
一种螺纹连接旋转松动角度的测量方法、装置及系统.pdf

猫巷****婉慧

1/10
2/10

3/10

4/10
5/10
6/10

7/10

8/10

9/10

10/10
亲,该文档总共25页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种螺纹连接旋转松动角度的测量方法、装置及系统.pdf
本申请公开一种螺纹连接旋转松动角度的测量方法、装置及系统,包括图像采集装置和振动测试装置,通过振动测试装置对待测试螺纹连接结构进行振动测试;通过图像采集装置,采集处于振动测试状态下的待测试螺纹连接结构的视频或图像序列;选定基准图像,获取待配准图像;分别提取基准图像和待配准图像中特征点;确定特征点对;计算待测试螺纹连接结构的旋转中心坐标;根据旋转中心坐标以及特征点对,计算待测试螺纹连接结构在目标时刻相对于基准时刻的旋转松动角度。本申请通过图像采集装置采集处于振动测试状态下的待测试螺纹连接结构的图像,然后利用

一种齿轮旋转角度测量方法及装置.pdf
本申请提供一种齿轮旋转角度测量方法及装置,该装置通过获取与被测齿轮啮合的第一齿轮旋转的第一角度,以及与被测齿轮啮合的第二齿轮旋转的第二角度,利用第一角度和第二角度对预先设置的第一测量公式进行圆整处理,得到第一测量公式的圆整值;进而利用第一测量公式的圆整值和预先设置的第二测量公式计算得到被测齿轮的旋转角度,以实现对被测齿轮的旋转角度的测量。并且,本申请通过圆整处理可有效减小第一角度和/或第二角度的测量误差,提高测量结果的准确性。

螺纹连接结构松动分析方法研究.docx
螺纹连接结构松动分析方法研究螺纹连接结构的松动分析方法研究摘要:螺纹连接结构广泛应用于各种机械设备中,但由于工作环境的变化和使用寿命的增长,螺纹连接结构容易出现松动问题。本文对螺纹连接结构的松动问题进行分析,并探讨了相应的分析方法,包括实验方法和计算方法。通过对螺纹连接结构的松动分析,可以提供有效的解决方案,延长螺纹连接结构的使用寿命。关键词:螺纹连接结构;松动;分析方法1.引言螺纹连接结构是一种常用的连接方式,具有结构简单、安装方便等优点,被广泛应用于各种机械设备中。然而,由于工作环境的变化和使用寿命的

一种螺纹连接装置.pdf
一种螺纹连接装置,包括螺栓(1)和螺母(2),分别带有内外螺纹(23,12),互相啮合连接,外螺纹(12)的后部设有至少一个周向的卡槽(11),卡槽(11)内有一止退弹片(3),其下部(31)置于卡槽(11)内,上部(32)伸出卡槽(11)外;内螺纹(23)的前端带有止退圈(21),止退圈(21)由圆周上重复排列的波浪状止退齿(22)组成;内外螺纹(23,12)啮合时,止退弹片(3)的前端抵在止退齿(22)上。从根本上防止了螺纹部件倒转,具有极佳的防松效果。
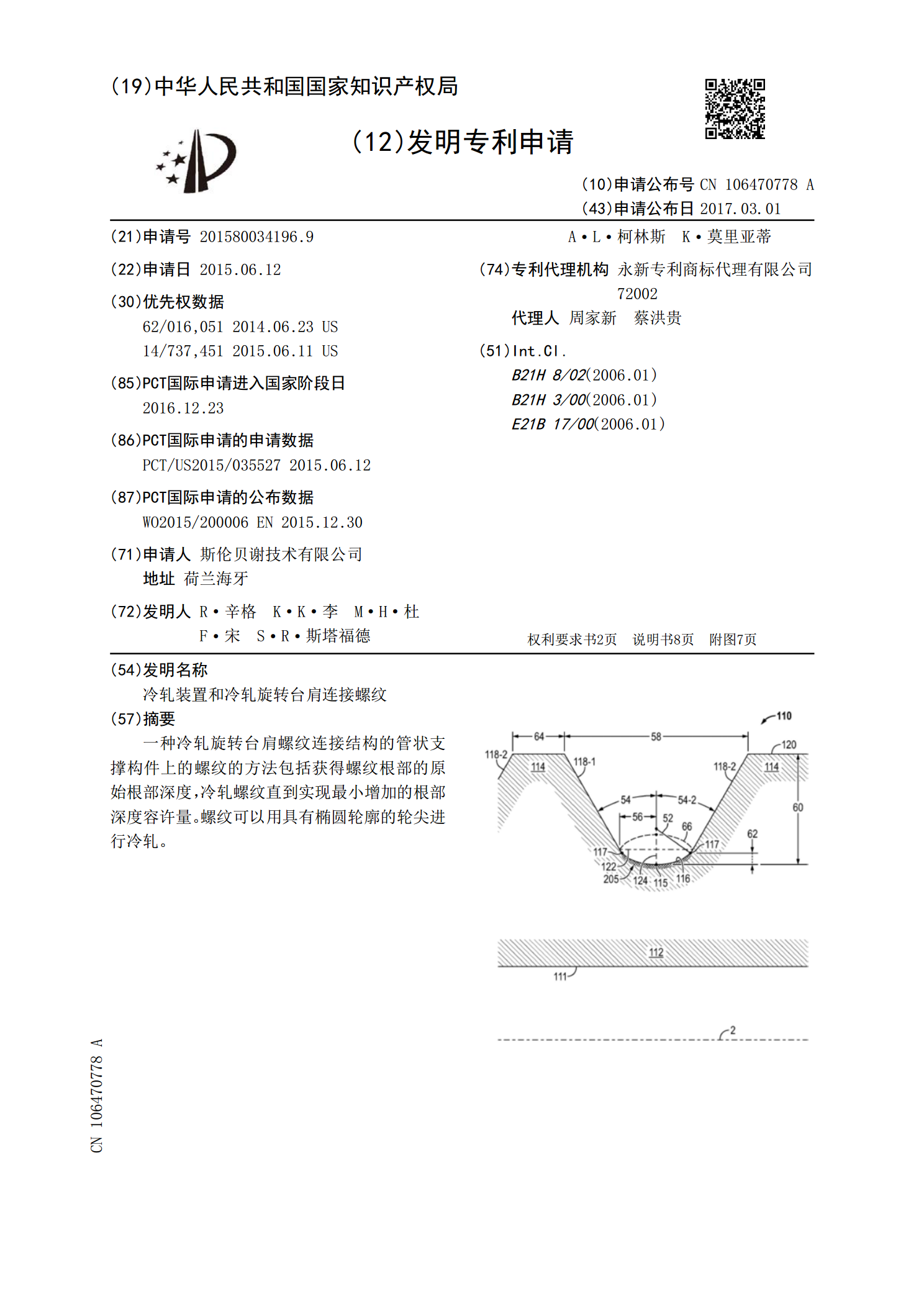
冷轧装置和冷轧旋转台肩连接螺纹.pdf
一种冷轧旋转台肩螺纹连接结构的管状支撑构件上的螺纹的方法包括获得螺纹根部的原始根部深度,冷轧螺纹直到实现最小增加的根部深度容许量。螺纹可以用具有椭圆轮廓的轮尖进行冷轧。