
一种导弹非奇异固定时间滑模制导律的设计方法.pdf

睿达****的的

1/10
2/10
3/10
4/10

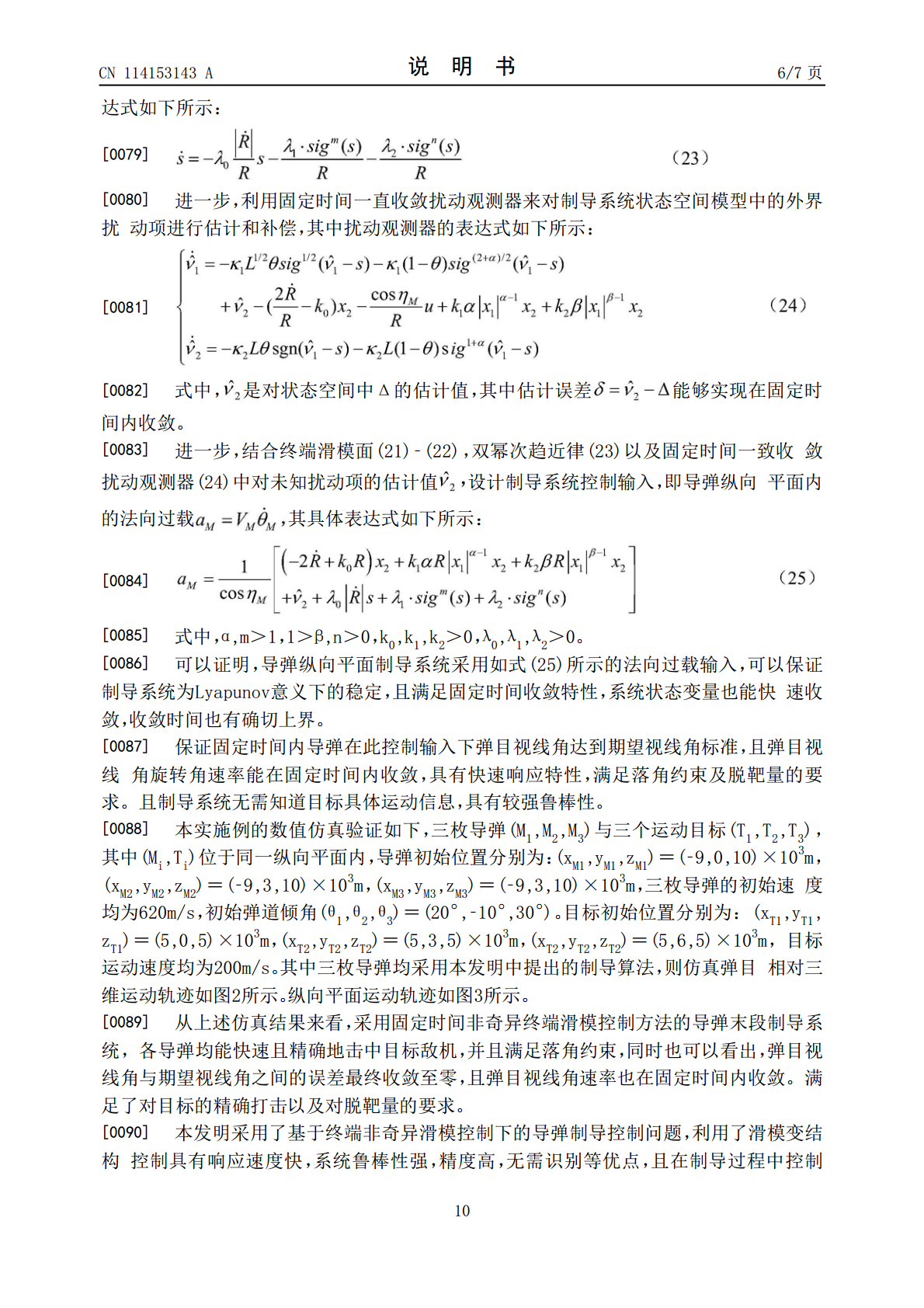
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种导弹非奇异固定时间滑模制导律的设计方法.pdf
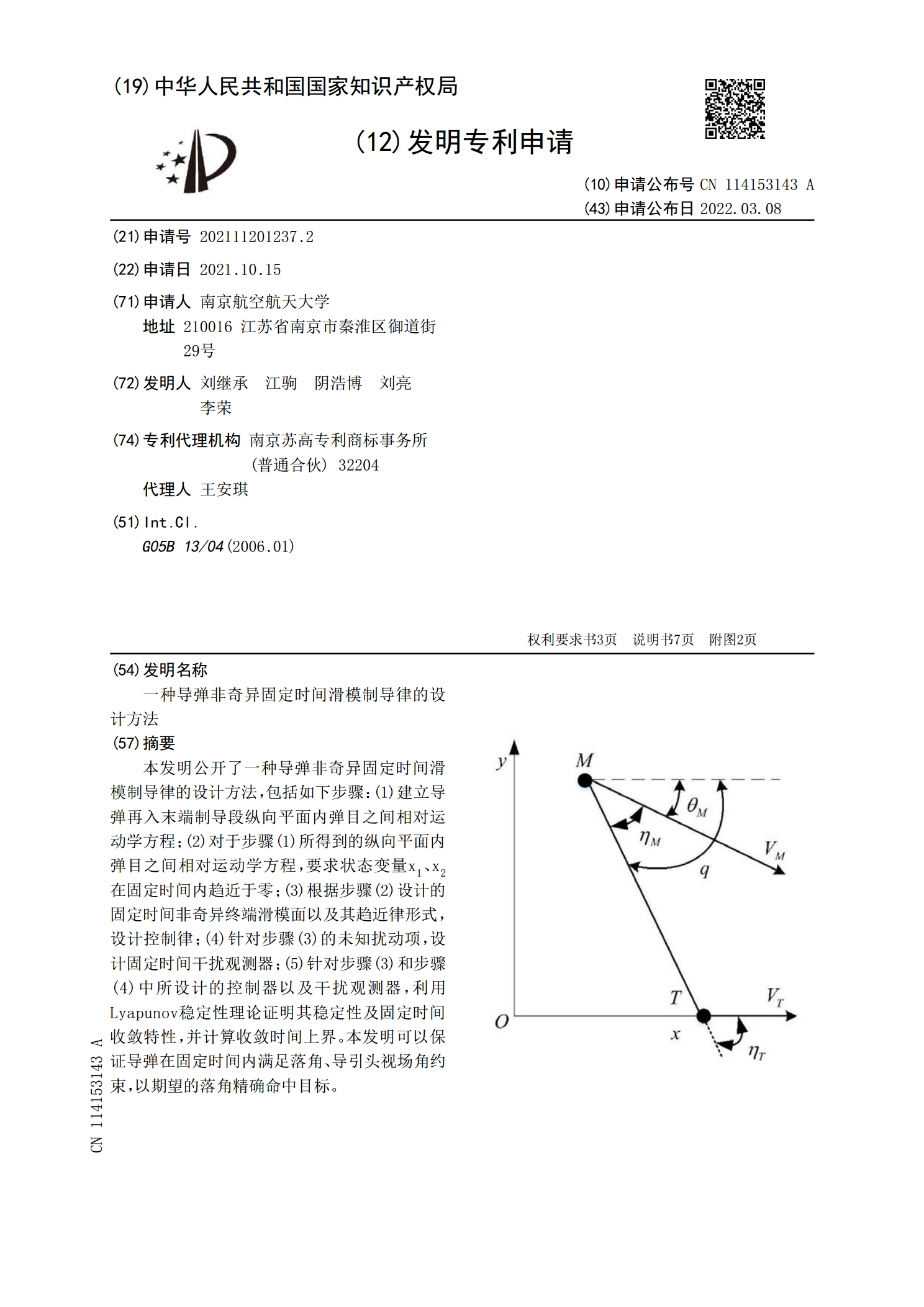
本发明公开了一种导弹非奇异固定时间滑模制导律的设计方法,包括如下步骤:(1)建立导弹再入末端制导段纵向平面内弹目之间相对运动学方程;(2)对于步骤(1)所得到的纵向平面内弹目之间相对运动学方程,要求状态变量x

