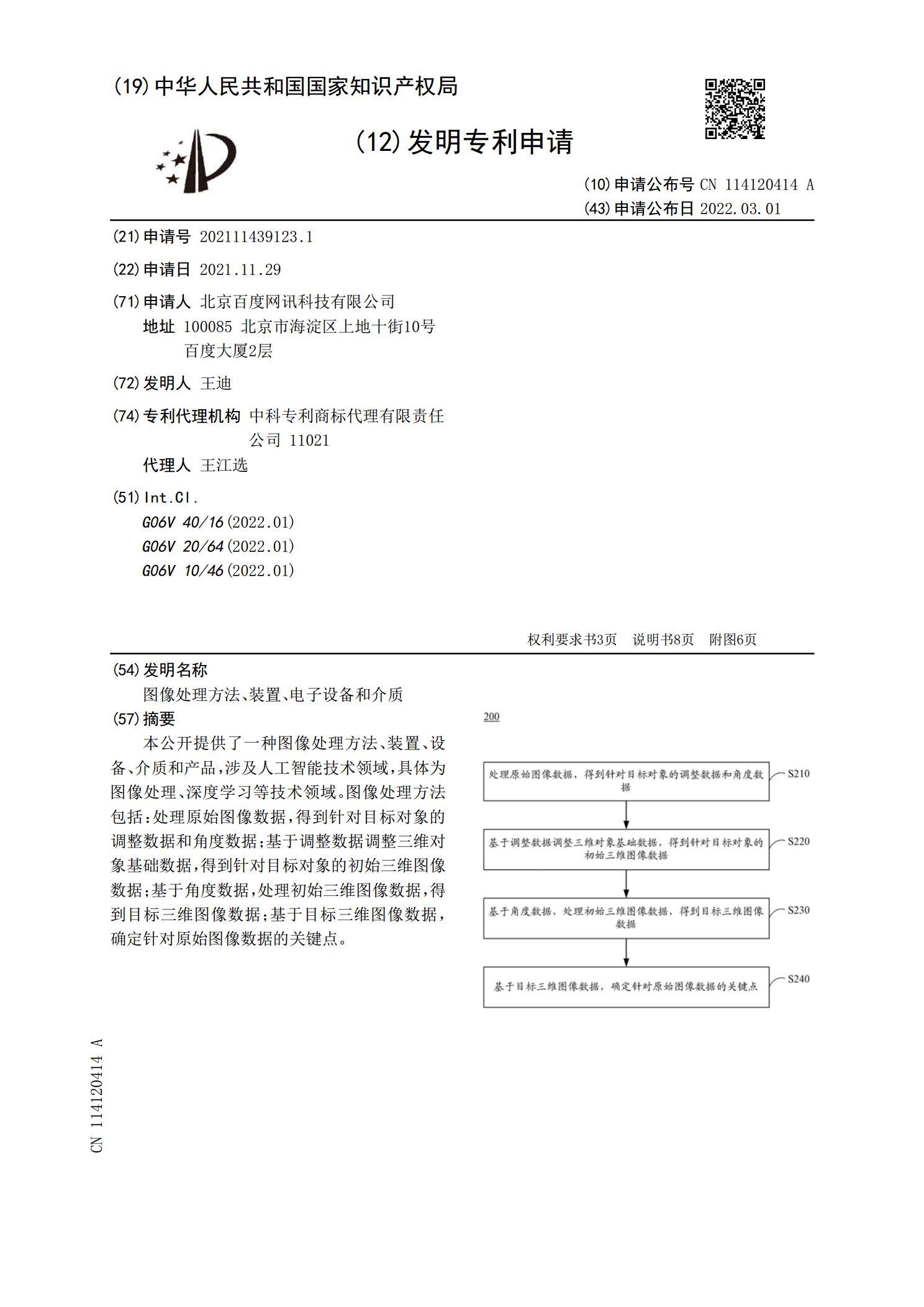
本公开提供了一种图像处理方法、装置、设备、介质和产品,涉及人工智能技术领域,具体为图像处理、深度学习等技术领域。图像处理方法包括:处理原始图像数据,得到针对目标对象的调整数据和角度数据;基于调整数据调整三维对象基础数据,得到针对目标对象的初始三维图像数据;基于角度数据,处理初始三维图像数据,得到目标三维图像数据;基于目标三维图像数据,确定针对原始图像数据的关键点。
图像处理方法、装置、电子设备和介质.pdf
