
一种基于GPS和AprilTag的视觉辅助无人机降落的设备与方法.pdf

一只****ng


1/10

2/10
3/10
4/10
5/10

6/10
7/10
8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于GPS和AprilTag的视觉辅助无人机降落的设备与方法.pdf
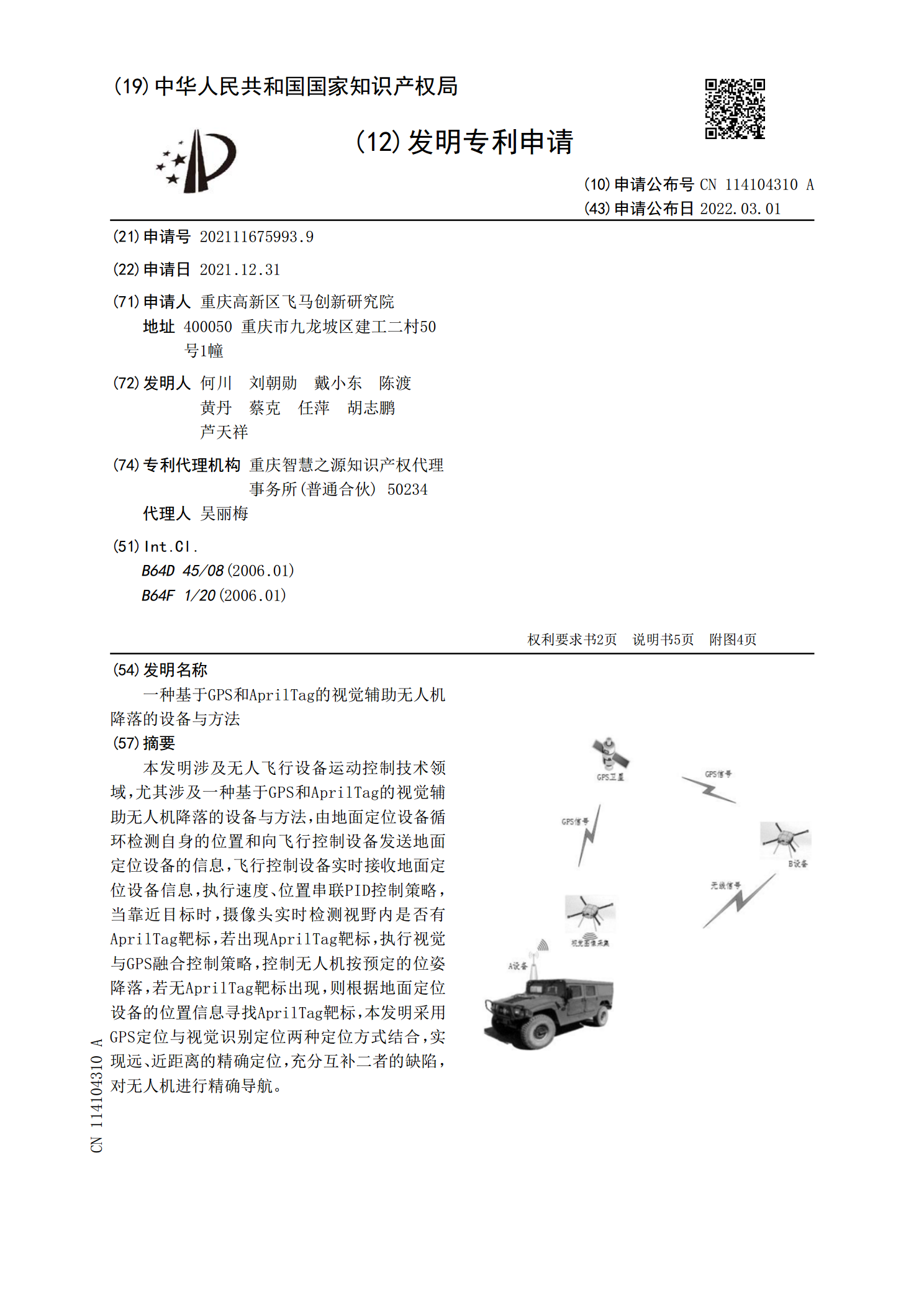
本发明涉及无人飞行设备运动控制技术领域,尤其涉及一种基于GPS和AprilTag的视觉辅助无人机降落的设备与方法,由地面定位设备循环检测自身的位置和向飞行控制设备发送地面定位设备的信息,飞行控制设备实时接收地面定位设备信息,执行速度、位置串联PID控制策略,当靠近目标时,摄像头实时检测视野内是否有AprilTag靶标,若出现AprilTag靶标,执行视觉与GPS融合控制策略,控制无人机按预定的位姿降落,若无AprilTag靶标出现,则根据地面定位设备的位置信息寻找AprilTag靶标,本发明采用GPS定位

