
空间非合作目标相对导航地面验证系统.pdf

一吃****书竹

1/10

2/10
3/10

4/10

5/10
6/10
7/10

8/10

9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

空间非合作目标相对导航地面验证系统.pdf
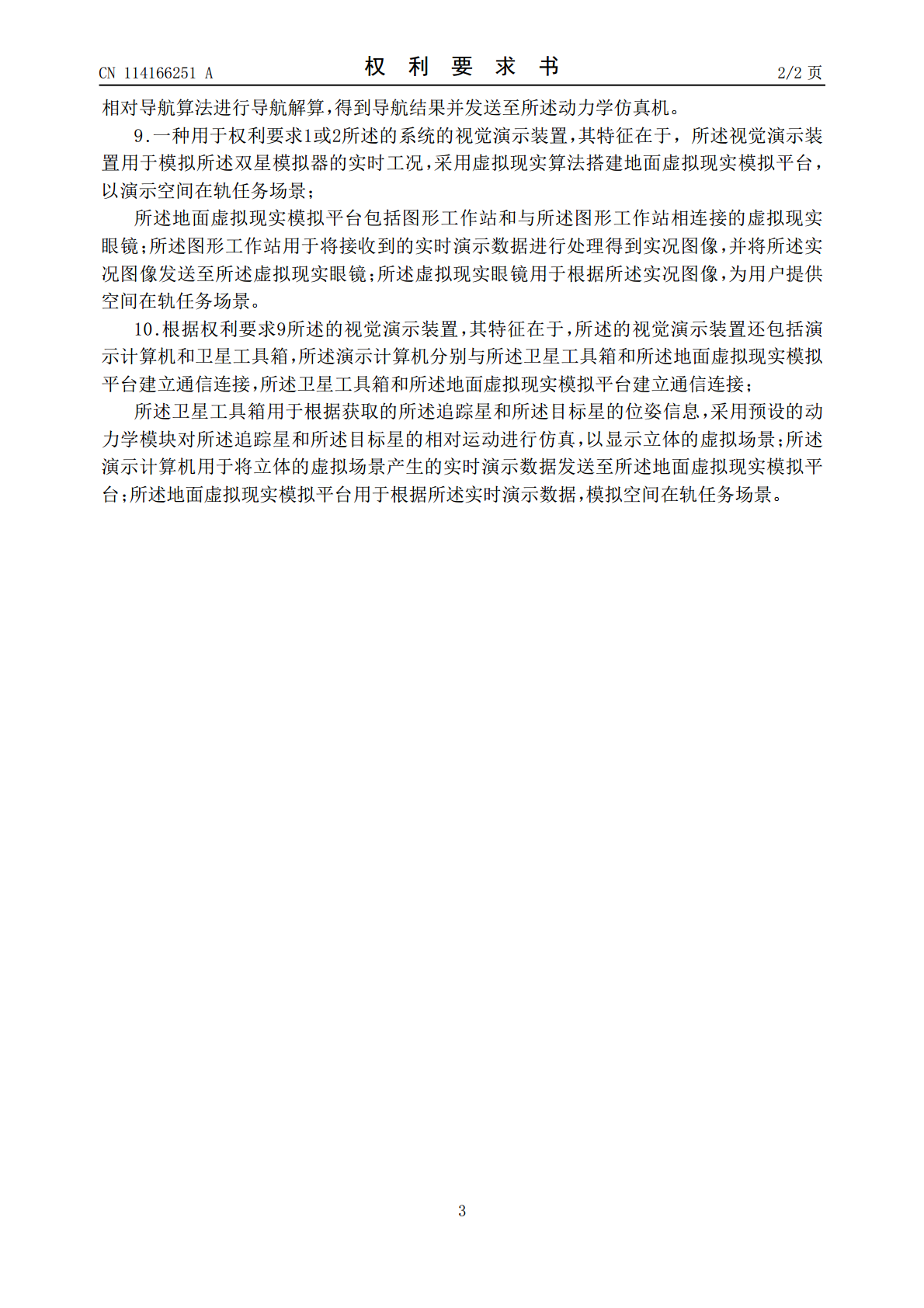
本发明提供了一种空间非合作目标相对导航地面验证系统,该系统包括:双星模拟器、视觉相对导航装置、动力学仿真机、电控装置和综合监控装置,视觉相对导航装置用于获取双星模拟器的位姿信息进行导航解算,得到导航结果并发送至动力学仿真机;动力学仿真机用于根据接收到的所述导航结果,对所述追踪星和所述目标星进行在轨轨道姿态动力学仿真,确定追踪星的实时动力学数据和目标星的实时动力学数据并发送至电控装置;综合监控装置用于生成控制指令并发送至双星模拟器。该系统能够有效地对非合作目标的相对导航算法进行高精度验证,提高了系统的适用性

