
基于YOLACT的三维激光雷达道路点云分割方法.pdf

fu****级甜


1/9

2/9
3/9
4/9
5/9
6/9

7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
基于YOLACT的三维激光雷达道路点云分割方法.pdf
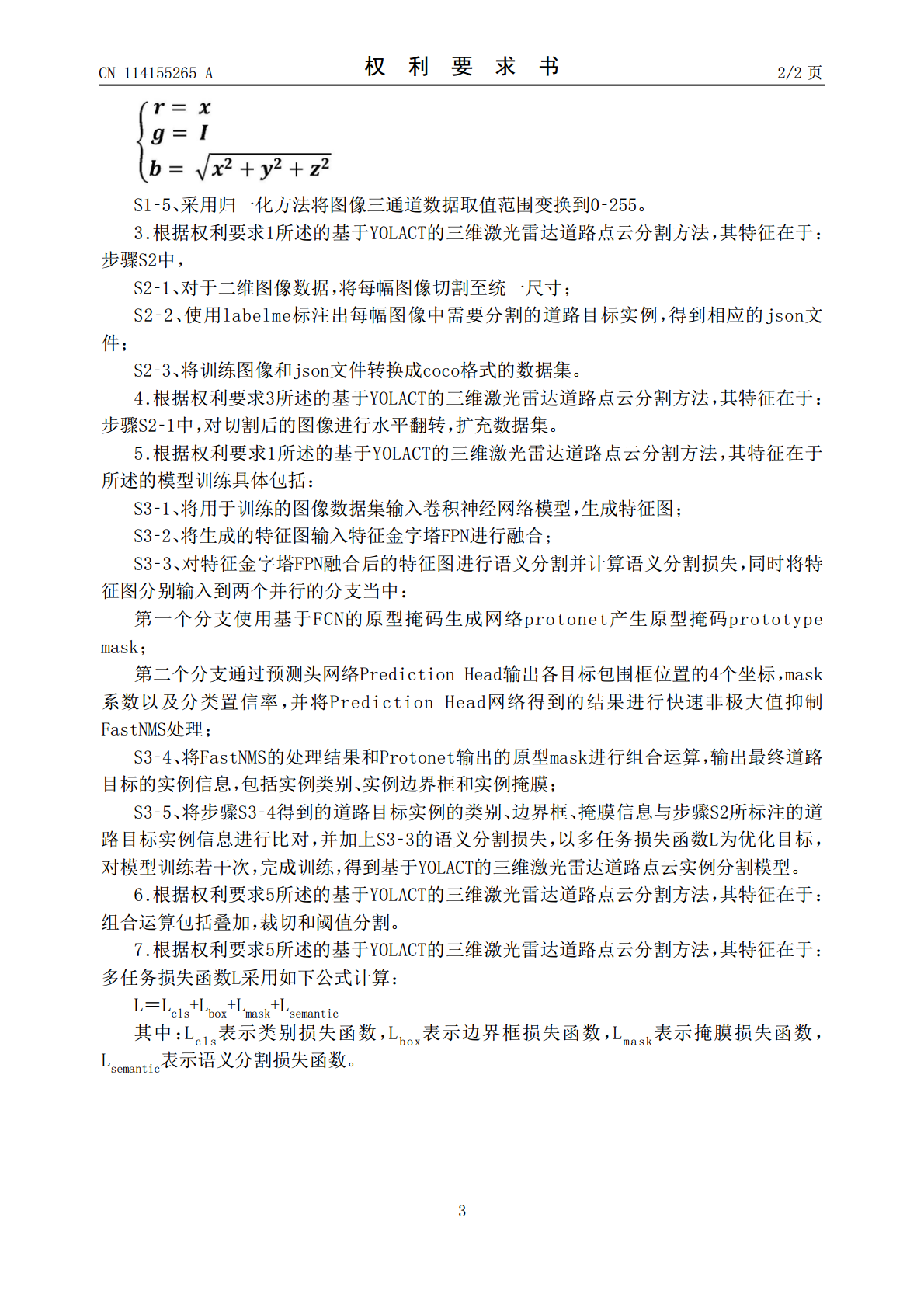
