
一种基于仿射因子补偿的改进ICCP方法.pdf

努力****南绿

1/10
2/10

3/10
4/10
5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于仿射因子补偿的改进ICCP方法.pdf
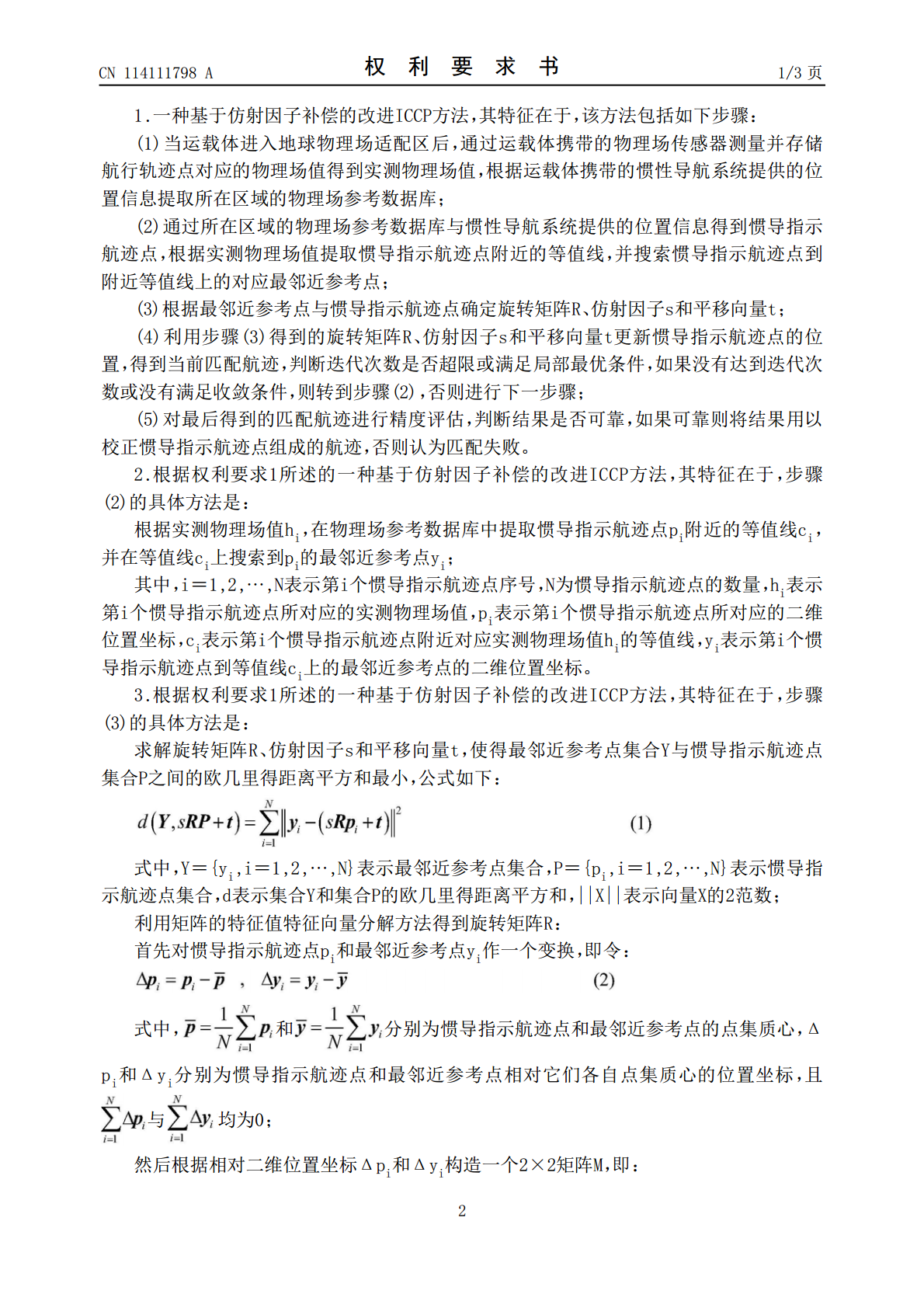
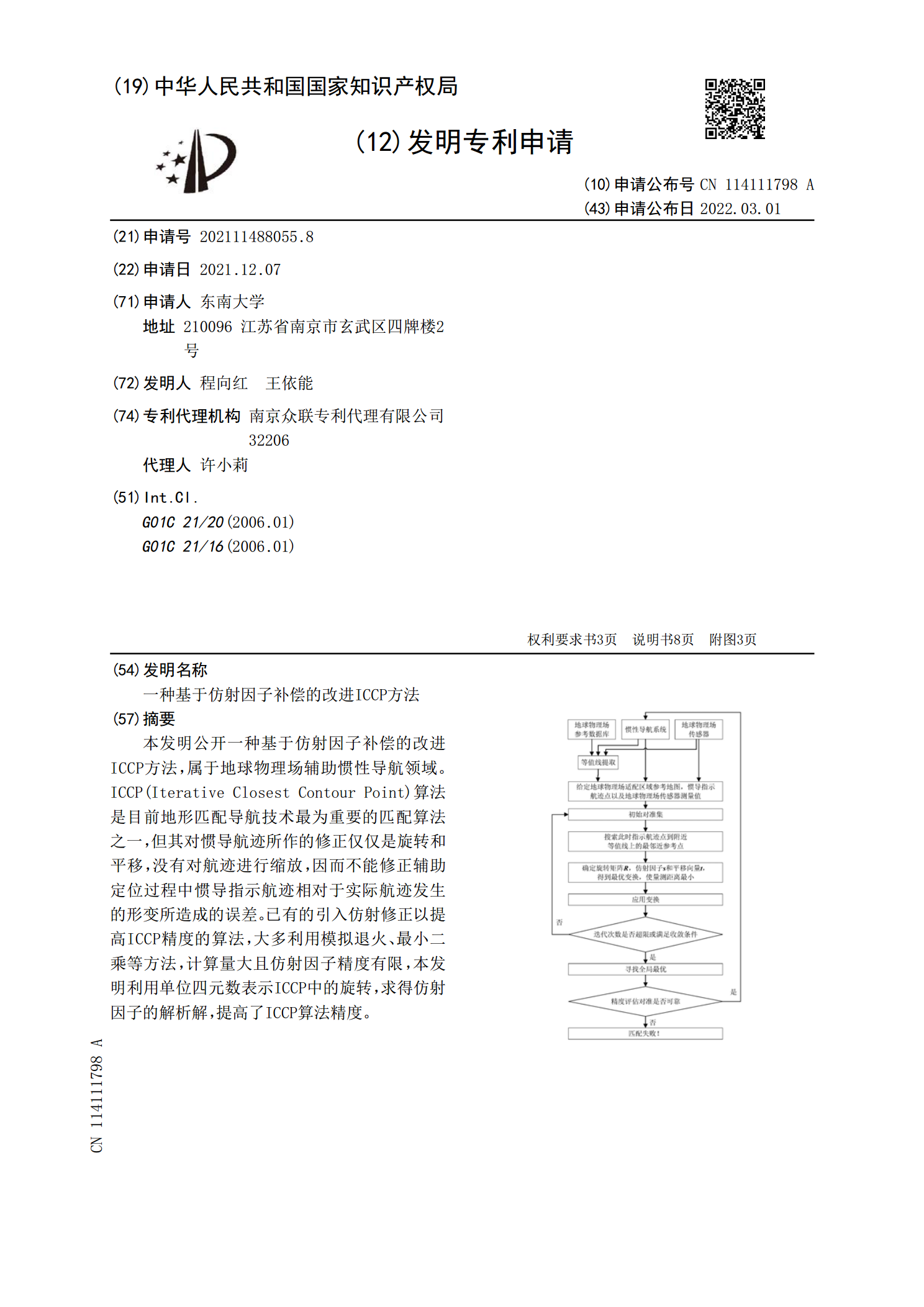
本发明公开一种基于仿射因子补偿的改进ICCP方法,属于地球物理场辅助惯性导航领域。ICCP(IterativeClosestContourPoint)算法是目前地形匹配导航技术最为重要的匹配算法之一,但其对惯导航迹所作的