卫星编队对空间非合作目标测距相对导航精度分析.docx
卫星编队对空间非合作目标测距相对导航精度分析随着卫星技术的不断发展,卫星编队对空间非合作目标测距相对导航成为了热门话题。空间非合作目标包括太空垃圾、小行星、长时间运行的卫星等。对这些目标进行测距相对导航能够帮助我们更好地了解它们的状态和动态,以及为日后可能的任务和探索提供支持。本文将从卫星编队测距原理、影响因素和机载技术等方面详细介绍卫星编队对空间非合作目标测距相对导航的精度分析。一、卫星编队测距原理卫星编队测距相对导航技术主要根据卫星的有效载荷,从空间非合作目标发射出的信号,以及测距和追踪的距离来实现对
空间非合作目标光学跟瞄闭环验证系统.pdf
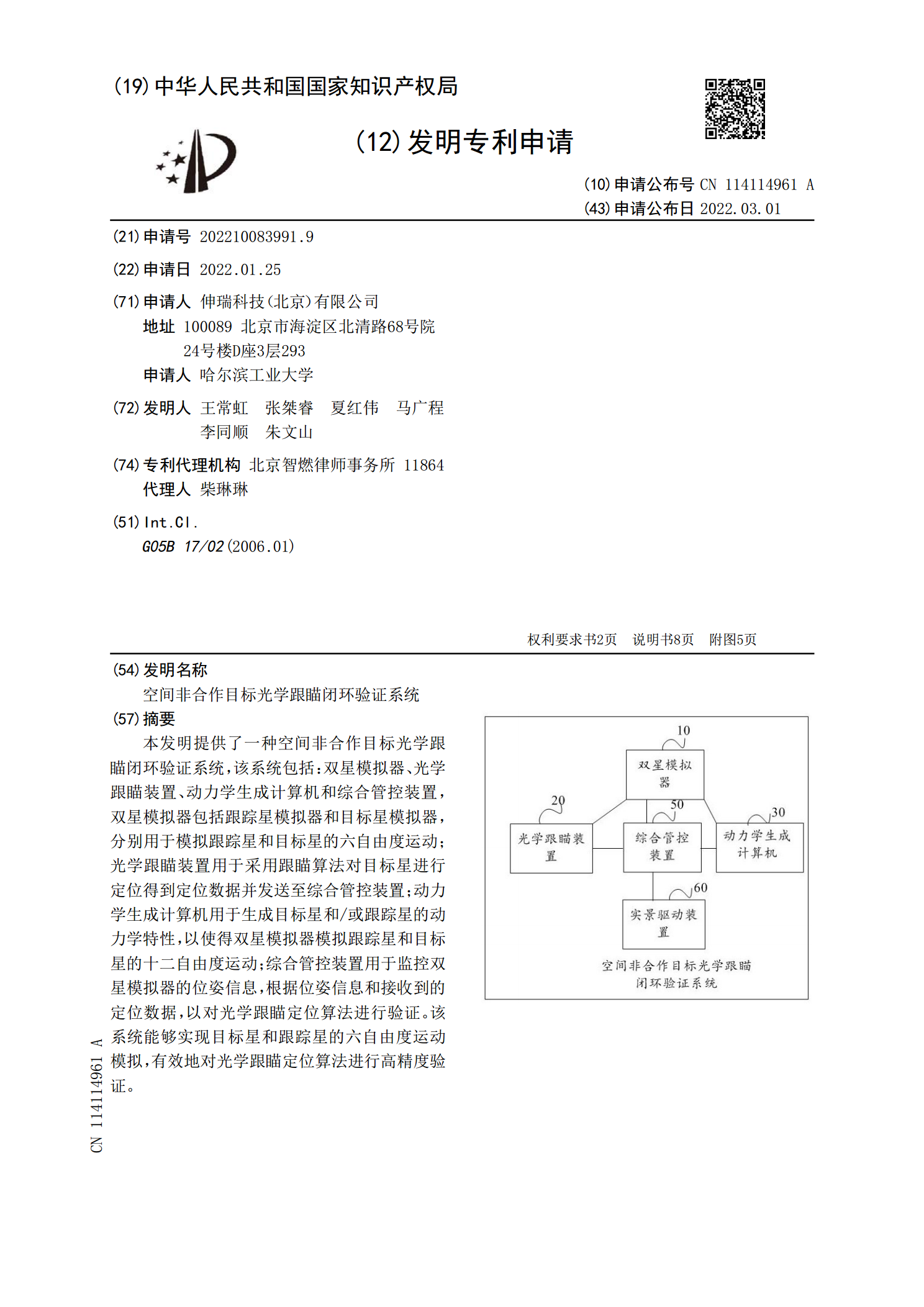
本发明提供了一种空间非合作目标光学跟瞄闭环验证系统,该系统包括:双星模拟器、光学跟瞄装置、动力学生成计算机和综合管控装置,双星模拟器包括跟踪星模拟器和目标星模拟器,分别用于模拟跟踪星和目标星的六自由度运动;光学跟瞄装置用于采用跟瞄算法对目标星进行定位得到定位数据并发送至综合管控装置;动力学生成计算机用于生成目标星和/或跟踪星的动力学特性,以使得双星模拟器模拟跟踪星和目标星的十二自由度运动;综合管控装置用于监控双星模拟器的位姿信息,根据位姿信息和接收到的定位数据,以对光学跟瞄定位算法进行验证。该系统能够实现

