
基于迁移卷积神经网络的滚动轴承跨工况故障检测方法.pdf

猫巷****松臣

1/10

2/10

3/10
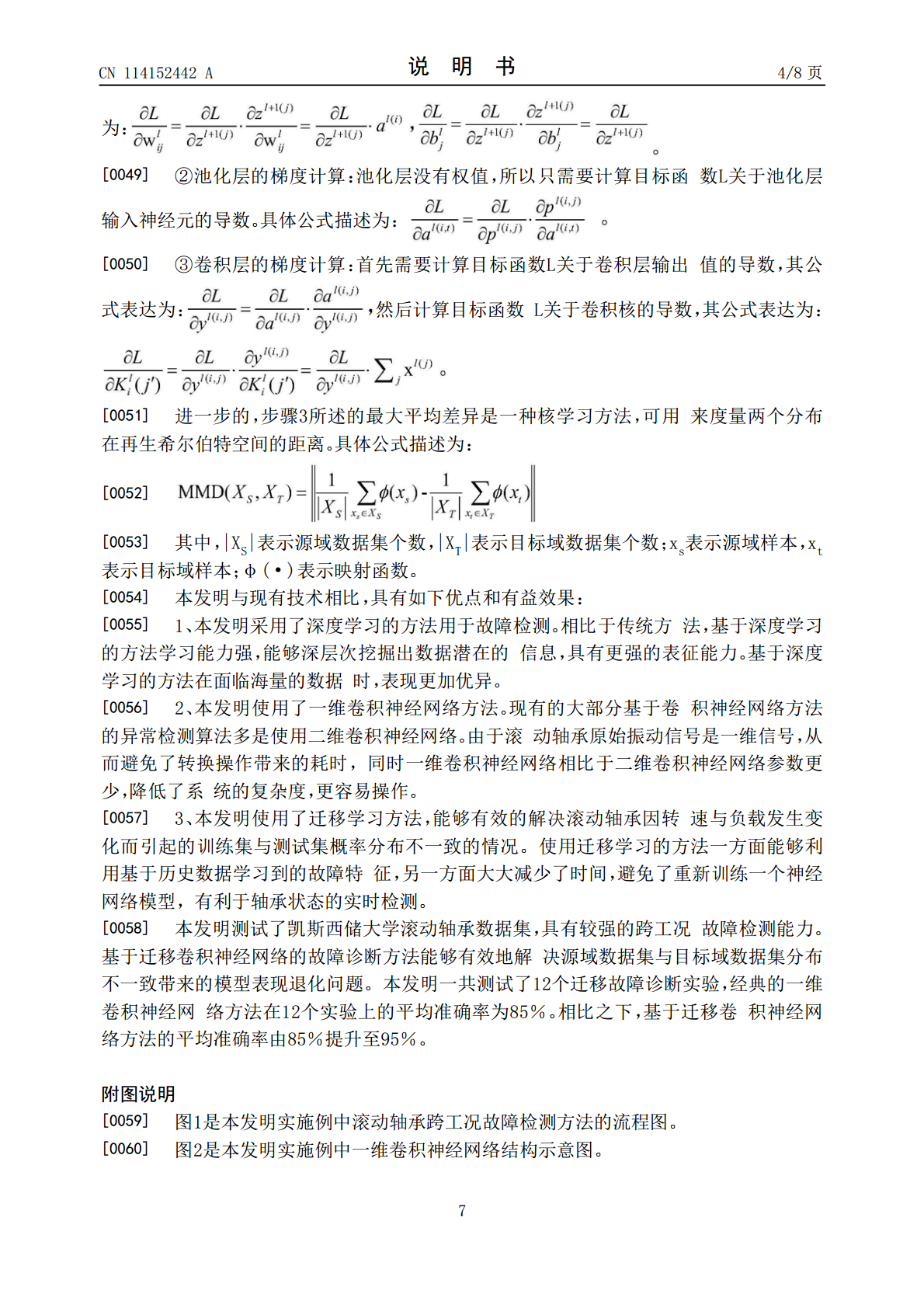
4/10
5/10
6/10
7/10

8/10
9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于迁移卷积神经网络的滚动轴承跨工况故障检测方法.pdf
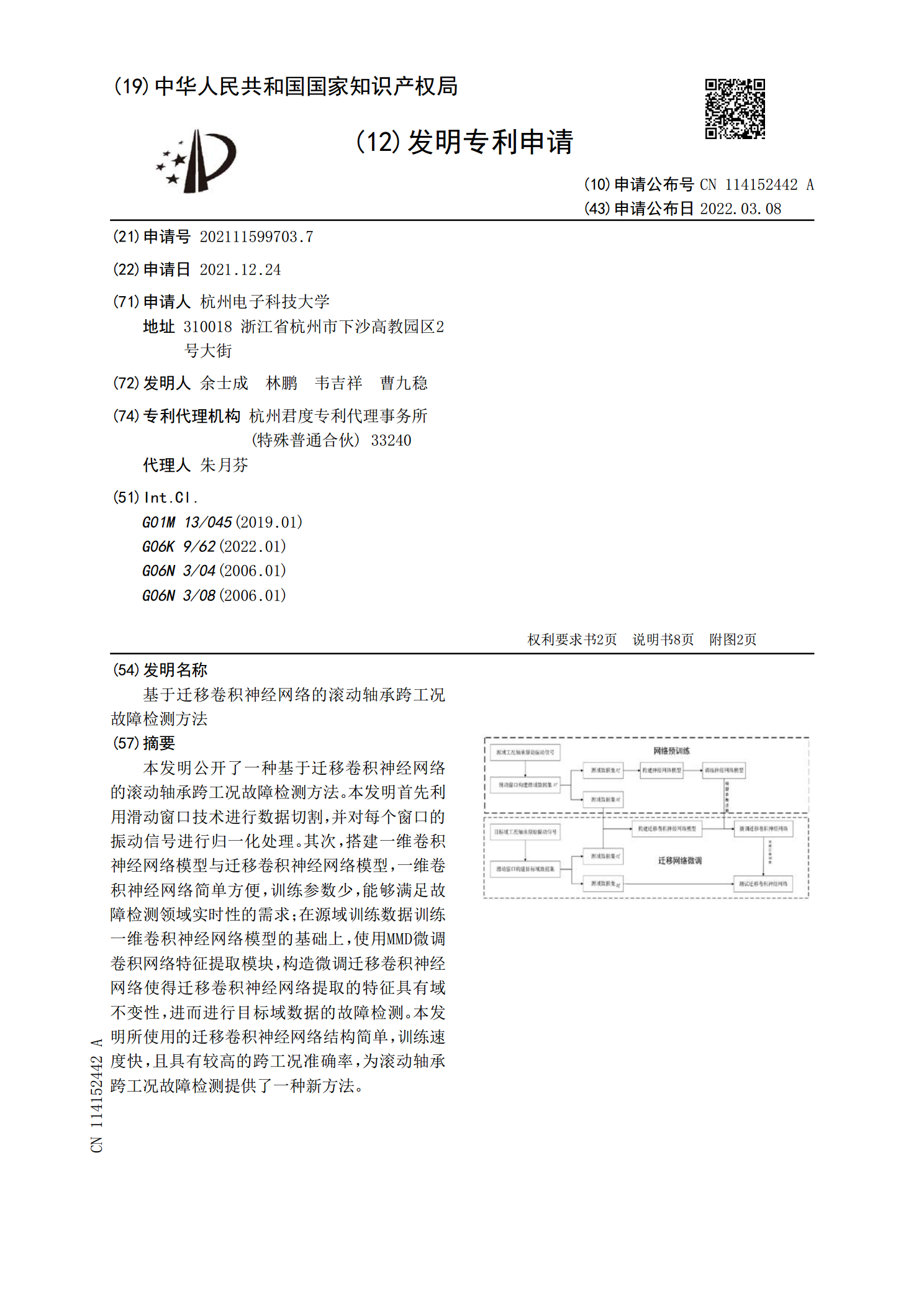
本发明公开了一种基于迁移卷积神经网络的滚动轴承跨工况故障检测方法。本发明首先利用滑动窗口技术进行数据切割,并对每个窗口的振动信号进行归一化处理。其次,搭建一维卷积神经网络模型与迁移卷积神经网络模型,一维卷积神经网络简单方便,训练参数少,能够满足故障检测领域实时性的需求;在源域训练数据训练一维卷积神经网络模型的基础上,使用MMD微调卷积网络特征提取模块,构造微调迁移卷积神经网络使得迁移卷积神经网络提取的特征具有域不变性,进而进行目标域数据的故障检测。本发明所使用的迁移卷积神经网络结构简单,训练速度快,且具有

