
一种火箭返回制导方法、装置、设备和介质.pdf

Ch****49


1/10

2/10

3/10
4/10
5/10

6/10
7/10
8/10

9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种火箭返回制导方法、装置、设备和介质.pdf
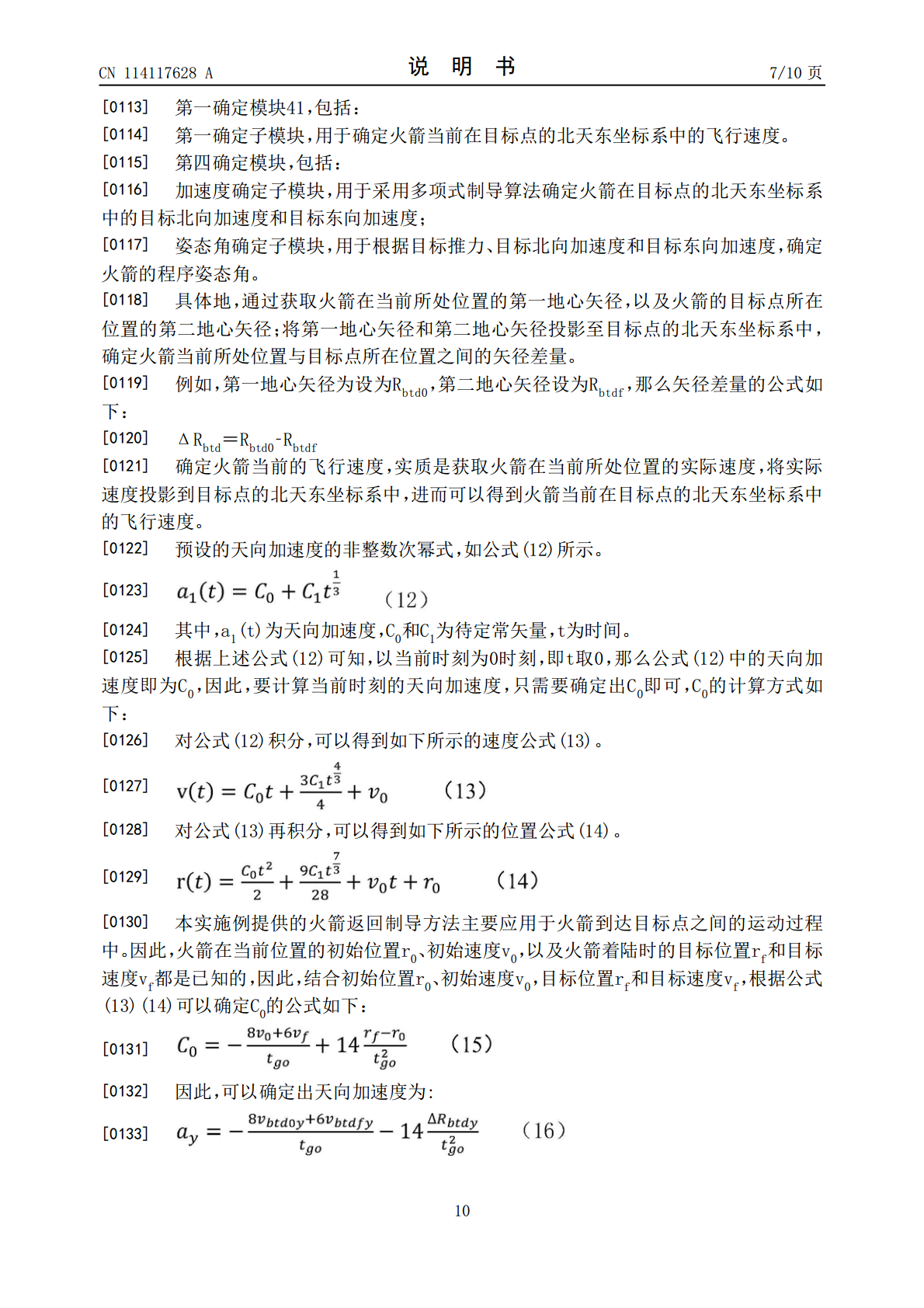
本发明公开了一种火箭返回制导方法、装置、设备和介质,确定火箭当前所处位置与目标点所在位置之间的矢径差量,以及火箭当前的飞行速度;根据矢径差量、火箭当前的飞行速度和时间的非整数次幂,确定火箭的目标天向加速度;根据目标天向加速度和火箭的预测质量,确定火箭发动机的目标推力;采用多项式制导算法求解目标北向加速度和目标东向加速度,结合目标推力确定火箭的程序姿态角,以供火箭的姿态控制系统根据程序姿态角对火箭进行返回制导。本申请通过非整数次幂式确定天向加速度,与传统的二次多项式确定加速度的方式相比,本申请能够将推力比约
一种火箭舱段连接方法、装置、设备和介质.pdf
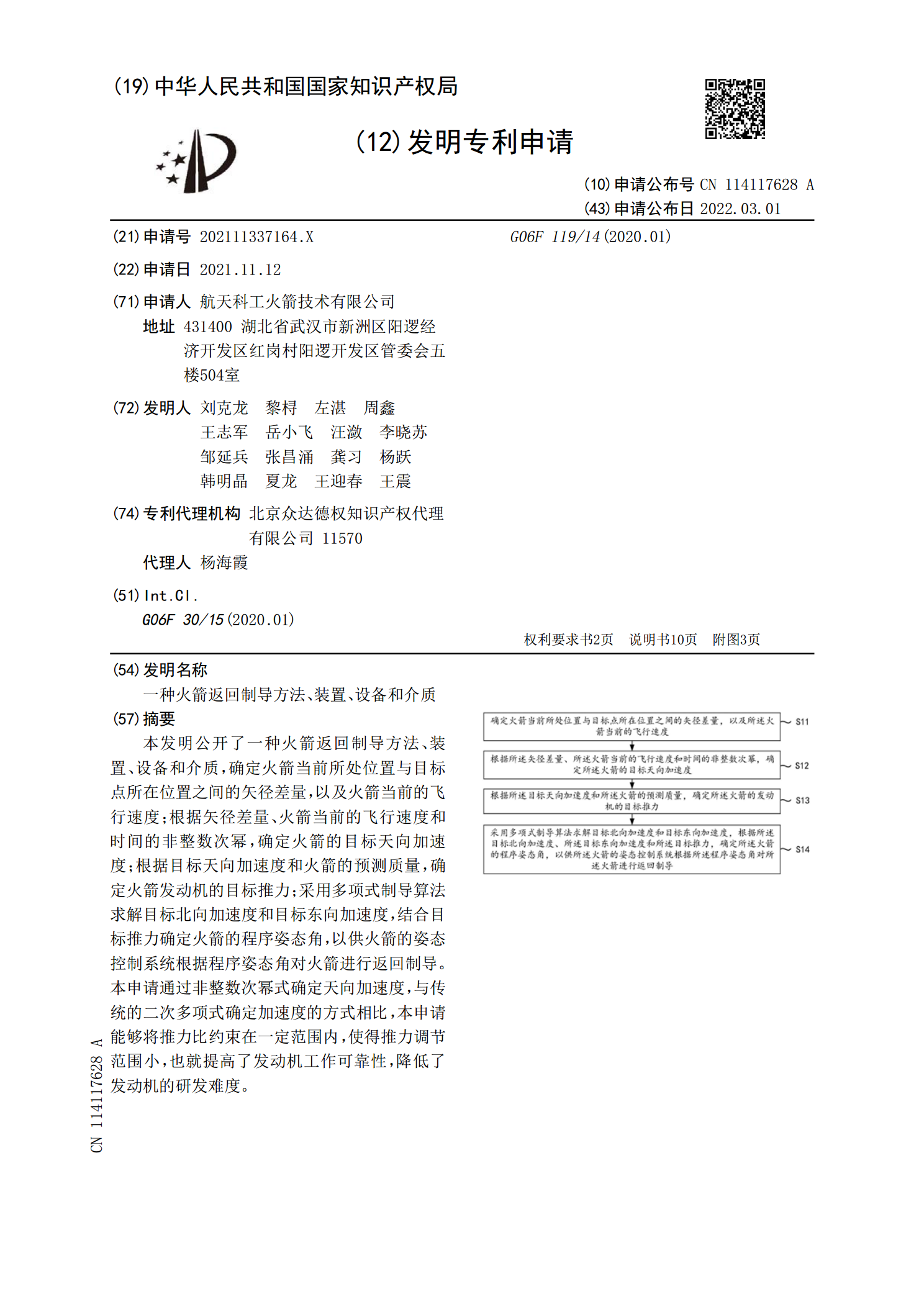
