
一种基于全斯托克斯矢量的快速偏振成像方法.pdf

星菱****23


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于全斯托克斯矢量的快速偏振成像方法.pdf
本发明公开了一种基于全斯托克斯矢量的快速偏振成像方法,其基于旋转偏振延迟器进行全斯托克斯矢量偏振成像探测原理,将偏振延迟器安装于中空高速电机上高速旋转,并采用高精度同轴编码器实时测量偏振延迟器瞬时角度,与角度固定的偏振片结合,实现对成像镜头收集的入射光高速、高精度椭圆偏振调制;同时,采集光强探测器对连续旋转偏振延迟器瞬态偏振调制后的强度进行时间积分,并利用集成于数据采集及信号处理模块中的数据反演方法和冗余复用算法反演入射光偏振参数,实现对目标场景快速、高精度全斯托克斯矢量偏振成像探测。本发明极大提升全斯托

基于斯托克斯矢量的偏振成像仪器及其进展.docx
基于斯托克斯矢量的偏振成像仪器及其进展基于斯托克斯矢量的偏振成像仪器及其进展摘要:偏振成像技术在多个领域中起着重要作用,如材料科学、生物医学、制造业等。本文综述了基于斯托克斯矢量的偏振成像仪器及其进展,包括原理、应用和发展趋势。斯托克斯矢量是描述光的偏振状态的四维矢量,包含了光的振幅、相位以及偏振信息。基于斯托克斯矢量的偏振成像仪器可以实现对光场的全偏振信息的采集和表征,具有较高的精度和灵敏度。目前,基于斯托克斯矢量的偏振成像仪器已应用于材料科学、生物医学、制造业等领域,并取得了重要的科学研究和应用效果。

