
一种反向寻车自动寻路方法和电子设备.pdf

康平****ng


1/8

2/8

3/8
4/8
5/8

6/8

7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种反向寻车自动寻路方法和电子设备.pdf
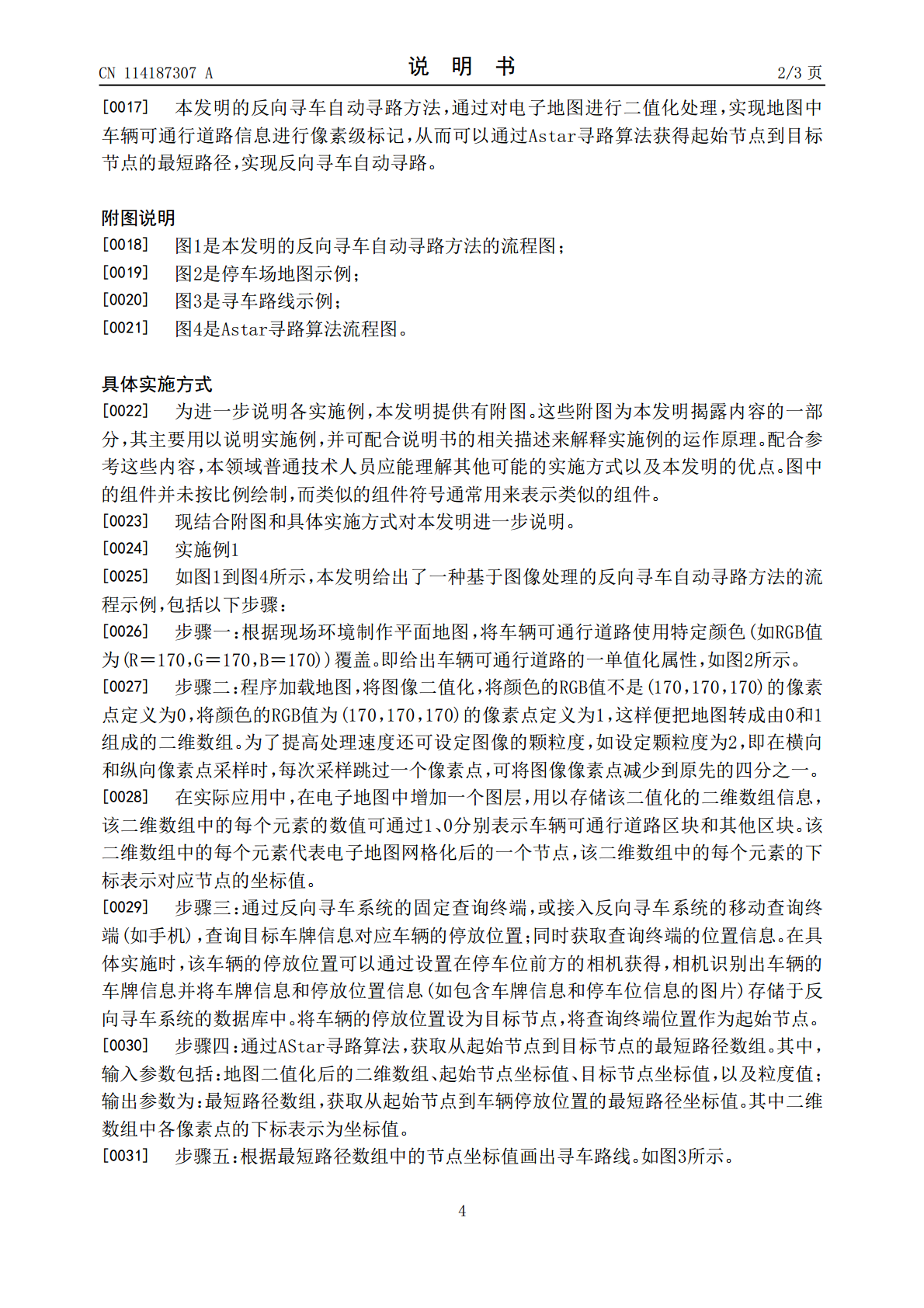
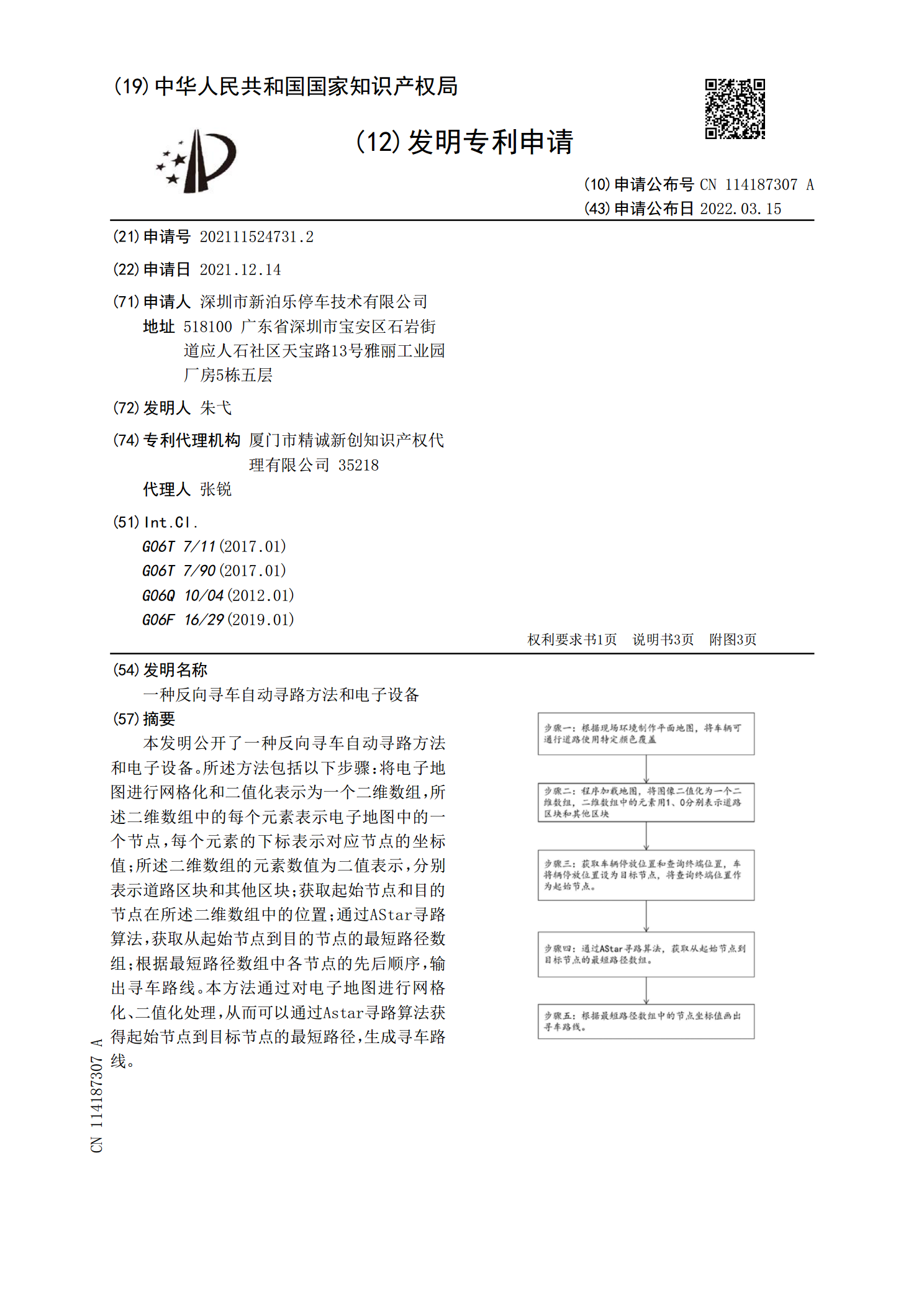
本发明公开了一种反向寻车自动寻路方法和电子设备。