
一种目标跟踪方法、系统、设备、介质及数据处理终端.pdf

Ja****23


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共25页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种目标跟踪方法、系统、设备、介质及数据处理终端.pdf
本发明属于信号处理中状态估计与目标跟踪技术领域,公开了一种目标跟踪方法、系统、设备、介质及数据处理终端,所述目标跟踪方法包括:建立离散系统方程,对参数初始化;根据前状态预测下一时刻的状态,并根据预测状态对量测进行预测估计;输入传感器测量的量测数据,求得量测新息;通过平滑变结构滤波器对量测进行滤波,求得量测的增益项;根据协方差求得状态与量测增益项对应的系数;根据状态与量测增益项对应的系数和量测增益项估计出状态。本发明基于平滑变结构滤波器提出新的估计没有量测值对应的状态的方法,针对线性与非线性系统给出不同的解

一种无人机目标跟踪方法、系统、介质、设备及终端.pdf
本发明属于计算机视觉中的目标跟踪技术领域,公开了一种无人机目标跟踪方法、系统、介质、设备及终端,利用ImageNet数据集进行主干网络预训练;创建SiamTCP无人机跟踪模型,并在多个视频数据集上训练SiamTCP无人机跟踪模型。本发明提供的基于目标感知级联像素匹配的无人机目标跟踪方法,通过在多个数据集上进行训练,从而确定神经网络模型的参数,训练完成之后的模型,可以应用于无人机场景的目标跟踪任务。具体而言,本发明提出了逐像素互相关,并进行级联操作,通过部分到部分的匹配操作代替全局到全局的匹配,增强了特征融

