
一种基于图像语义分割网络的空间距离预测方法及系统.pdf

盼易****君a


1/10

2/10
3/10

4/10
5/10

6/10

7/10
8/10

9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于图像语义分割网络的空间距离预测方法及系统.pdf
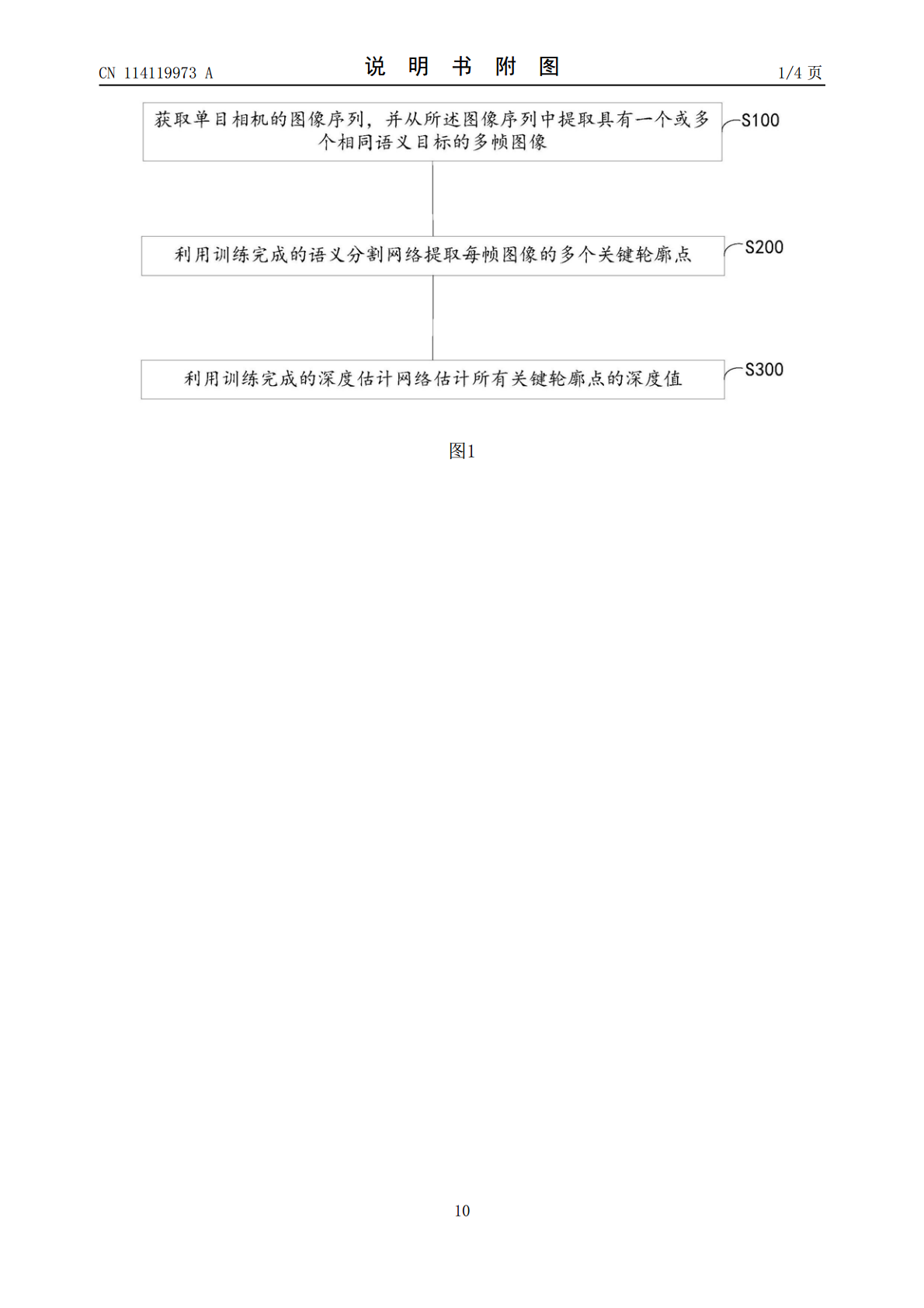
本发明涉及一种基于图像语义分割网络的空间距离预测方法及系统,其方法包括:获取单目相机的图像序列,并从所述图像序列中提取具有一个或多个相同语义目标的多帧图像;利用训练完成的语义分割网络提取每帧图像的多个关键轮廓点;利用训练完成的深度估计网络估计所有关键轮廓点的深度值。本发明结合了语义分割网络和深度估计网络来预测空间距离,能够实时提供制图所需的地图要素三维空间位置信息,且具有较强的鲁棒性,适用于各种场景,并保留了一定的数据完整性。

一种基于分割网络优化的图像语义分割方法及系统.pdf
本发明实施例提供一种基于分割网络优化的图像语义分割方法及系统,其中方法包括:确定待语义分割的图像;将所述图像输入至分割网络优化模型中,得到所述分割网络优化模型输出的图像语义分割结果;其中,所述分割网络优化模型是基于样本图像以及对应的像素类别标注进行多阶段损失函数训练后得到的,所述像素类别标注是预先确定的。本发明解决了现有传统的语义分割模型的训练方法不能很好地勾勒出分割部分的边界,对超声图像进行分割时经常出现不圆滑的边界和锯齿状边界的现象问题。

一种基于上下文和浅层空间编解码网络的图像语义分割方法.pdf
当前图像语义分割研究基本围绕如何提取有效的语义上下文信息和还原空间细节信息两个因素来设计更有效算法。现有的语义分割模型,有的忽视了网络浅层的空间细节信息,有的没有获取高质量的语义上下文特征。针对此问题,本发明提出了一种基于上下文和浅层空间编解码网络的图像语义分割方法。在编码端采用二分支策略,其中上下文分支设计了一个新的语义上下文模块来获取高质量的语义上下文信息,而空间分支设计成反U型结构,并结合链式反置残差模块,在保留空间细节信息的同时提升语义信息。解码端,本发明设计优化模块对融合后的上下文信息与空间信息

一种基于自适应采样的图像语义分割方法及系统.pdf
本发明涉及一种基于自适应采样的图像语义分割方法及系统,属于计算机视觉技术领域。首先构建使用自适应采样的语义分割网络,然后使用语义高频损失函数和语义分割任务损失函数对语义分割深度卷积网络进行训练,最后利用训练好的自适应采样的语义分割网络对图像进行语义分割,得到细节丰富、边缘精准的分割结果。本发明利用自适应采样策略提高语义分割网络在下采样过程中保留关键区域细节信息的能力,并在上采样过程中利用多尺度局部信息优化上采样结果,使语义分割网络能够以极低的额外计算成本之下,大幅度提高其对图像关键区域细节的识别能力,得到

基于深度网络的图像语义分割综述.docx
基于深度网络的图像语义分割综述标题:基于深度网络的图像语义分割综述摘要:随着深度学习的快速发展,基于深度网络的图像语义分割成为计算机视觉领域的热门课题之一。图像语义分割旨在将图像中的每个像素分配到其对应的语义类别。本综述旨在对基于深度网络的图像语义分割方法进行全面、系统地总结与综述。对比了常见的图像语义分割数据集,介绍了深度网络在图像语义分割中的应用,分析了传统的图像分割方法与基于深度网络的图像语义分割方法的不同之处,并详细介绍了常见的基于深度网络的图像语义分割算法,包括FCN、U-net、SegNet和