
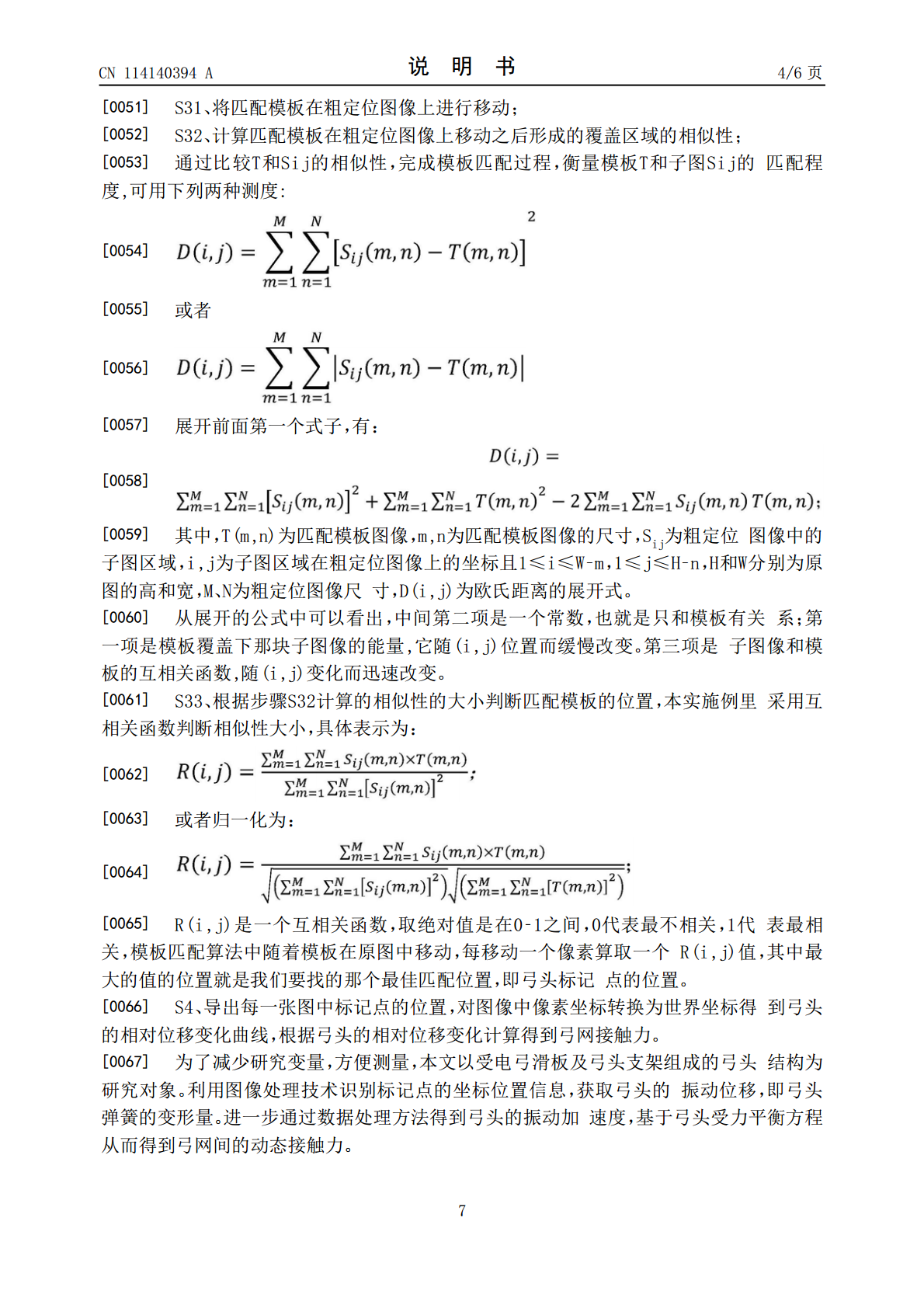
一种非接触式的基于图像处理技术的弓网接触力检测方法.pdf

是翠****ng


1/10
2/10

3/10

4/10

5/10

6/10
7/10

8/10

9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种非接触式的基于图像处理技术的弓网接触力检测方法.pdf
本发明公开了一种非接触式的基于图像处理技术的弓网接触力检测方法,与传统的检测方法相比,该方法设备安装简单、具有实时性和非接触性的特点,可以避免检测时对受电弓弓头进行改造、保证其原始的动态性能;同时更加自动化、智能化,检测灵活度高,准确性高;并且行车干扰小,适用于长距离、长时间和环境条件恶劣下的连续跟踪检测。通过多组地面动态实验,验证了此方法的有效性和准确性,在经过惯性力和阻尼力的修正之后检测精度远远满足弓网接触力的检测精度,进一步丰富了目前在非接触式测量领域弓网接触力检测方法的研究,同时可以为弓网受流质量

一种检测弓网接触力的方法.pdf
一种检测弓网接触力的方法,包括:对检测相机进行调试;对图像进行采集,利用调试后的相机分别获取受电弓第一帧图像和受电弓变形后图像,受电弓的第一帧图像作为样本图像提取标记点的匹配模板;对图像进行灰度化处理,对三维图像矩阵进行灰度化处理,消除彩色信息,保留亮度信息得到相应的二维图像矩阵;对二维灰度化图像采用中值滤波法进行降噪处理;对图像进行分割,提取标记点模板;利用基于KNN和PROSC匹配算法检测弓头标记点的像素坐标,根据相机标定得到实际的标记点的相对位移;根据接触力与受电弓位移的特性关系得出弓网接触力的大小

一种基于双立体靶标的非接触式弓网接触力测量系统.pdf
