
基于冗余控制的多自由度可穿戴外骨骼手功能康复机器人.pdf

努力****爱敏

1/10

2/10
3/10
4/10
5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于冗余控制的多自由度可穿戴外骨骼手功能康复机器人.pdf
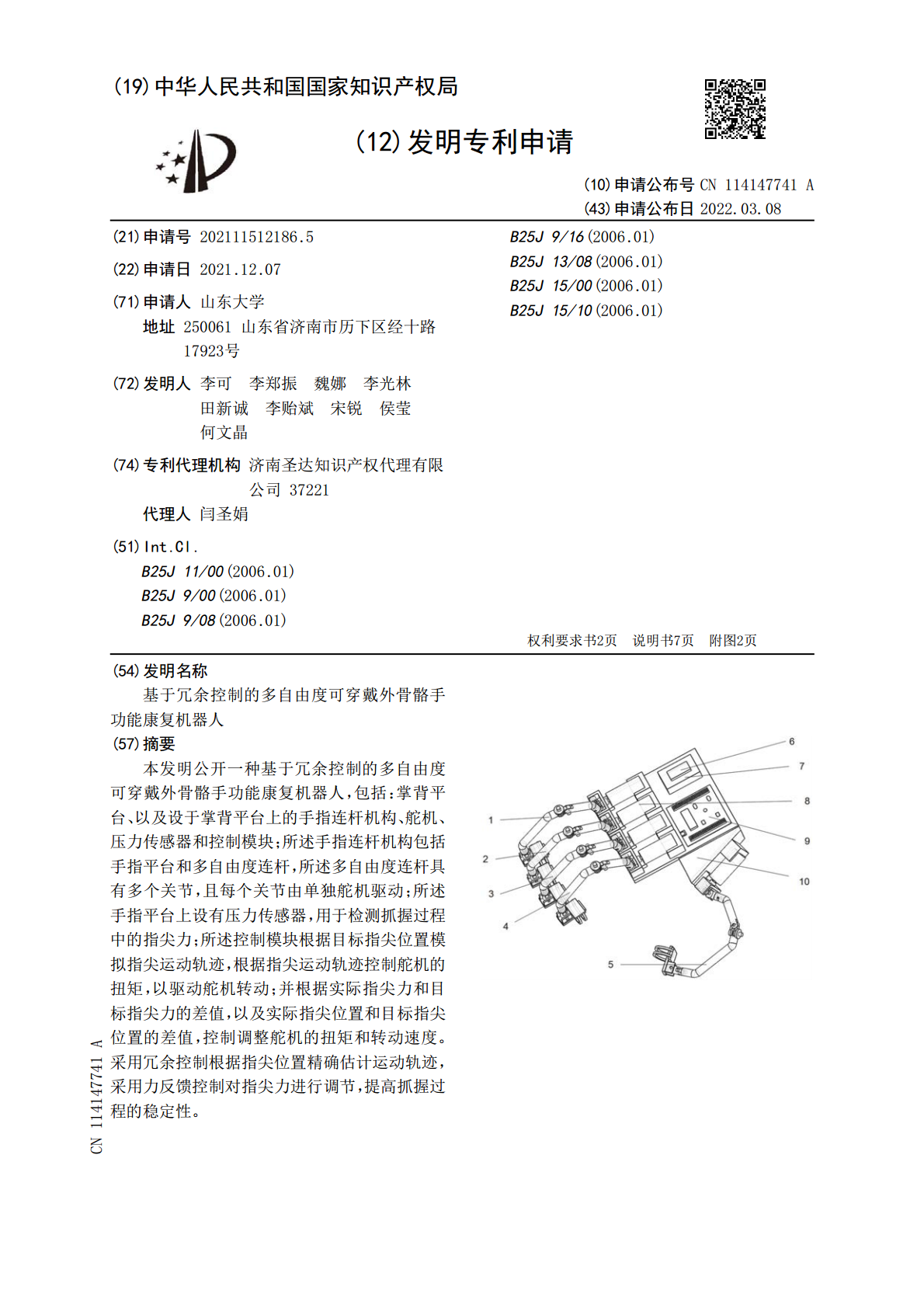
本发明公开一种基于冗余控制的多自由度可穿戴外骨骼手功能康复机器人,包括:掌背平台、以及设于掌背平台上的手指连杆机构、舵机、压力传感器和控制模块;所述手指连杆机构包括手指平台和多自由度连杆,所述多自由度连杆具有多个关节,且每个关节由单独舵机驱动;所述手指平台上设有压力传感器,用于检测抓握过程中的指尖力;所述控制模块根据目标指尖位置模拟指尖运动轨迹,根据指尖运动轨迹控制舵机的扭矩,以驱动舵机转动;并根据实际指尖力和目标指尖力的差值,以及实际指尖位置和目标指尖位置的差值,控制调整舵机的扭矩和转动速度。采用冗余控

基于sEMG的多自由度下肢外骨骼康复机器人结构与控制策略.docx
基于sEMG的多自由度下肢外骨骼康复机器人结构与控制策略目录一、内容描述................................................21.研究背景及意义........................................32.国内外研究现状........................................4二、基于sEMG的下肢外骨骼康复机器人结构......................51.机器人整体结构设计...............

多自由度拇指辅助的软体康复外骨骼机器人.pdf
本发明涉及医用康复训练和助力设备,具体地说是一种多自由度拇指辅助的软体康复外骨骼机器人,包括软体外骨骼手套、肌腱拉力线、柔性连杆、驱动装置及控制系统,肌腱拉力线一端连接直线驱动器,另一端连接软体外骨骼手套用以驱动拇指的外展/内收和弯曲/伸展两个自由度;柔性连杆一端与拇指指套铰接,另一端与手背结构件铰接,并通过肌腱拉力线的收缩沿着滑动槽移动,从而驱动拇指的内收和外展运动;肌腱拉力线连接拇指背侧驱动拇指的伸展运动,另一根拉力线连接拇指掌侧驱动拇指的弯曲运动。本发明可以有效地助力中风患者的拇指运动,以完成所需的

可穿戴下肢康复外骨骼机器人及其步态控制.docx
可穿戴下肢康复外骨骼机器人及其步态控制论文题目:可穿戴下肢康复外骨骼机器人及其步态控制摘要:随着人口老龄化程度不断加剧,下肢康复成为一个重要的医疗挑战。可穿戴下肢康复外骨骼机器人是一种有效的康复辅助工具,通过提供力和灵活性,协助患者恢复步行功能。本文旨在综述可穿戴下肢康复外骨骼机器人及其步态控制的相关研究,讨论其应用领域、技术原理以及存在的挑战和前景。1.引言1.1研究背景1.2目的和意义2.可穿戴下肢康复外骨骼机器人概述2.1结构和工作原理2.2可穿戴技术2.3应用领域和市场前景3.步态控制技术3.1步

基于外骨骼的可穿戴式上肢康复机器人设计与研究.docx
基于外骨骼的可穿戴式上肢康复机器人设计与研究摘要随着人口老龄化和对康复的需求增加,可穿戴式康复机器人成为受关注的领域。本文提出一种基于外骨骼的可穿戴式上肢康复机器人的设计与研究方案。该方案采用了先进的传感器和执行器技术,提供了高度自适应的康复方案。通过机器人协助下的医疗康复训练,被试者在训练中显著改善了上肢运动功能和力量。本文通过实验评估机器人的性能以及其在康复训练中的应用效果。关键词:可穿戴式康复机器人、外骨骼、上肢康复、传感器、执行器引言近年来,人口老龄化问题越来越受到全球各国政府的关注。随着年龄的增