基于滑模变结构的导弹制导律设计.docx
基于滑模变结构的导弹制导律设计基于滑模变结构的导弹制导律设计摘要:导弹制导技术是导弹系统中至关重要的一环,能够保证导弹有效命中目标。本文提出了一种基于滑模变结构的导弹制导律设计方法。通过引入滑模理论和变结构控制,可以实现导弹的高精度制导,并提高其抗干扰性能。通过数学建模、控制器设计和仿真验证,本文证明了该方法的有效性。关键词:导弹制导;滑模变结构;高精度;抗干扰1.引言导弹制导是导弹系统中的核心技术之一,对于提高导弹的命中精度和抗干扰性能具有重要意义。传统的导弹制导常常依赖于PID控制器等线性控制方法,但

基于非光滑控制方法的导弹制导律研究.docx
基于非光滑控制方法的导弹制导律研究基于非光滑控制方法的导弹制导律研究摘要:随着导弹技术的不断发展,制导技术的研究变得越来越重要。在传统的导弹制导律中,光滑控制方法被广泛应用,但在面对一些非线性、不确定性和时变性的问题时效果有限。为了克服这些问题,研究人员开始探索非光滑控制方法在导弹制导中的应用。本论文研究基于非光滑控制方法的导弹制导律,从理论和实践两个方面进行综述和分析。关键词:导弹制导、非光滑控制、制导律、导弹技术1.引言导弹制导是导弹技术中的核心问题之一,对于提高导弹的命中精度和生存能力具有重要意义。