一种集成式的全斯托克斯偏振成像方法.pdf
本发明公开了一种集成式的全斯托克斯偏振成像方法,具体步骤包括:(1)设计像素化偏振敏感光子器件,每个像素包括两种或者两种以上的各向异性纳米单元,使得两种正交的偏振光传播通过单个像素之后的归一化振幅差在0.02以上;(2)使用不同波长的单色光入射到所述像素化偏振敏感光子器件,同时改变入射光的偏振态,表征得到不同偏振态下光子器件每个像素的光谱,获取先验知识;(3)搭建成像系统,对成像场景进行光学采集;(4)构建并训练重建算法,重建全斯托克斯参量。本发明构建的偏振敏感的像素化光学器件可完成全偏振的光学调制,而且
一种基于单片式全介质空间复用超透镜的宽带全斯托克斯偏振-光谱成像装置.pdf
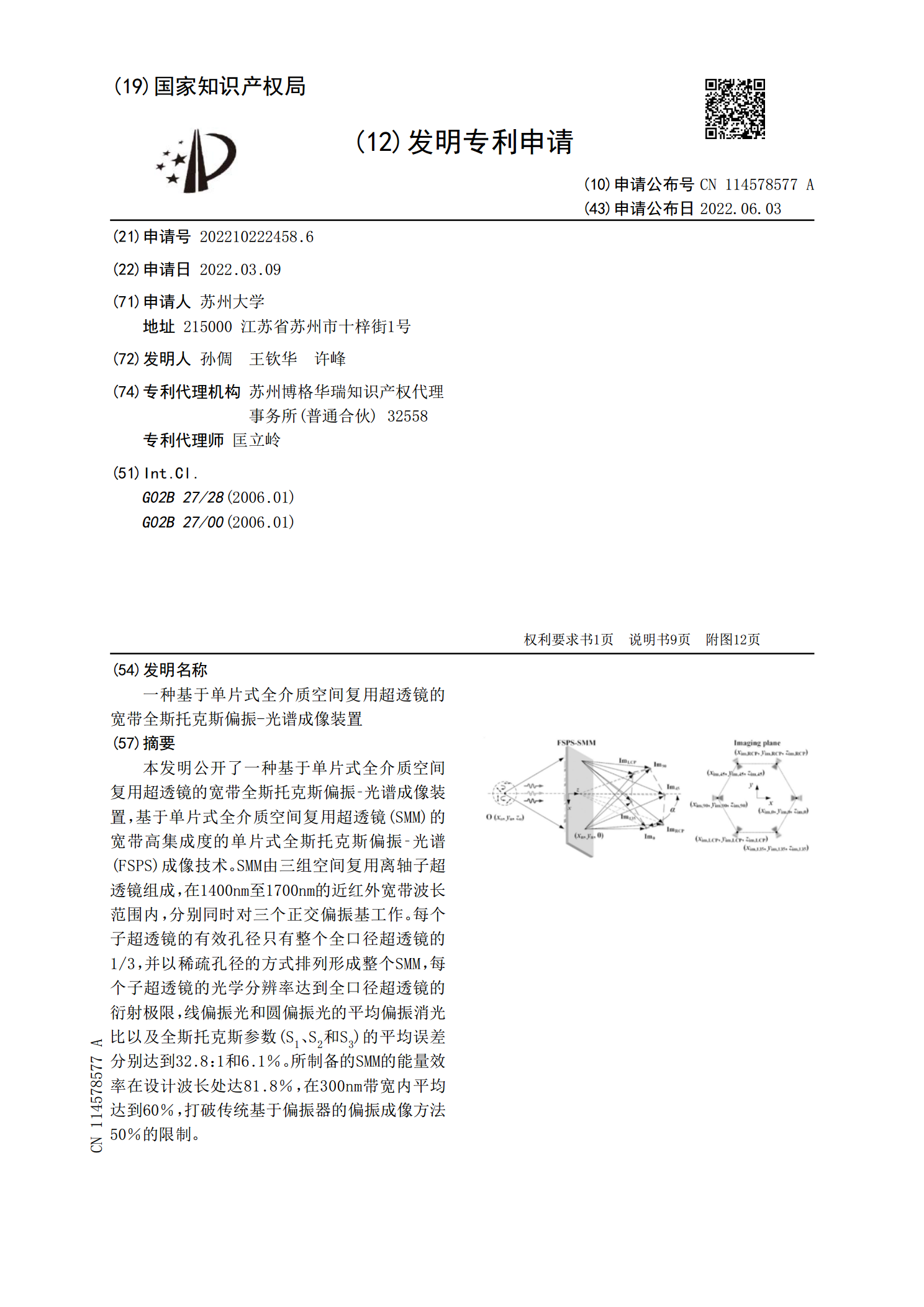
本发明公开了一种基于单片式全介质空间复用超透镜的宽带全斯托克斯偏振?光谱成像装置,基于单片式全介质空间复用超透镜(SMM)的宽带高集成度的单片式全斯托克斯偏振?光谱(FSPS)成像技术。SMM由三组空间复用离轴子超透镜组成,在1400nm至1700nm的近红外宽带波长范围内,分别同时对三个正交偏振基工作。每个子超透镜的有效孔径只有整个全口径超透镜的1/3,并以稀疏孔径的方式排列形成整个SMM,每个子超透镜的光学分辨率达到全口径超透镜的衍射极限,线偏振光和圆偏振光的平均偏振消光比以及全斯托克斯参数(S<ba

基于相位延迟器和彩色线偏振相机的全stokes矢量成像方法.pdf
本发明提出基于相位延迟器和彩色线偏振相机的全stokes矢量成像方法,使用分焦平面彩色线偏振相机、图像延迟器、液晶可控相位延迟器进行彩色全stokes矢量成像;所述方法采用的成像装置中,镜头、液晶可控相位延迟器、图像延迟器、分焦平面彩色线偏振相机自前往后安装于同一直线上,待拍摄的目标物置于镜头前方成像清晰的物距处,液晶可控相位延迟器和线偏振相机连接用以进行控制和数据处理的计算机,所述方法通过多幅不同角度的线偏振图像与反演矩阵相乘来得到目标物的全stokes矢量图像;本发明能克服传统偏振成像不能同时测量色彩