
信息获取方法、装置、电子设备及存储介质.pdf

一吃****瀚文

1/10
2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

信息获取方法、装置、电子设备及存储介质.pdf
本申请公开了一种信息获取方法、装置、电子设备及存储介质,涉及传感器技术领域,电子设备安装在升降机的桥箱上,桥箱带动电子设备沿着升降机的立柱移动,立柱由多个标准节沿着目标方向堆叠组成,电子设备在沿着目标方向移动的过程中,移动到立柱的目标标准节时,接收目标标准节上的目标传感器采集的信息,电子设备移动到目标标准节,电子设备与通信的目标传感器之间的距离较近,保证了与目标传感器之间的通信质量,使得信息可以及时、可靠的采集。

信息获取方法、装置、电子设备及存储介质.pdf
本申请公开了一种信息获取方法,其特征在于,适用于终端设备,包括:在开机过程中,按照预设天线确定规则,从多个毫米波MMW天线中确定出目标天线;读取所述目标天线对应的状态指示标识;根据所述状态指示标识与预设标识列表确定所述目标天线与通信模块之间的连接状态,所述连接状态包括未连接、已连接或状态缺失,所述通信模块用于收发数据,可提高获取MMW天线与通信模块之间的连接状态的效率。
信息获取方法、装置、电子设备及存储介质.pdf
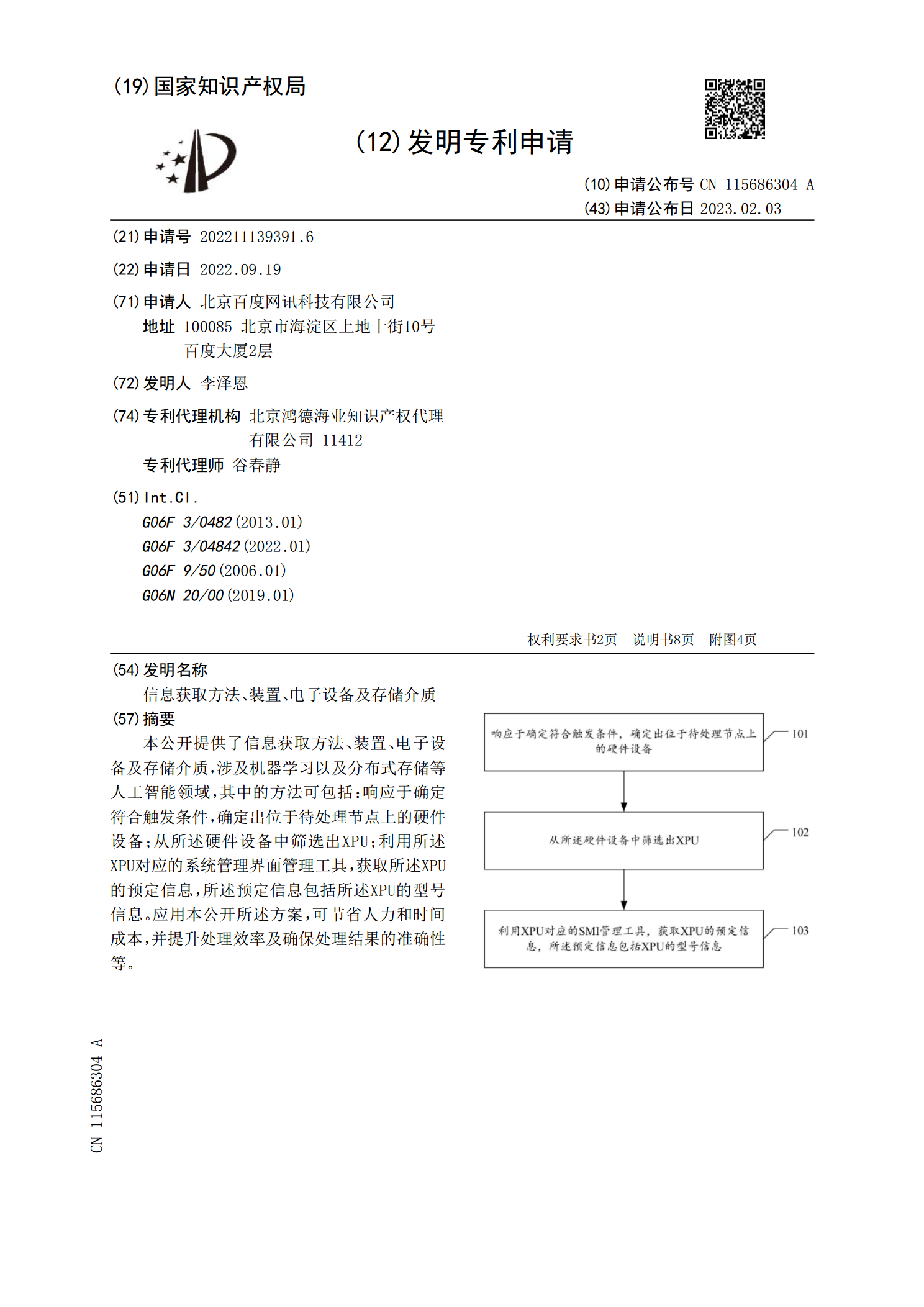
本公开提供了信息获取方法、装置、电子设备及存储介质,涉及机器学习以及分布式存储等人工智能领域,其中的方法可包括:响应于确定符合触发条件,确定出位于待处理节点上的硬件设备;从所述硬件设备中筛选出XPU;利用所述XPU对应的系统管理界面管理工具,获取所述XPU的预定信息,所述预定信息包括所述XPU的型号信息。应用本公开所述方案,可节省人力和时间成本,并提升处理效率及确保处理结果的准确性等。

信息获取方法、装置、电子设备及存储介质.pdf
本公开提供了一种信息获取方法、装置、电子设备及存储介质,涉及计算机技术领域,具体涉及深度学习、自然语言处理等人工智能技术领域。具体实现方案为:获取待处理文件和信息类型,并从待处理文件中识别出与信息类型相关的至少一个候选信息,再确定候选信息的目标识别特征和候选信息的语义特征,其中,目标识别特征用于描述候选信息与信息类型的匹配情况,以及根据目标识别特征和语义特征,从至少一个候选信息之中确定出目标信息,由此,能够有效地提升信息获取方法的适用性。

信息获取方法、装置、电子设备及存储介质.pdf
本申请实施例提供了信息获取方法、装置、电子设备及存储介质方法,该方法包括:确定多个标题中的每一个标题的融合得分和多个封面图像中的每一个封面图像的融合得分;基于每一个标题的融合得分,从多个标题中确定出候选标题集合,基于每一个封面图像的融合得分,从多个封面图像中确定出候选封面图像集合;对于候选标题集合中的每一个候选标题,基于多种与该候选标题相关的行为的频率,确定该候选标题的得分,对于候选封面图像集合中的每一个候选封面图像,基于多种与该候选封面图像相关的行为的频率,确定该候选封面图像的得分;基于每一个候选标题的