一种目标跟踪方法、系统及存储介质和终端设备.pdf
本发明实施例公开了一种目标跟踪方法、系统及存储介质和终端设备,应用于基于人工智能的信息处理技术领域。目标跟踪系统会基于图像静态的外观特征对目标对象进行定位,即根据目标图片块和待处理帧图像的第一特征信息和第二特征信息,确定目标对象的第一候选位置信息;然后结合基于图像的运动特征对目标对象的定位,即根据参考帧图像和待处理帧图像的第一光流信息和第二光流信息及目标图片块的参考位置信息,确定目标对象的第二候选位置信息,进而根据第一候选位置信息和第二候选位置信息可以实现对目标对象的最终定位。这样通过图像的运动特征可以尽
目标跟踪方法、系统、终端及存储介质.pdf
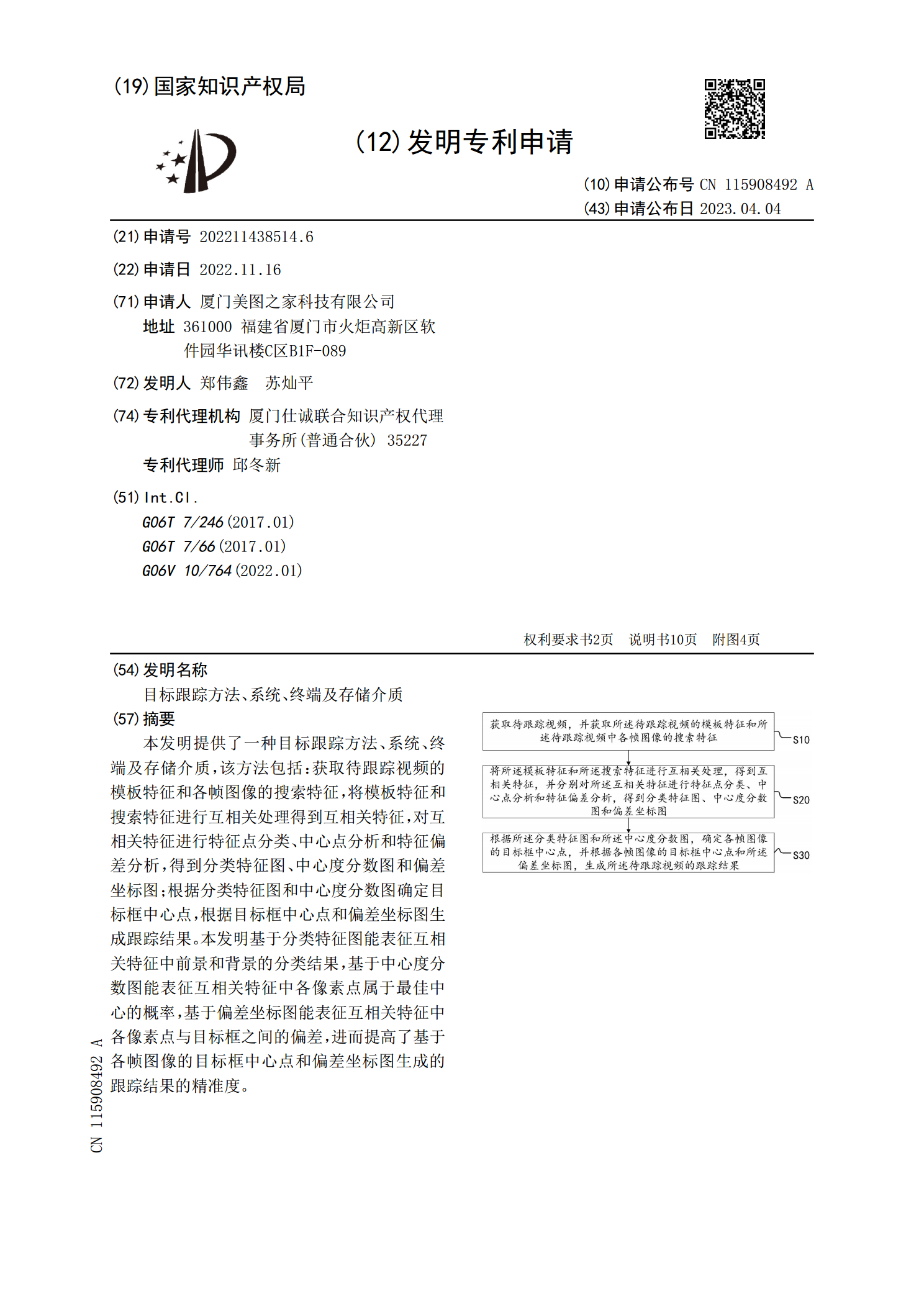
本发明提供了一种目标跟踪方法、系统、终端及存储介质,该方法包括:获取待跟踪视频的模板特征和各帧图像的搜索特征,将模板特征和搜索特征进行互相关处理得到互相关特征,对互相关特征进行特征点分类、中心点分析和特征偏差分析,得到分类特征图、中心度分数图和偏差坐标图;根据分类特征图和中心度分数图确定目标框中心点,根据目标框中心点和偏差坐标图生成跟踪结果。本发明基于分类特征图能表征互相关特征中前景和背景的分类结果,基于中心度分数图能表征互相关特征中各像素点属于最佳中心的概率,基于偏差坐标图能表征互相关特征中各像素点与目

目标跟踪自校正方法、系统、介质、设备、终端及应用.pdf
本发明属于目标跟踪技术领域,公开了一种目标跟踪自校正方法、系统、介质、设备、终端及应用,选择孪生网络跟踪算法SiamFC++作为基本跟踪算法,通过分类分支与回归分支计算搜索帧与模板帧的相似度,得到模板帧与搜索帧的深度特征相似度图;取出相似度最高的10个目标位置,计算两两之间的欧氏距离,画出距离分布直方图,根据直方图的分布规律判断跟踪是否失效;当判断出发生跟踪失效后,计算前帧目标与当前帧中候选目标间的相似度,取相似度最高的目标为校正后目标;计算跟踪结果与目标真实位置之间的误差,计算准确率,对跟踪结果进行评价