修正仅仅是旋转和平移,没有对航迹进行缩放,因而不能修正辅助定位过程中惯导指示航迹相对于实际航迹发生的形变所造成的误差。已有的引入仿射修正以提高ICCP精度的算法,大多利用模拟退火、最小二乘等方法,计算量大且仿射因子精度有限,本发明利用单位四元数表示ICCP中的旋转,求得仿射因子的解析
一种基于仿射不变量的符号识别方法.pdf
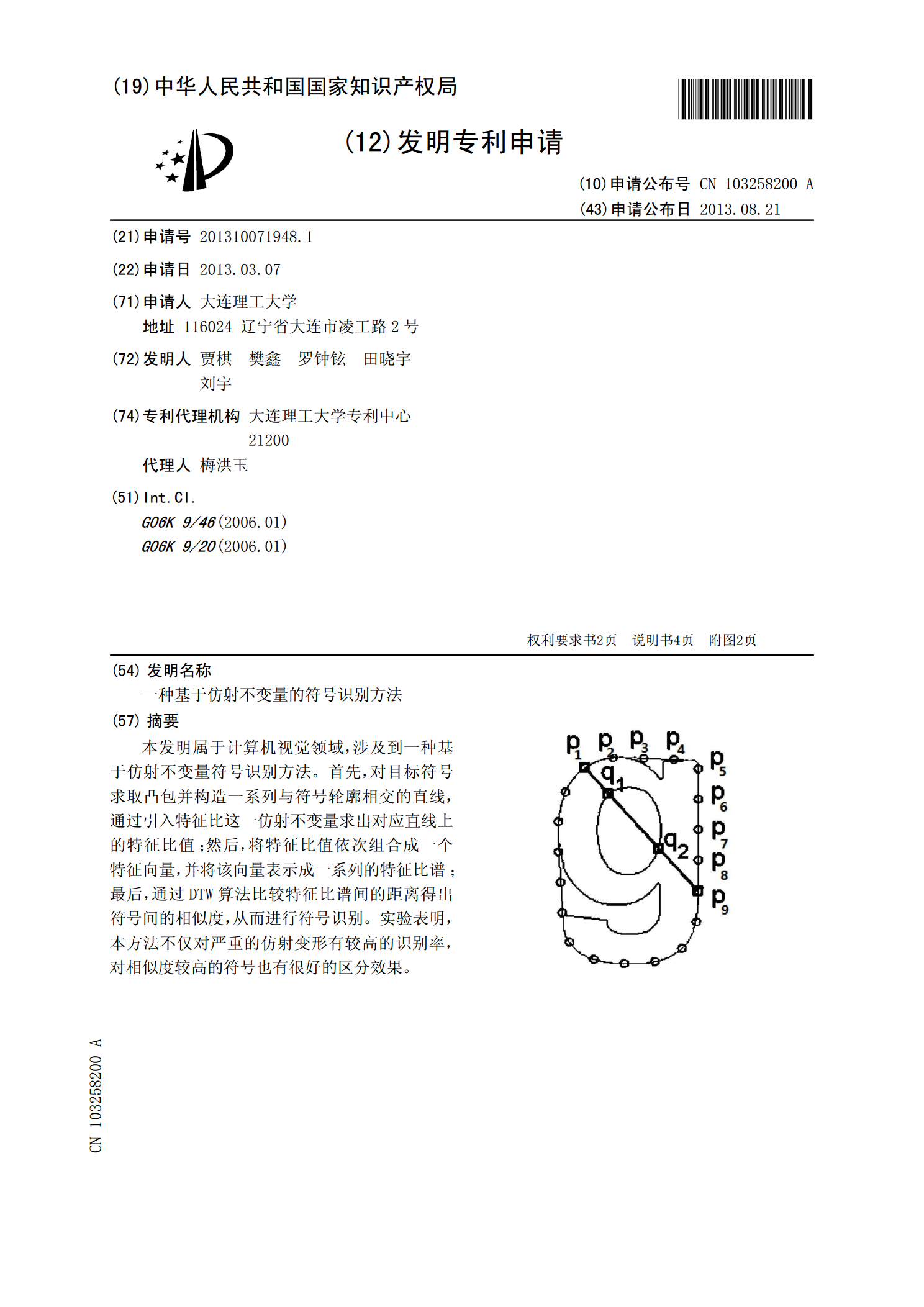
本发明属于计算机视觉领域,涉及到一种基于仿射不变量符号识别方法。首先,对目标符号求取凸包并构造一系列与符号轮廓相交的直线,通过引入特征比这一仿射不变量求出对应直线上的特征比值;然后,将特征比值依次组合成一个特征向量,并将该向量表示成一系列的特征比谱;最后,通过DTW算法比较特征比谱间的距离得出符号间的相似度,从而进行符号识别。