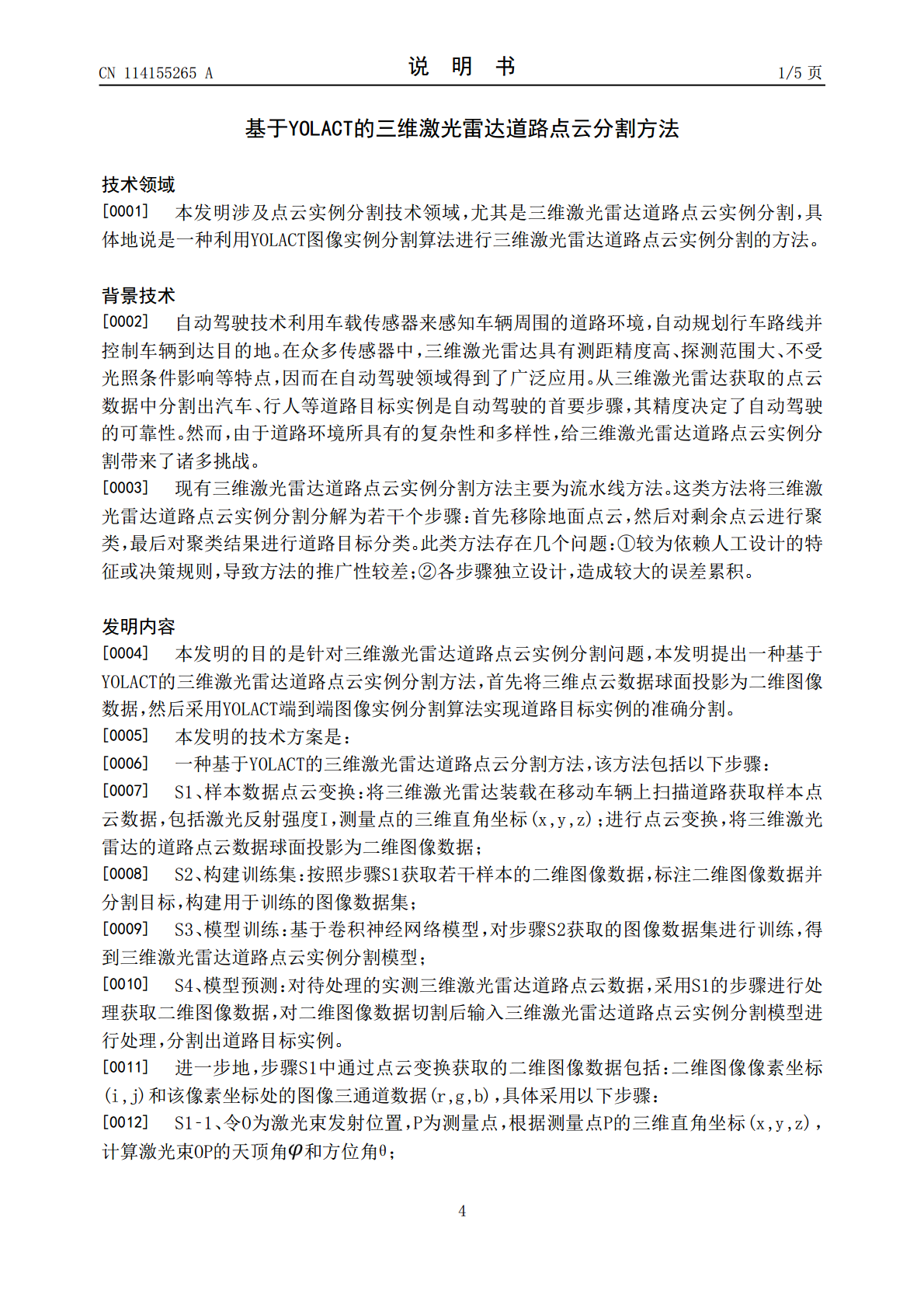
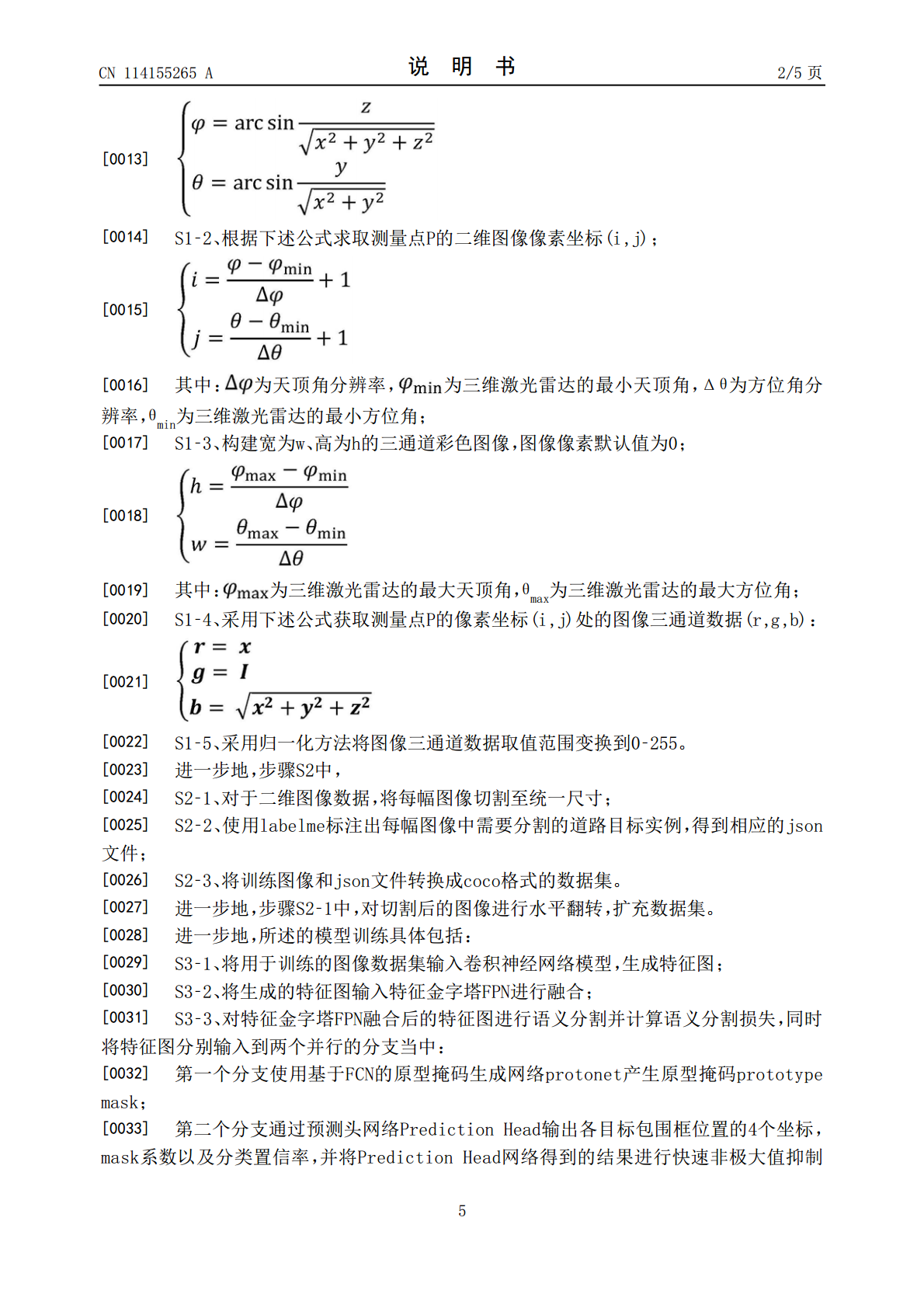
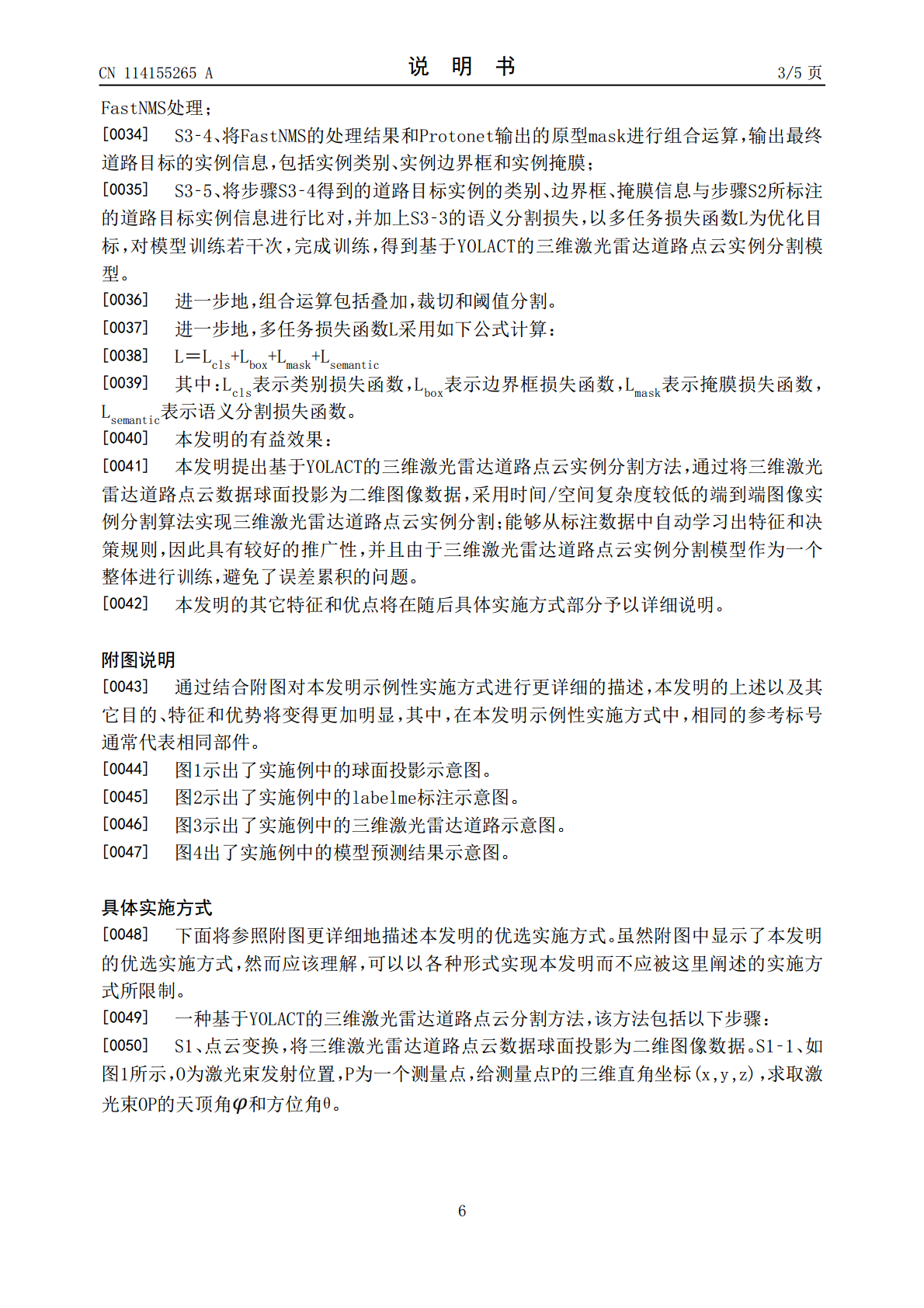
一种基于YOLACT的三维激光雷达道路点云分割方法,该方法包括以下步骤:样本数据点云变换,将三维激光雷达的道路点云数据球面投影为二维图像数据;标注并分割目标,构建用于训练的图像数据集;基于卷积神经网络模型进行训练,得到三维激光雷达道路点云实例分割模型;对待处理的实测三维激光雷达道路点云数据进行处理,分割出道路目标实例。本发明的方法首先将三维点云数据球面投影为二维图像数据,然后采用YOLACT端到端图像实例分割算法实现道路目标实例的准确分割。