基于Apriltag的无人机降落方法、装置、介质和电子设备.pdf
本发明涉及一种基于Apriltag的无人机降落方法、装置、存储介质以及电子设备,该方法包括:获取无人机对目标降落中心点拍摄的当前帧图像,并识别获得Apriltag标签。计算无人机相对于Apriltag标签的位置偏移量,并对位置偏移量的计算过程进行计时。若计算过程的计时时长超过预设时长,获取当前帧图像之前的预设数量帧图像。根据预设数量帧图像,获得对应的预设数量的位置偏移量。利用二次指数平滑方法对预设数量的位置偏移量进行拟合,建立位置偏移量预测模型,预测获得当前帧图像对应的位置偏移量。根据所述当前帧图像对应的

基于光学视觉辅助无人机自主降落研究综述.pptx
汇报人:CONTENTS添加章节标题引言研究背景研究意义研究目的光学视觉辅助无人机自主降落技术概述无人机自主降落技术简介光学视觉辅助无人机自主降落技术原理光学视觉辅助无人机自主降落技术发展历程光学视觉系统在无人机自主降落中的应用无人机视觉系统概述无人机视觉系统在自主降落中的应用无人机视觉系统关键技术基于深度学习的无人机自主降落技术深度学习在无人机自主降落中的应用深度学习算法在无人机自主降落中的实现深度学习算法在无人机自主降落中的优化无人机自主降落技术实验与验证实验平台与实验环境实验方法与实验过程实验结果与

一种基于单目视觉的无人机自主降落方法.pdf
本发明公开了一种基于单目视觉的无人机自主降落方法本发明先生成一大一小内外嵌套的ArucoMarker,将其固定在无人降落平台上;无人机通过GPS导航飞至无人降落平台附近并悬停至第一阶段降落高度,执行第一阶段视觉降落算法,直到无人机相对于降落标志中心偏移量小于通过VP‑CND控制方法设定的时变阈值函数后垂直降落至第二阶段指定高度;执行第二阶段视觉降落算法,直到无人机相对于降落标志中心偏移量小于通过VP‑CND控制方法设定的时变阈值函数后垂直下降至无人降落平台。本发明既保证了降落的速度,也保证了降落的精度,消

一种无人机群辅助降落方法.pdf
本发明提供了一种无人机群辅助降落方法,属于无人机辅助降落技术领域。单个无人机的降落方案应用与无人机群降落时,会因无人机合作标志不统一,导致无人机群降落管理困难。在辅助降落合作标志周围设置多个辅助编码合作标志,形成具有不同特征的降落平台,采集降落平台图案存储在目标库中,在无人机群辅助降落时,无人机上的相机采集地面景象与辅助降落合作标志图案匹配检测,查找降落平台,通过检测辅助降落合作标志周围的辅助编码合作标志,确定指定降落平台,进而实现指定降落。本方法可实现无人机群按照任务需要统一管理无人机的降落,降低无人机