所述方法包括以下步骤:将电子地图进行网格化和二值化表示为一个二维数组,所述二维数组中的每个元素表示电子地图中的一个节点,每个元素的下标表示对应节点的坐标值;所述二维数组的元素数值为二值表示,分别表示道路区块和其他区块;获取起始节点和目的节点在所述二维数组中的位置;通过AStar寻路算法,获取从起始节点到目的节点的最短路径数组;根据最短路径数组中各节点的先后顺序,输出寻车路线。本方法通过对电子地图进行网格化、二值化处理,从而可以通过Astar寻路算法获得起始节
一种智能反向寻车方向语音指示及寻车方法.pdf
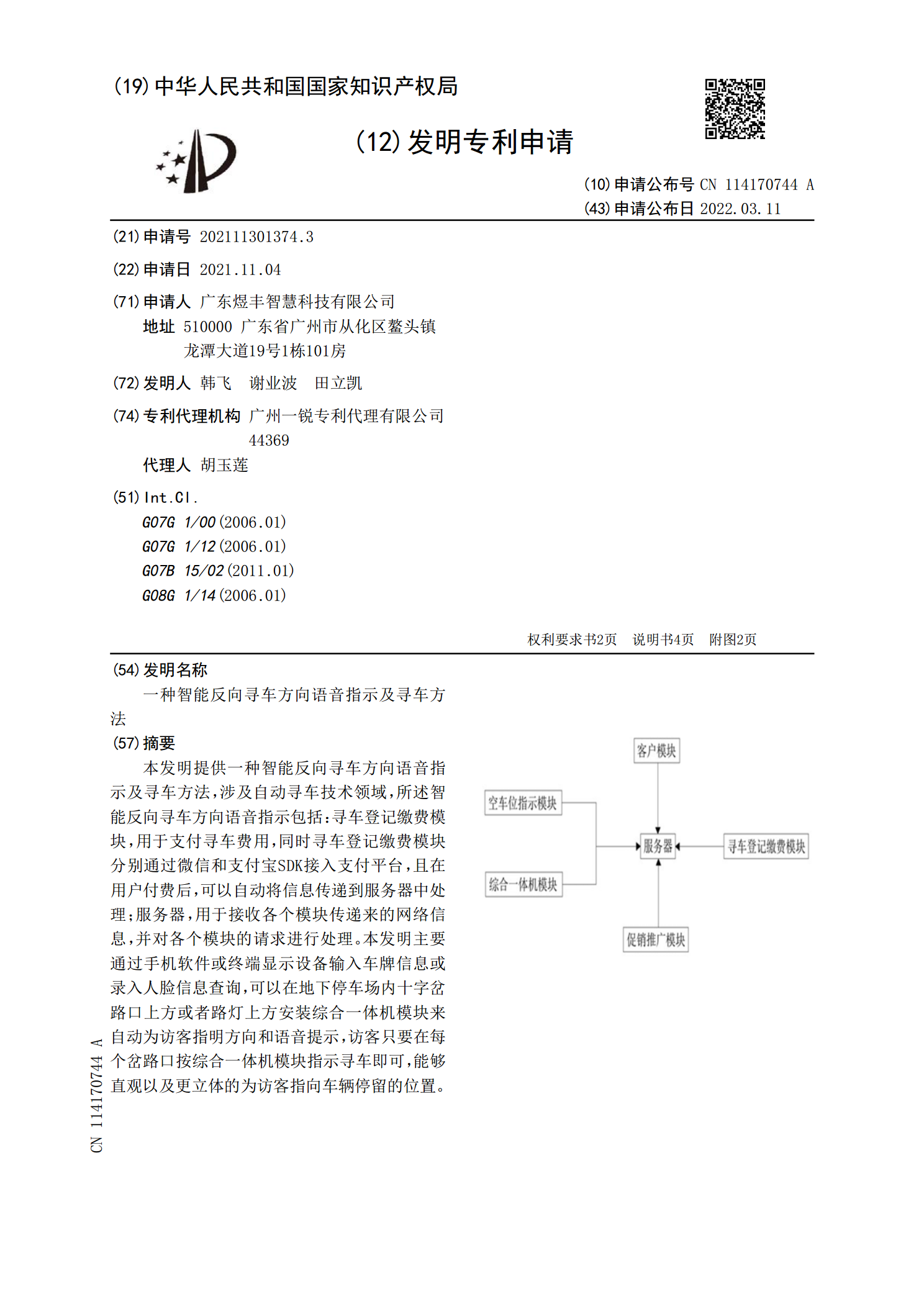
本发明提供一种智能反向寻车方向语音指示及寻车方法,涉及自动寻车技术领域,所述智能反向寻车方向语音指示包括:寻车登记缴费模块,用于支付寻车费用,同时寻车登记缴费模块分别通过微信和支付宝SDK接入支付平台,且在用户付费后,可以自动将信息传递到服务器中处理;服务器,用于接收各个模块传递来的网络信息,并对各个模块的请求进行处理。本发明主要通过手机软件或终端显示设备输入车牌信息或录入人脸信息查询,可以在地下停车场内十字岔路口上方或者路灯上方安装综合一体机模块来自动为访客指明方向和语音提示,访客只要在每个岔路口按综合