基于YOLACT的行道树靶标点云分割方法.pptx
基于YOLACT的行道树靶标点云分割方法目录YOLACT算法介绍YOLACT算法原理YOLACT算法特点YOLACT算法应用场景行道树靶标点云分割方法行道树靶标点云数据采集行道树靶标点云预处理基于YOLACT的行道树靶标点云分割流程分割效果评估实验结果与分析实验数据集介绍实验结果展示结果分析对比分析应用前景与展望行道树靶标点云分割在智慧城市中的应用前景基于YOLACT算法的改进方向与展望结论研究成果总结对未来研究的建议THANKYOU

基于三维激光雷达点云数据的分割算法研究.docx
基于三维激光雷达点云数据的分割算法研究基于三维激光雷达点云数据的分割算法研究摘要近年来,随着激光雷达技术的不断发展和普及,三维激光雷达点云数据的应用越来越广泛。然而,点云数据的处理和分析仍然是一个具有挑战性的问题。本文针对三维激光雷达点云数据的分割问题,提出了一种基于区域生长和深度学习的分割算法。该算法通过将点云数据转化为图像数据和使用卷积神经网络进行分割,能够有效地对点云数据进行分割和识别。实验结果表明,该算法能够在点云数据的分割任务中取得优秀的性能。关键词:激光雷达;点云数据;分割算法;区域生长;深度

基于改进欧式聚类的三维激光雷达点云目标分割方法.pptx
汇报人:目录PARTONEPARTTWO数据清洗和滤波数据降噪和特征提取数据分割和聚类PARTTHREE传统欧式聚类算法原理算法优缺点分析算法改进措施改进后算法流程PARTFOUR实验数据集介绍实验环境与参数设置实验结果展示结果分析PARTFIVE与其他分割方法比较适用场景和限制条件方法改进和优化方向对未来研究的建议和展望THANKYOU

基于局部凸性的三维激光雷达点云分割算法.docx
基于局部凸性的三维激光雷达点云分割算法基于局部凸性的三维激光雷达点云分割算法摘要:在无人驾驶、三维地图构建和环境感知等领域,点云分割是一项重要的任务。本文提出了一种基于局部凸性的三维激光雷达点云分割算法。首先,通过计算每个点的曲率,我们可以得到点的特征信息。然后,我们使用基于特征的聚类方法将点云分为不同的部分。最后,我们使用局部凸性来进一步细分每个部分。实验证明,我们的算法在分割点云方面具有很好的效果。关键词:三维激光雷达;点云分割;局部凸性;特征1.引言随着三维激光雷达技术的快速发展,获取环境的三维信息