多软体臂空间目标消旋地面物理验证系统.pdf
多软体臂空间目标消旋地面物理验证系统,抓捕者模拟器、空间目标模拟器、软体臂气浮支撑均放置在气浮平台上;至少两条软体机械臂的根部安装在所述抓捕者模拟器上;软体臂气浮支撑用于抵消软体机械臂所受重力以及减小软体机械臂材料特性导致的变形下垂,在地面重力环境下使软体机械臂末端与空间微重力环境下软体机械臂末端运动规律一致;抓捕者模拟器、空间目标模拟器均通过气足作用使其处于空间微重力环境;目标控制器用于根据惯性测量单元IMU实时测量结果控制空间目标模拟器降维度模拟空间捕获目标的直线运动及自旋运动;所述抓捕控制器用于根据

基于点云的空间非合作目标初始相对位姿获取.docx
基于点云的空间非合作目标初始相对位姿获取基于点云的空间非合作目标初始相对位姿获取摘要近年来,点云处理技术在机器人、自动驾驶以及虚拟现实等领域中得到了广泛的应用。其中,点云的非合作目标初始相对位姿获取是一个关键问题。该问题指的是在没有任何先验信息的情况下,寻找点云场景中两个非连续目标之间的相对位姿。本文提出了一种基于点云的空间非合作目标初始相对位姿获取算法。该算法通过点云的特征提取、匹配和优化三个步骤实现目标初始相对位姿的获取。本文采用KITTI数据集进行了实验,结果表明该算法具有较好的效果和鲁棒性。关键词