
一种雷达信号处理机目标测量的数学建模方法.pdf

是你****深呀


1/10
2/10
3/10

4/10

5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种雷达信号处理机目标测量的数学建模方法.pdf
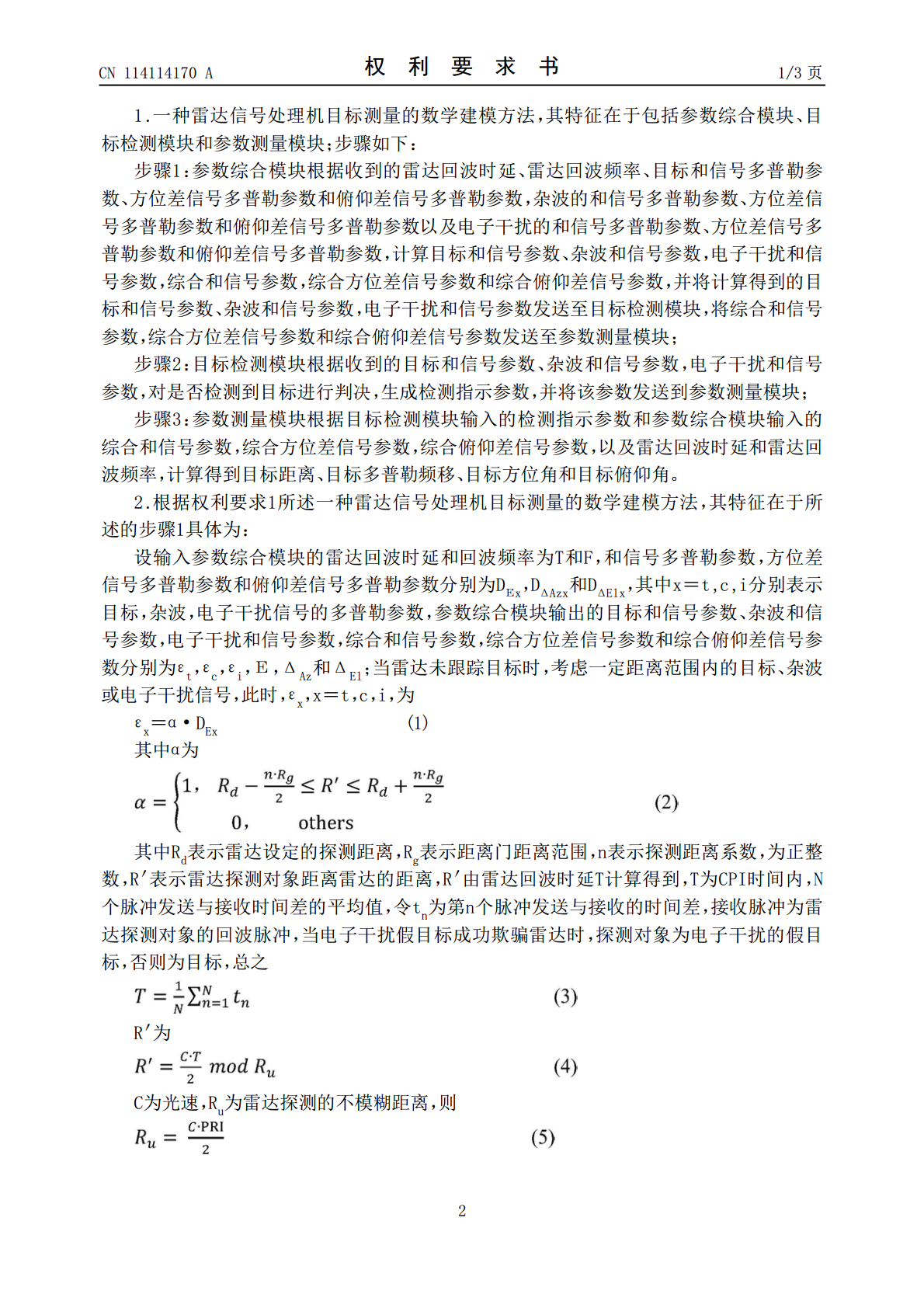
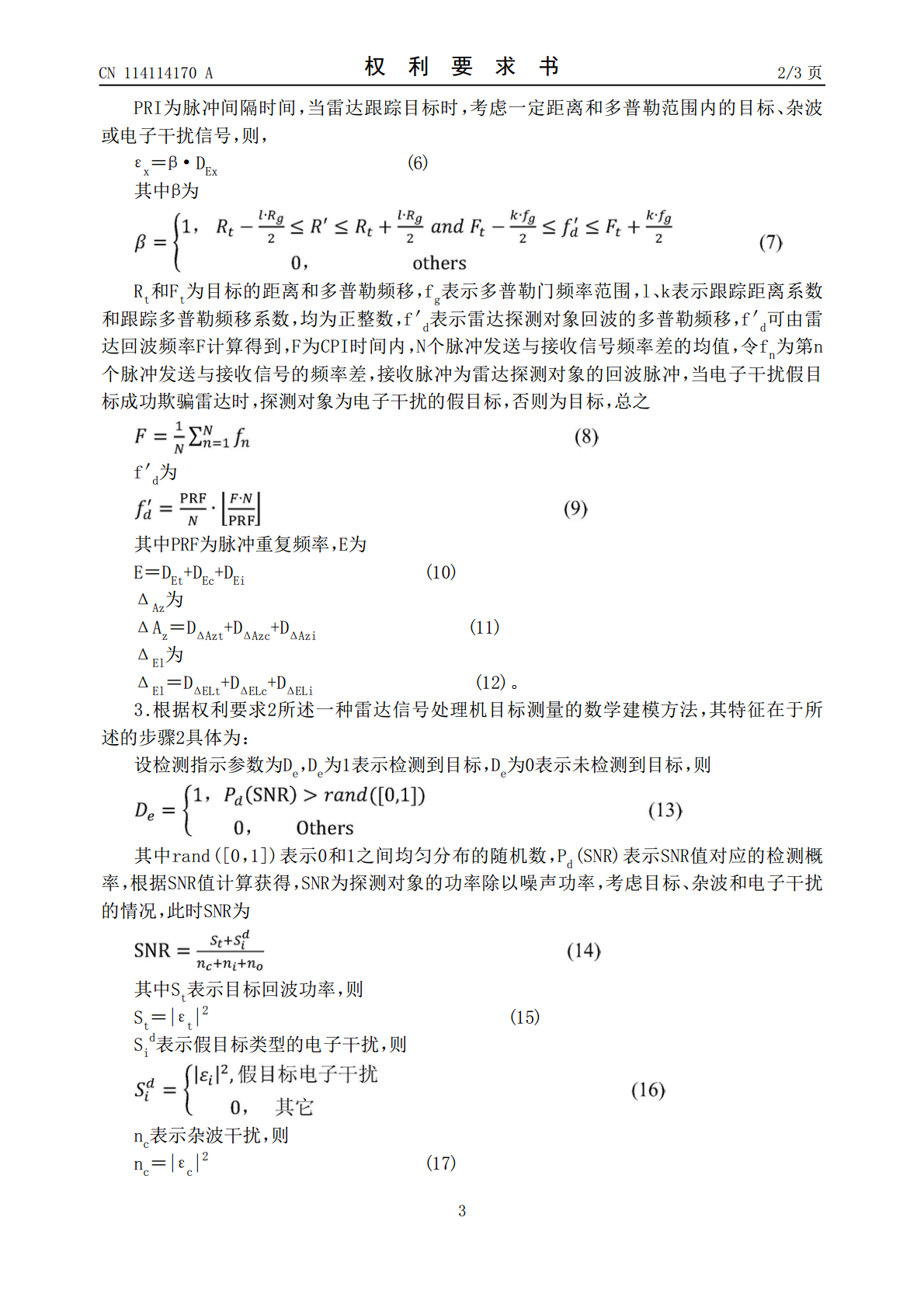