基于二阶滑模控制的多导弹协同制导律研究.docx
基于二阶滑模控制的多导弹协同制导律研究摘要:本文尝试研究基于二阶滑模控制的多导弹协同制导律,通过探讨二阶滑模控制的优点,建立多导弹协同制导模型,提出基于二阶滑模控制的多导弹协同制导律。通过仿真实验验证了该方法的可行性和有效性,可为实际应用提供参考。关键词:二阶滑模控制、多导弹协同制导、仿真实验、可行性一、引言导弹系统技术作为现代军事技术的重要组成部分,具有重要的战略地位。在导弹的制导过程中,多导弹协同制导技术能够提高导弹的命中率,保证作战目标的成功袭击。因此,在导弹制导技术领域,多导弹协同制导技术越来越受
一种导弹抗网络攻击制导律设计方法.pdf
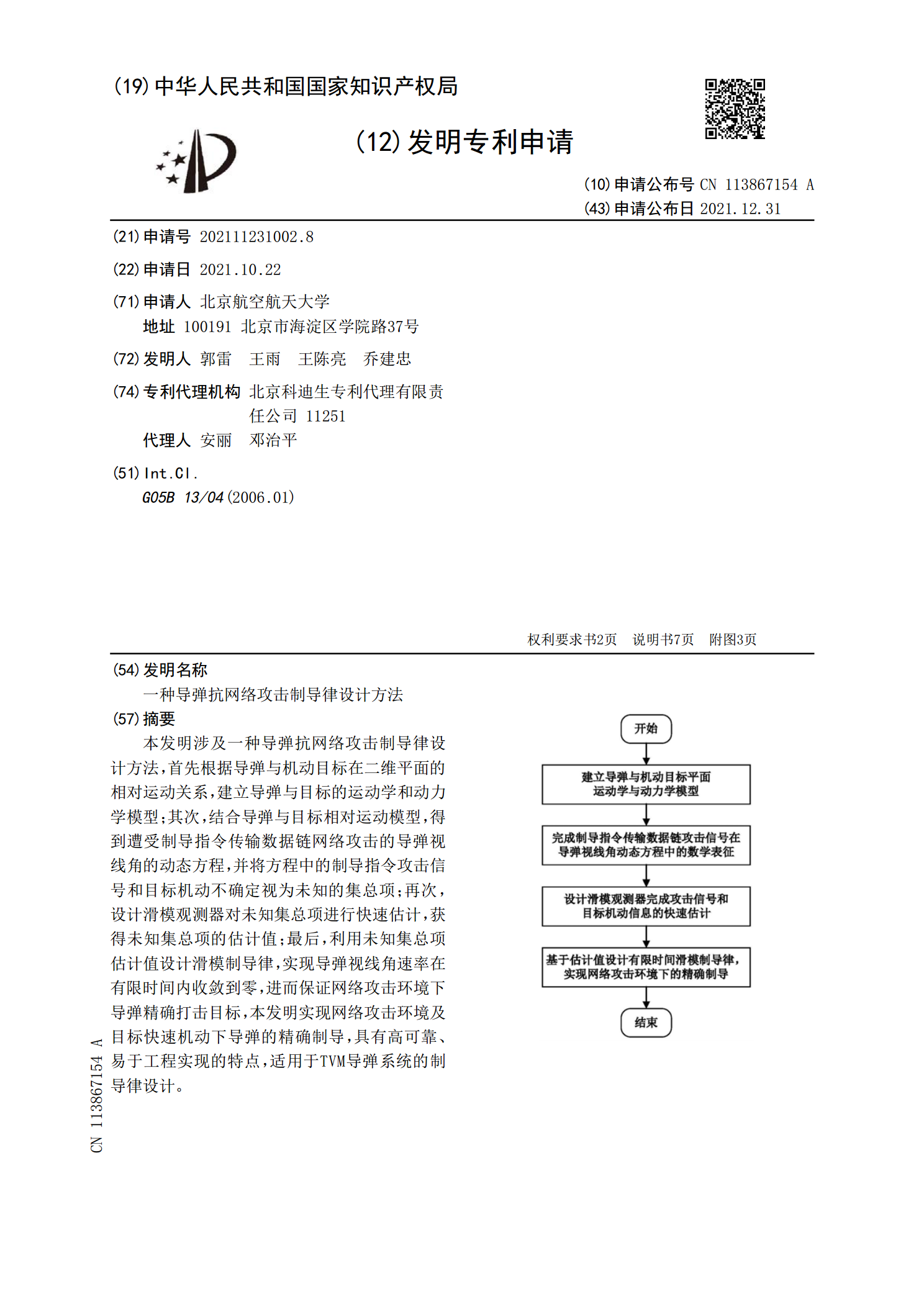
本发明涉及一种导弹抗网络攻击制导律设计方法,首先根据导弹与机动目标在二维平面的相对运动关系,建立导弹与目标的运动学和动力学模型;其次,结合导弹与目标相对运动模型,得到遭受制导指令传输数据链网络攻击的导弹视线角的动态方程,并将方程中的制导指令攻击信号和目标机动不确定视为未知的集总项;再次,设计滑模观测器对未知集总项进行快速估计,获得未知集总项的估计值;最后,利用未知集总项估计值设计滑模制导律,实现导弹视线角速率在有限时间内收敛到零,进而保证网络攻击环境下导弹精确打击目标,本发明实现网络攻击环境及目标快速机动