跨工况的滚动轴承故障靶向迁移诊断方法及系统.pdf
本发明提供了一种跨工况的滚动轴承故障靶向迁移诊断方法及系统,解决了传统滚动轴承故障诊断算法难以提取源域和目标域中网络深层特征信息、无法实现有效的跨域故障诊断的问题。本发明利用特征编码器从输入的滚动轴承振动信号中精确地提取信号的高维映射特征;将该特征进一步输入到图构建层,挖掘数据的深层特征,并利用多通道核图卷积网络对实例图建模;利用基于差异和对抗的训练来最小化源域和目标域分布之间的距离,分类器则使用提取的域不变特征来完成跨域故障识别。本发明与其他方法相比较,在滚动轴承跨工况条件下,可以更好的提取深层特征用于
基于二维卷积神经网络的滚动轴承变工况故障诊断方法.pptx
汇报人:CONTENTSPARTONEPARTTWO卷积神经网络的基本结构卷积神经网络的学习过程二维卷积神经网络的优势PARTTHREE滚动轴承的故障类型及特征变工况对滚动轴承故障诊断的影响基于二维卷积神经网络的滚动轴承故障诊断流程诊断方法的有效性和可靠性验证PARTFOUR数据集的收集和预处理模型结构的确定和参数优化训练策略的选择和调整模型性能的评估和改进PARTFIVE实际应用中的问题与挑战诊断系统的实现和部署实践应用的效果和评价对未来工作的展望和建议汇报人:

基于特征迁移学习的变工况下滚动轴承故障诊断方法.docx
基于特征迁移学习的变工况下滚动轴承故障诊断方法基于特征迁移学习的变工况下滚动轴承故障诊断方法摘要:近年来,滚动轴承故障诊断在工业领域中变得越来越重要。由于工作环境的多变性,滚动轴承在不同工况下都可能会出现故障。然而,由于训练数据的不足和工况变化的复杂性,传统的故障诊断方法往往无法满足变工况下滚动轴承的准确诊断需求。为了克服这个问题,本文提出了一种基于特征迁移学习的变工况下滚动轴承故障诊断方法。通过利用已有工况下的训练数据和特征信息,将其迁移到新工况下进行故障诊断,从而提高诊断准确性和鲁棒性。实验结果表明,

基于卷积神经网络滚动轴承故障诊断建模方法研究.docx
基于卷积神经网络滚动轴承故障诊断建模方法研究基于卷积神经网络滚动轴承故障诊断建模方法研究摘要:滚动轴承是旋转设备中最常见也是最容易发生故障的部件之一,其故障诊断对于设备的安全运行和预测维护至关重要。本文针对滚动轴承故障诊断问题,提出了一种基于卷积神经网络的建模方法。首先,我们收集了滚动轴承的振动信号数据,并对其进行特征提取和预处理。然后,我们设计了一个卷积神经网络模型,并使用该模型来训练和测试滚动轴承的故障诊断模型。实验结果表明,该方法在滚动轴承故障预测和诊断方面具有较高的准确性和可靠性。关键词:滚动轴承