实验表明,本方法不仅对严重的仿射变形有较高的识别率,对相似度较高的符号也有很好的区分效果。

基于大型仿射编码的白盒AES加密方法.pdf
本发明公开了一种基于大型仿射编码的白盒AES加密方法,其步骤包括:1.构造外部输入编码;2.构建两个仿射变换函数;3.生成解码表De;4.从高级加密标准AES的状态矩阵中随机选取未选过的一列状态向量;5.构建三个仿射变换函数;6.生成加密表MSK;7.判断是否选完高级加密标准AES的状态矩阵中所有的列向量;8.构建一个仿射变换函数;9.生成移位表SR;10.生成了用来在白盒环境下执行高级加密标准AES一轮加密所需的48张查找表。本发明采用大型仿射编码保护查找表,通过查表进行数据加密,不会泄露中间值,使得本

基于轮廓分割的仿射不变特征提取方法.pdf
一种基于轮廓分割的仿射不变特征提取方法,属于计算机视觉技术领域。步骤为:提取形状轮廓,再形状轮廓进行等面积采样;以轮廓起点作为分割起点,逆时针将轮廓进行等点数分割为K部分,得到K个分割点,连接分割起点与各分割点使得形状被分为K个区域,并依次计算各区域的面积,组成一个有序数列,直到按顺序遍历全部的轮廓点,得到每个轮廓点对应的面积有序数列组成一个矩阵,其中行数为K,列数为轮廓点数。将该矩阵使用形状面积正规化得到形状签名矩阵;形状签名矩阵的每一行都是一个离散函数,应用离散傅里叶变换,使用变换系数的幅度值做为结果