本发明公开了一种火箭舱段连接方法、装置、设备和介质,包括:根据目标箭体,构建与目标箭体对应的箭体一维模型;根据预设的模态振型和模态频率,确定箭体一维模型中的目标舱段;对目标舱段、目标舱段的关键连接部位和关键连接部位的连接件进行三维仿真,得到与目标舱段对应的舱段三维模型;根据箭体一维模型和舱段三维模型,得到箭体混合模型;根据获取的目标弯曲模态振型特征,确定箭体混合模型中的目标舱段的结合面,结合面为目标舱段与相邻舱段之间的刚性连接面。本申请从影响箭体模态的目标舱段着手,建立其三维模型,较准确模拟出弯曲模态振型
基于优化步长的运载火箭迭代制导方法及装置、存储介质.pdf
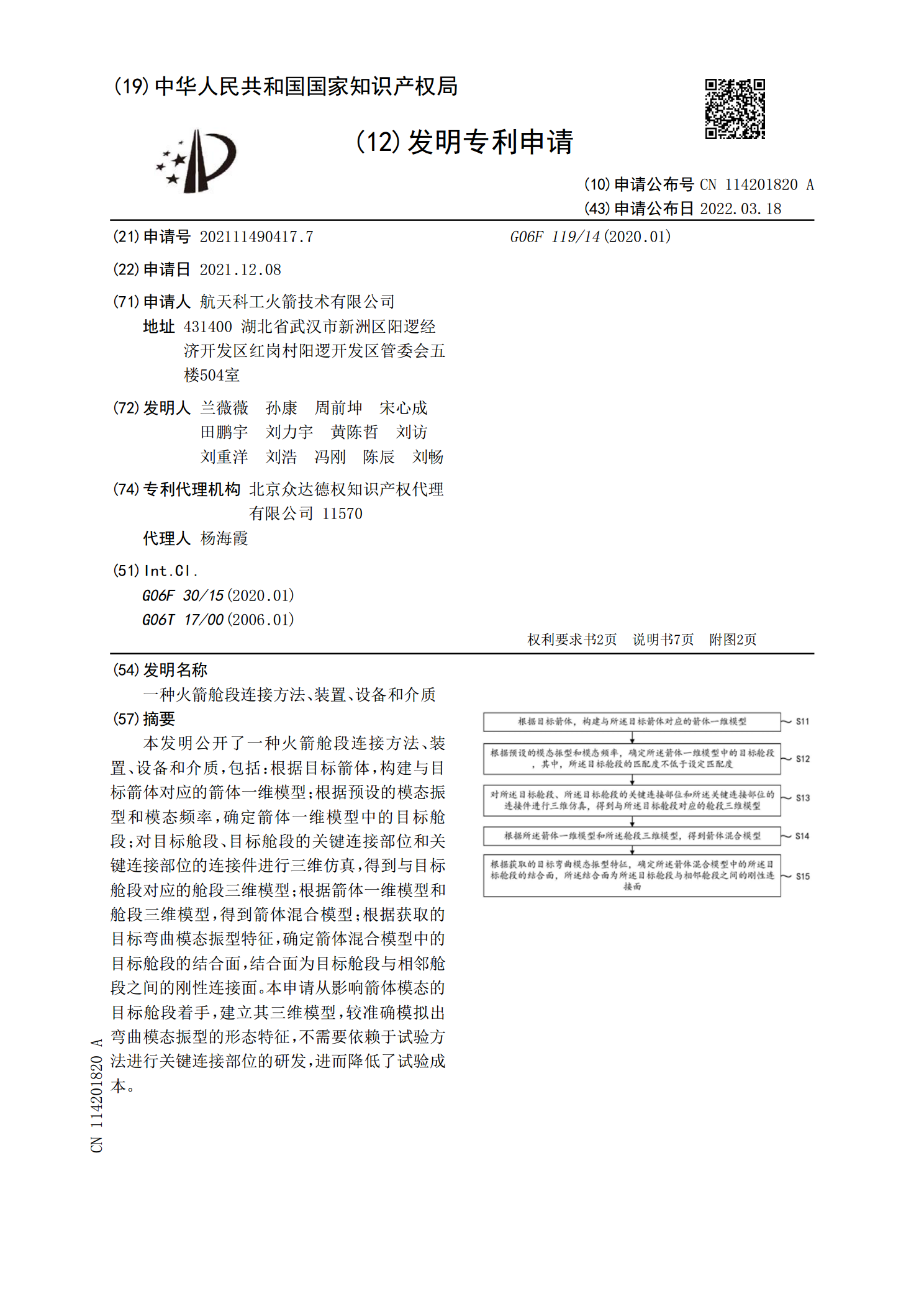
本发明适用于运载火箭技术领域,提供了一种基于优化步长的运载火箭迭代制导方法及装置、存储介质、计算机设备,该方法包括:监测运载火箭的导航信息和加速度信息;基于实时导航信息、实时加速度信息以及标准程序角信息,利用所述基于优化步长的运载火箭迭代制导算法进行多次迭代计算,确定所述运载火箭的程序角修正量,其中,任意一次迭代计算的迭代步长小于前一次迭代计算的迭代步长;按照所述程序角修正量,对所述运载火箭进行程序角修正。本发明能够提高迭代制导计算精度,最终达到优化迭代制导的目的。

首页返回方法、装置、电子设备及存储介质.pdf
本发明公开了一种首页返回方法,应用于计算机技术领域,包括:当接收到返回至首页的指令时,获取当前页面返回至首页的返回链,该返回链包括一个通过第一转场方式转场的第一返回链,和/或,一个通过第二转场方式转场的第二返回链,判断返回链中是否存在第一返回链,根据判断结果,释放返回链,返回至首页。本发明还公开了一种首页返回装置、电子设备及存储介质,在释放返回链的,即关闭所有页面同时使当前页面直接返回至首页,操作简便,提升用户体验。

基于注解自定义返回响应方法、装置、设备和存储介质.pdf
本申请涉及一种基于注解自定义返回响应方法、装置、设备和存储介质,其中,该方法包括:通过预设的拦截器拦截接口上的接口响应值,并通过反射机制获取接口响应值相应的接口注解;通过校验方法,判断接口注解中是否存在目标注解;如果存在目标注解,则根据目标注解中的特定字段,从接口响应值中获取目标响应值,并返回目标响应值;如果不存在目标注解,则返回接口响应值。通过本申请,解决了现有技术中存在响应类无法共用,难以进行管理的问题,实现了能在接口层中共用响应类,从而便于进行管理的效果。