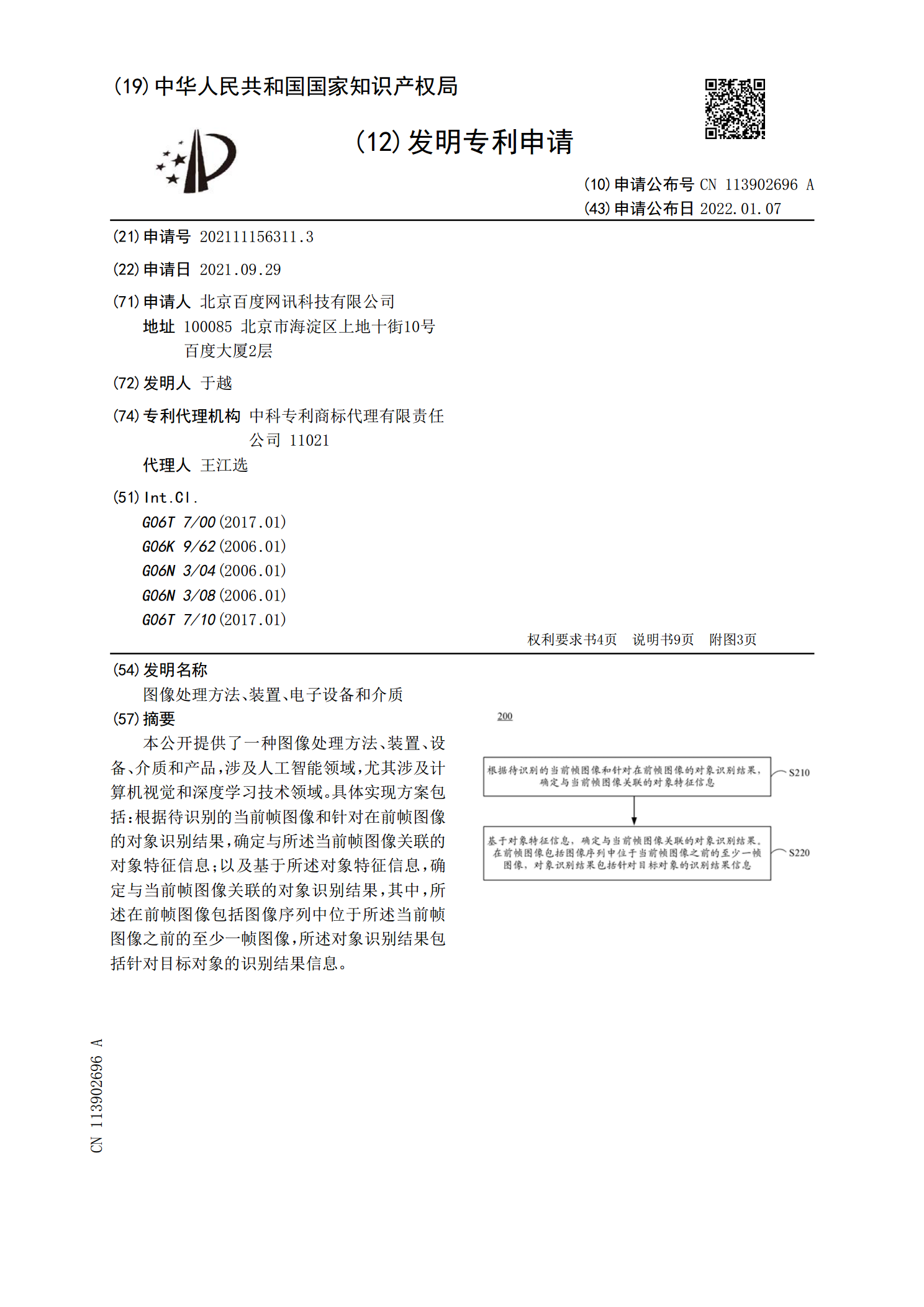
本公开提供了一种图像处理方法、装置、设备、介质和产品,涉及人工智能领域,尤其涉及计算机视觉和深度学习技术领域。具体实现方案包括:根据待识别的当前帧图像和针对在前帧图像的对象识别结果,确定与所述当前帧图像关联的对象特征信息;以及基于所述对象特征信息,确定与当前帧图像关联的对象识别结果,其中,所述在前帧图像包括图像序列中位于所述当前帧图像之前的至少一帧图像,所述对象识别结果包括针对目标对象的识别结果信息。