一种基于仿射变换的水下色偏图像清晰化方法.pdf
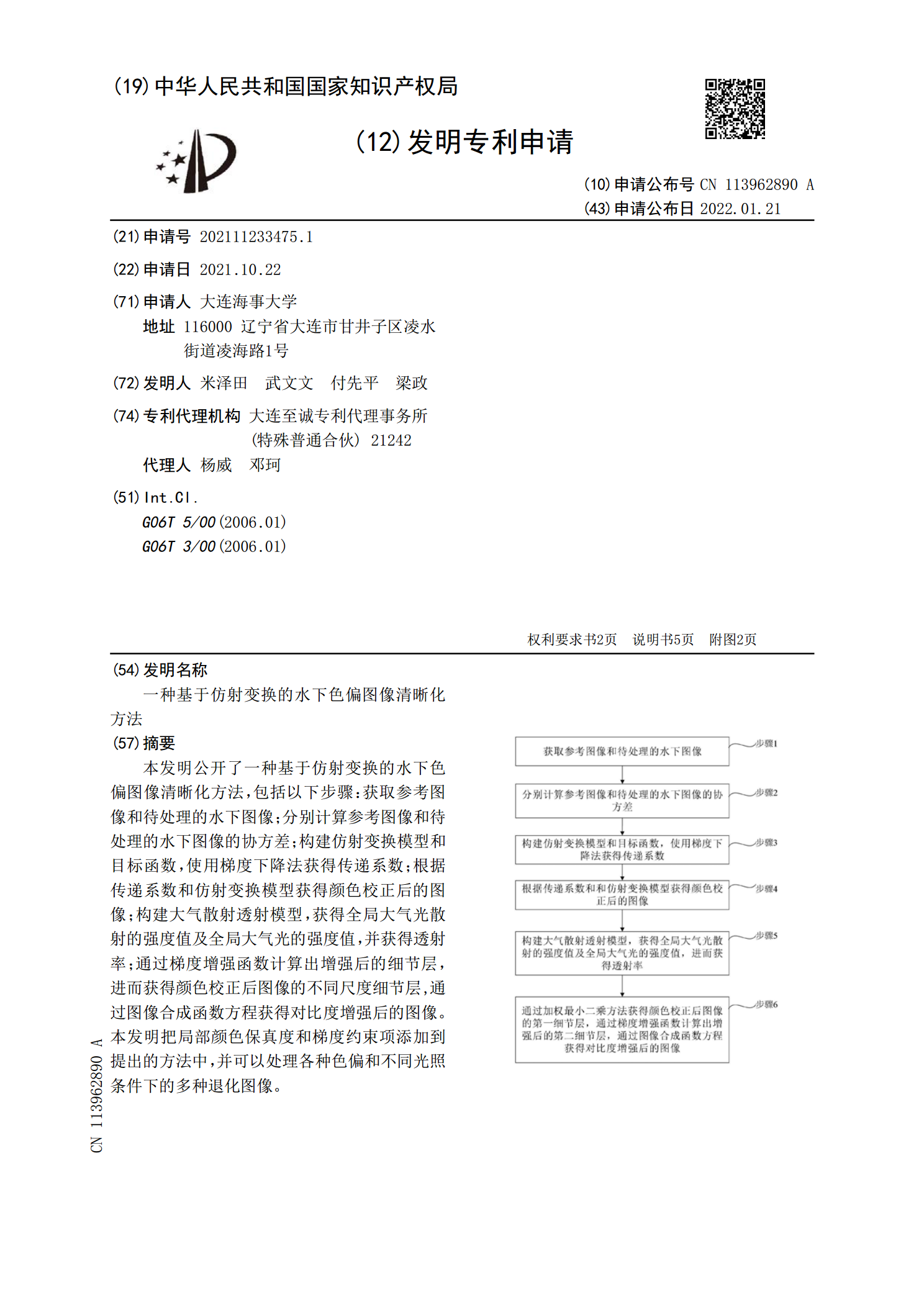
本发明公开了一种基于仿射变换的水下色偏图像清晰化方法,包括以下步骤:获取参考图像和待处理的水下图像;分别计算参考图像和待处理的水下图像的协方差;构建仿射变换模型和目标函数,使用梯度下降法获得传递系数;根据传递系数和仿射变换模型获得颜色校正后的图像;构建大气散射透射模型,获得全局大气光散射的强度值及全局大气光的强度值,并获得透射率;通过梯度增强函数计算出增强后的细节层,进而获得颜色校正后图像的不同尺度细节层,通过图像合成函数方程获得对比度增强后的图像。本发明把局部颜色保真度和梯度约束项添加到提出的方法中,并