本发明涉及轨道交通弓网关系检测领域,特别是一种基于双立体靶标的非接触式弓网接触力测量系统,其包括:第一立体靶标,设置于第一碳滑板侧面靠近第一支撑点位置;第二立体靶标,设置于上臂杆顶管侧面且与在水平方向对应所述第一立体靶标所在位置;线阵图像采集设备,竖向设置于列车顶棚,用于拍摄包含所述第一立体靶标和所述第二立体靶标的目标图像;以及根据所述目标图像实现计算弓网接触力的计算终端;所述计算终端包括:光条像素提取模块,第一弹性力计算模块、第二弹性力计算模块和弓网接触力输出模块。本发明相比传统的接触式压力和计算和多套

弓网接触力非区段异常识别方法及装置.pdf
本发明提供了一种弓网接触力非区段异常识别方法及装置,该方法包括:从待分析的弓网接触力检测数据中,筛选出离群值点,确定所述离群值点为单值异常数据;将待分析的弓网接触力检测数据采用移动滑窗的方式处理为时间序列预测集;对时间序列预测集中每个检测数据,将时间序列预测集中该检测数据前预设长度个检测数据输入至训练好的接触力拉直线识别模型中,获得预测值,在所述预测值与该检测数据的差值超过误差阈值后,确定该检测数据为拉直线异常数据,其中该检测数据在时间序列预测集中的序号在预设标记值之后。本发明可以自动识别弓网接触力非区段

基于图像处理的弓网燃弧检测方法.docx
基于图像处理的弓网燃弧检测方法基于图像处理的弓网燃弧检测方法摘要:随着能源需求的不断增加,电力系统的安全运行至关重要。而弓网燃弧是电力系统中潜在的危险因素之一。传统的弓网燃弧检测方法通常需要人工干预,效率低下且易出现漏报等问题。为了解决这些问题,本文提出了一种基于图像处理的弓网燃弧检测方法。通过图像采集、预处理、特征提取和分类器设计等步骤,能够实现对弓网燃弧的自动检测和识别。实验结果表明,该方法具有较高的检测准确率和效率,能够有效地提高电力系统的安全性。关键词:弓网燃弧,图像处理,特征提取,分类器1.引言