
一种负压爬壁机器人.pdf

玉怡****文档


1/10

2/10

3/10

4/10
5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种负压爬壁机器人.pdf
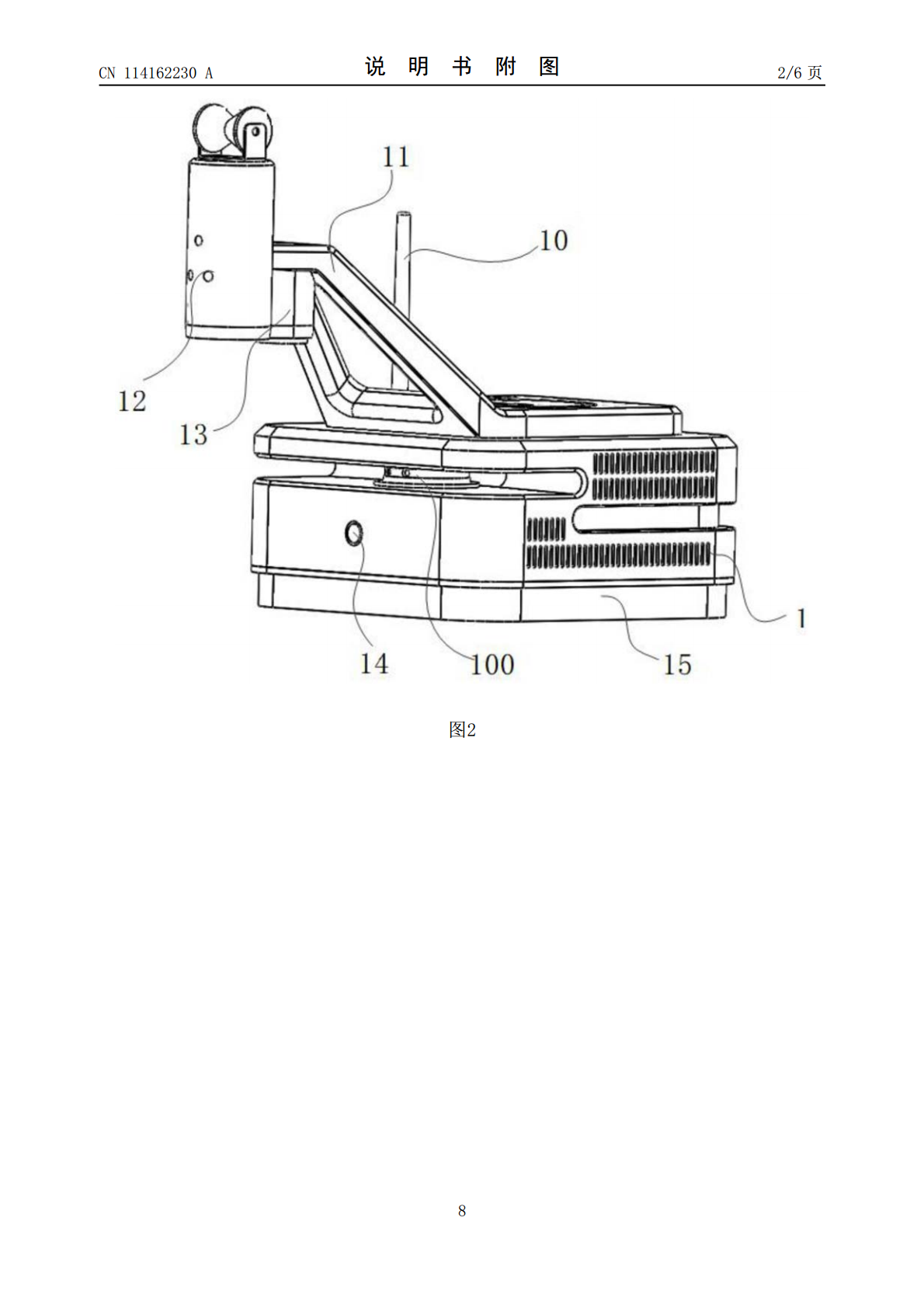
本发明公开了一种负压爬壁机器人,包括机体和设于机体底部、用于驱动机体移动的底盘机构,底盘机构包括若干个呈环形阵列状设置在机体的底部的吸盘组件,多个吸盘组件的顶部的顶部均通过球形接头与机体活动连接,球形接头的四周均设有平衡弹簧,任一吸盘组件包括连接板,环形设置在连接板底部边缘的密封圈,若干个设置在连接板底部、与密封圈围绕的空间相连通并形成负压的负压风仓,以及安装在连接板底部、用于驱动机体行走的行走组件,负压风仓的内部安装有负压风机,采用上述方案,本发明具有结构简单、使用可靠、可在起伏不平的壁面上进行稳定吸附

一种负压型爬壁机器人.pdf
本发明公开了一种负压型爬壁机器人,其结构包括左履带、负压控制装置、支撑架、LED补光灯、LED控制器、监控仪、无线接收器、旋转底座、密封气囊、右履带、活动轴承、吸气传动齿、固定器、固定螺栓、主机控制装置,左履带与右履带相平行,左履带通过主机控制装置与右履带相连接,发生装置正上方设有负压控制装置,负压控制装置通过固定螺栓与主机控制装置固定连接,本发明的有益效果:监控仪通过旋转底座、负压控制装置与主机控制装置电连接,监控仪由第一录像头、录像控制主机、活动减震底座、第二录像头、红外感应器组成,就提供了录像监控功

一种负压吸附式爬壁机器人.pdf
本发明公开了一种负压吸附式爬壁机器人,包括负压发生装置、控制装置、支撑及密封装置和移动装置;机器人质心同后轮之间的距离与前后行走车轮跨距的比值范围为小于等于三分之一。机器人的负压发生装置中的叶轮和泵体之间采用两道字形迷宫式间隙密封。机器人的底板边缘的密封带固连在底板上,密封带内部填充海绵。机器人的底板边缘的密封带固连在底板上,密封带内部填充海绵。该密封带通过安装压条固定在底板上或者胶粘在底板上。密封带呈无缝整体结构,材料为防雨绸,机器人的底板上设置若干通气孔。本发明的机器人结构简单、小型高效、具有自助实现

一种凸轮式负压吸附的爬壁机器人.pdf
本发明公开了一种凸轮式负压吸附的爬壁机器人,通过自身的反凸轮机构和无源真空吸附机构实现吸盘负压吸附功能,摆脱了真空源设备带来的限制;通过机械结构使真空吸盘吸附和脱离过程变得容易,负压实现机构简单,吸盘吸附力大;吸附转向机构避免了履带式机器人最小转弯半径的限制,实现了原地转向功能。吸附移动机构位于机器人主底板两侧,转向动力机构固定在主底板上,转向盘组件通过伸缩螺纹杆与转向动力机构相连;转向辅助机构安装在主底板上,通过调整凸轮轨迹槽的位置使吸附转向机构工作。本发明通过将直线移动部分和转向部分采用螺纹传动方式连

多腔负压吸附型爬壁机器人.pdf
一种多腔负压吸附型爬壁机器人涉及一种机器人,特别涉及一种具有多腔室结构且利用负压吸附墙壁的机器人。本发明包括负压发生装置和驱动部分,其特征在于:所述的负压发生装置包括一个主负压发生装置和可拆卸的多个辅助负压发生装置,负压装置的高度可调且在其内安装有带风扇的交流电动机,在负压发生装置的下部安装弹性密封垫,在弹性密封垫上加装滚珠(28),所述的驱动部分放置于负压发生装置的外面;所述的爬壁机器人上携带一个滑轮。