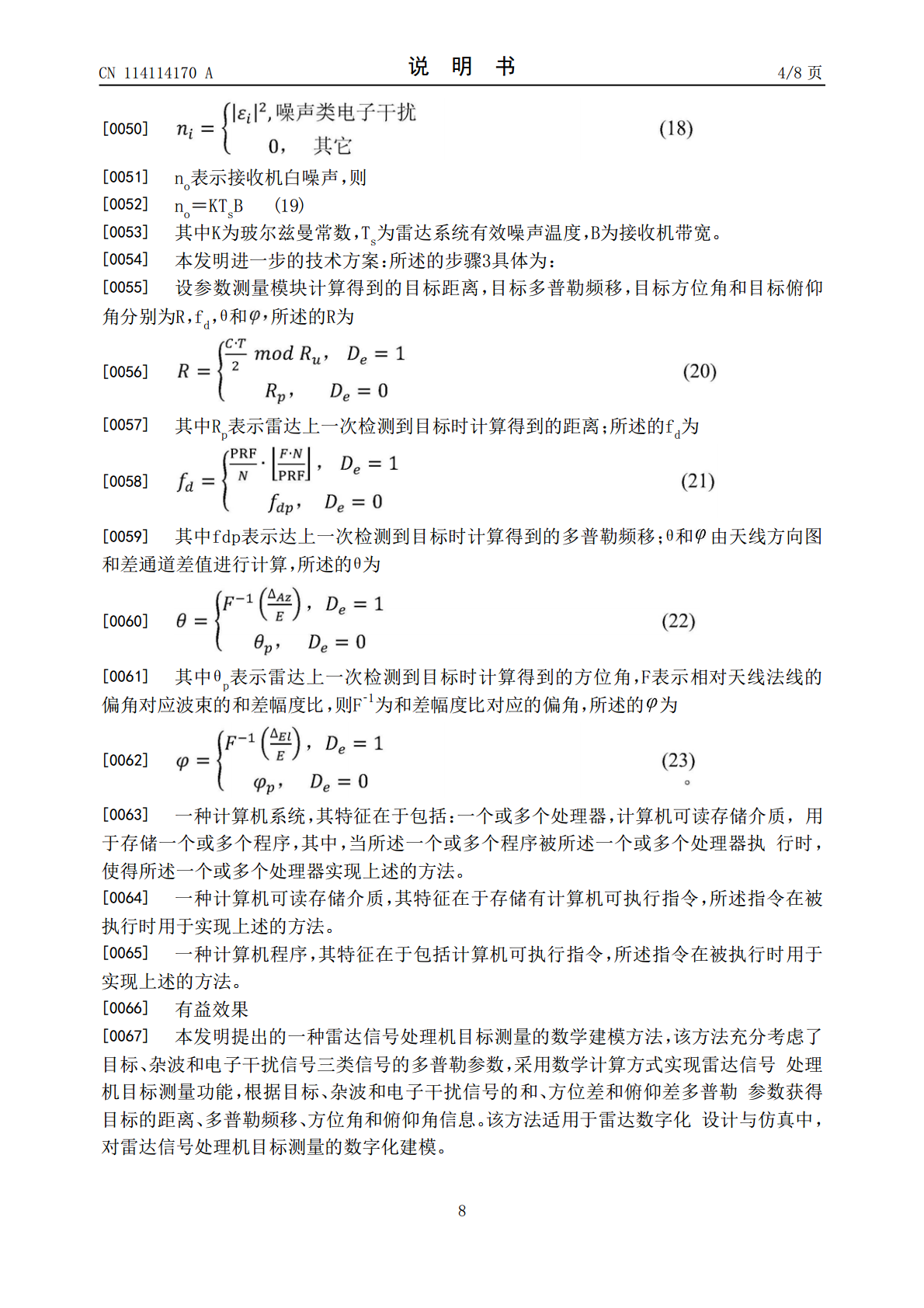
本发明涉及一种雷达信号处理机目标测量的数学建模方法,属于雷达数字化建模与仿真技术领域。该方法充分考虑了目标、杂波和电子干扰信号三类信号的多普勒参数,采用数学计算方式实现雷达信号处理机目标测量功能,根据目标、杂波和电子干扰信号的和、方位差和俯仰差多普勒参数获得目标的距离、多普勒频移、方位角和俯仰角信息。该方法适用于雷达数字化设计与仿真中,对雷达信号处理机目标测量的数字化建模。