反向寻车系统.doc
大手控制www.bhccn.com|引|领|停|车|管|理|新|概|念|反向寻车系统反向寻车系统,行业内又称视频寻车系统,主要适用于大、中型地下停车场,广泛应用于火车站、购物中心、大型商务中心、政府机要单位等公共停车场。在大型的公共停车场内,由于停车场的空间比较大,车主往返所需要的时间比较长,环境及指示标志、诱导牌分布不合理等原因不易辨别方向,容易在停车场内迷失方向,寻找不到自己的车辆,因此反向寻车系统应运而生。反向寻车系统的原理反向寻车系统就是通过在每个停车位上装探头及超声波探测器、利用车牌识别系统对停

一种停车场反向寻车方法及装置.docx
一种停车场反向寻车方法及装置随着城市化进程的不断发展,私人汽车已成为大多数人出行的首选工具。然而,由于城市停车位不足,广泛存在车辆停放过程中困难找车的现象。为了解决这一问题,在停车场管理中,反向寻车成为了一种常用的解决方案。一、正向寻车存在问题在传统停车管理方式中,车主们将车子停放在停车场内,通常会将车辆停放在门口或者容易找到的位置。在车主找车的过程中,大多数人都会选择从进入停车场的位置开始反复寻车。然而,当停车场车位数众多,同时大型停车场停车位划分较为复杂,车主要花费大量时间和精力来寻找自己的车辆。在多

基于RFID技术的反向寻车系统及方法.pdf
本发明公开了一种基于RFID技术的反向寻车系统及方法,所述系统包括管理服务器,以及分别与管理服务器连接的车牌识别装置、RFID标签分发装置、若干个RFID标签阅读装置、若干个查询终端和若干个方向引导屏。车牌识别装置和RFID标签分发装置设置在停车场入口的道闸处,RFID标签阅读装置设置在停车场的停车区域内,查询终端设置在停车场区域内,方向引导屏设置在查询终端的附近或停车场的过道口处。该系统及方法采用车牌识别装置、RFID标签分发装置和RFID标签阅读装置相结合的形式,将车牌号和停车区域的信息相关联,能够更