一种雷达信号处理机跟踪滤波的数学建模方法.pdf
本发明涉及一种雷达信号处理机跟踪滤波的数学建模方法,属于雷达数字化建模与仿真技术领域。针对雷达数字化建模与仿真的雷达信号处理机数学模型的构建,提出了基于αβ滤波的雷达信号处理机跟踪滤波的数学建模方法。该方法充分考虑了目标跟踪和记忆跟踪状态时目标距离、多普勒频移、目标方位角和俯仰角参数变化,采用数学计算方式实现雷达信号处理机跟踪滤波功能,根据目标距离测量值、目标多普勒频移测量值、目标方位角测量值和目标俯仰角测量值计算得到目标距离、目标多普勒频移、目标方位角和目标俯仰角。该方法适用于雷达数字化设计与仿真中,对

一种雷达信号处理机脉冲多普勒处理的数学建模方法.pdf
本发明涉及一种雷达信号处理机脉冲多普勒处理的数学建模方法,属于雷达数字化建模与仿真技术领域。该方法充分考虑了目标、杂波和电子干扰信号的脉冲压缩参数,采用数字化方式实现雷达信号处理机脉冲多普勒处理功能,将目标、杂波和电子干扰信号的和、方位差和俯仰差脉冲压缩参数转换成脉冲多普勒处理后的信号参数。该方法适用于雷达数字化建模与仿真中,对雷达信号处理机脉冲多普勒处理的数字化建模。

一种雷达信号处理机脉冲压缩处理的数学建模方法.pdf
本发明涉及一种雷达信号处理机脉冲压缩处理的数学建模方法,属于雷达数字化建模与仿真技术领域。该方法充分考虑了回波环境中存在的目标、杂波和电子干扰的雷达信号,采用数字化方式实现雷达信号处理机脉冲压缩功能,将目标、杂波和电子干扰的和、方位差和俯仰差信号参数转换成脉压后的信号参数。该方法适用于雷达数字化建模与仿真中,对雷达信号处理机脉冲压缩处理的数字化建模。

一种前向散射雷达地面运动目标信号建模及成像方法.pdf
本发明涉及一种运动目标前向散射信号建模及成像的信号处理方法,属于雷达信号处理技术领域。本发明所提出的方法考虑地面反射、大衍射角以及目标运动方向较为随机等实际情况,建立了精确的地面运动目标前向散射信号模型,修正了SISAR成像算法,并对目标像进行了更为精确的估计。修正后的成像算法在大衍射角、目标斜穿基线和多径干涉情况下依然可以获得精确的目标像,这些目标像与目标真实轮廓形状非常接近,可有效地对不同形状的目标进行分类识别。