
自动驾驶场景下基于改进faster-RCNN的小目标检测方法.pdf

雨巷****凝海

1/10
2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
自动驾驶场景下基于改进faster-RCNN的小目标检测方法.pdf
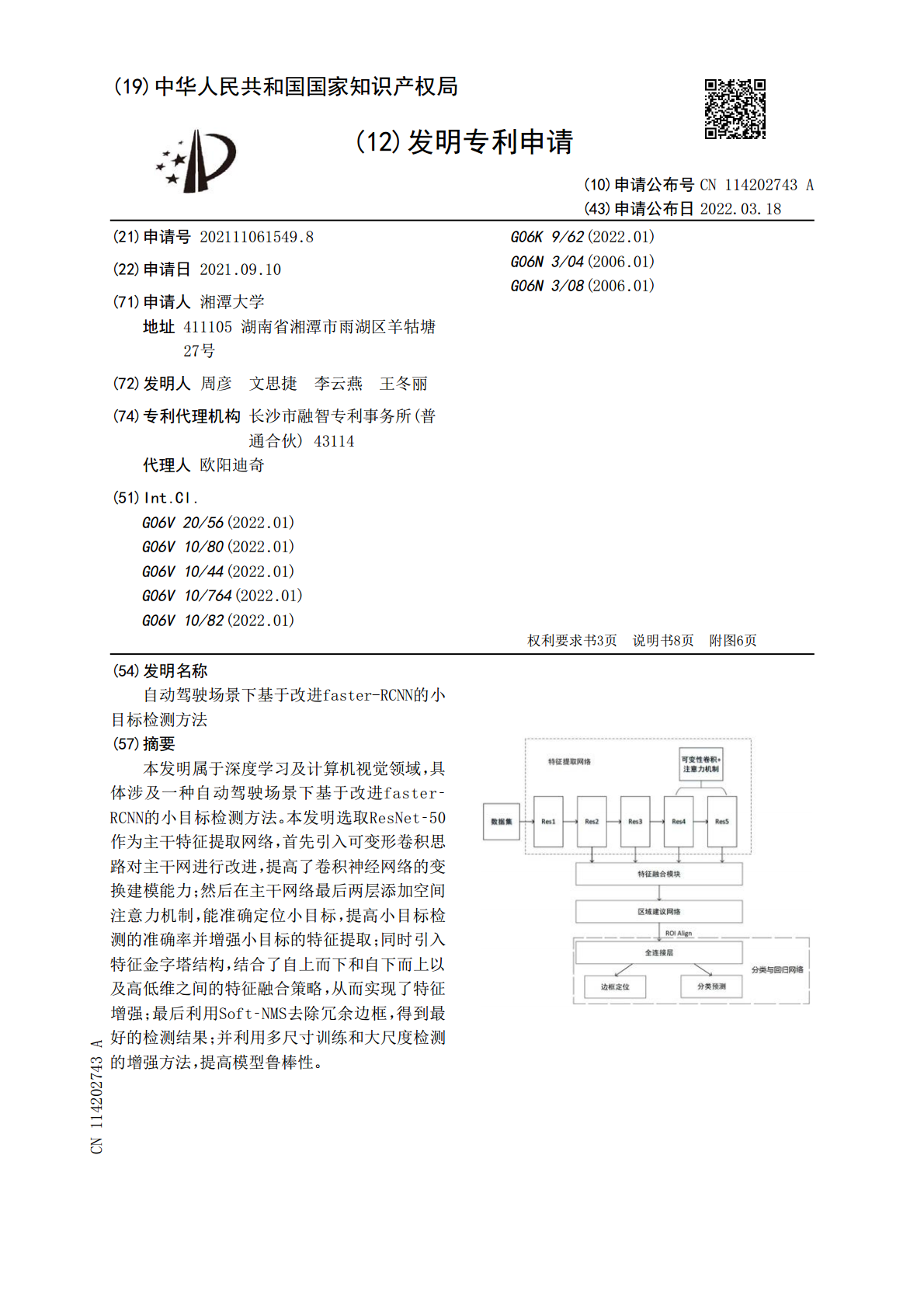
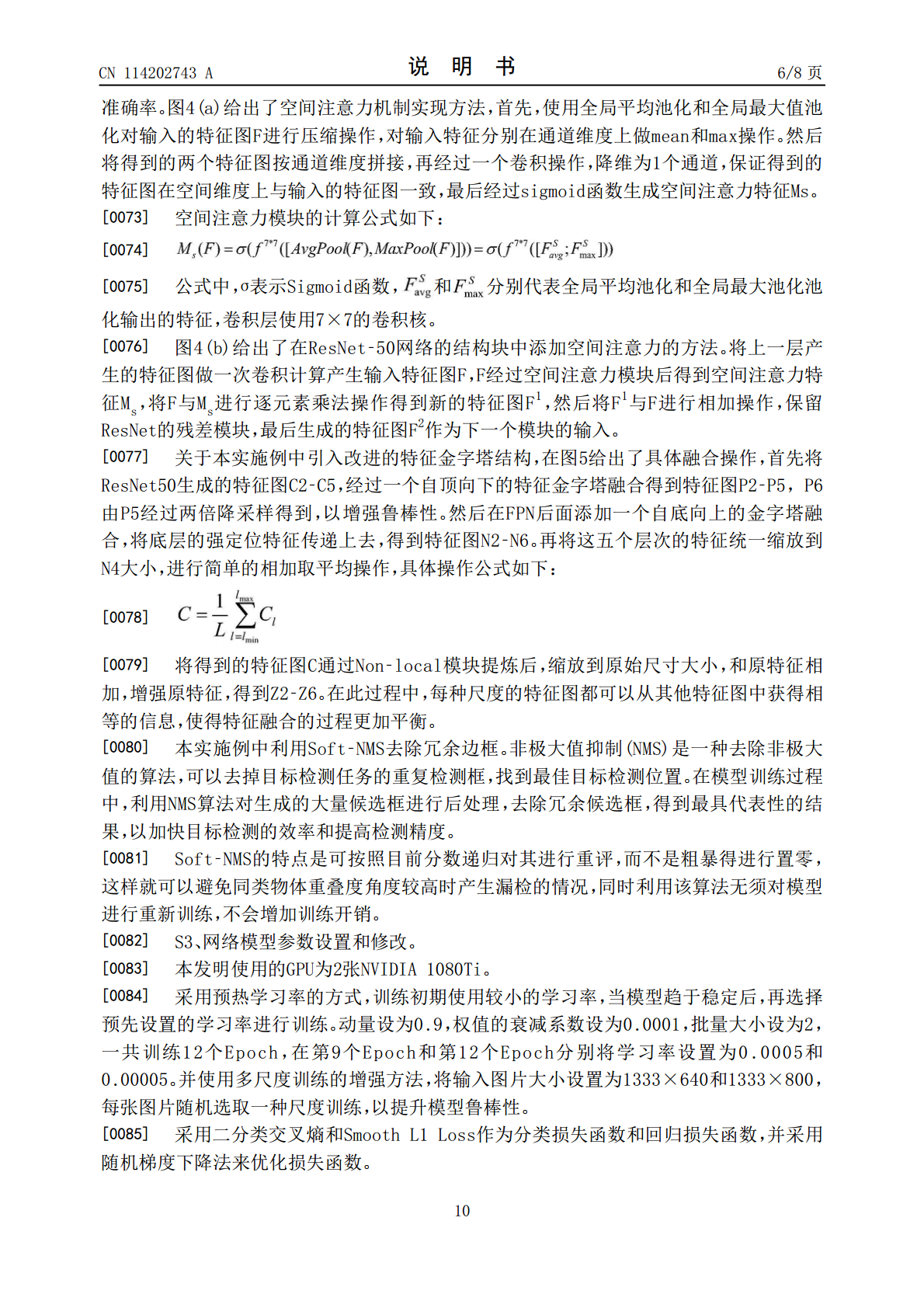
本发明属于深度学习及计算机视觉领域,具体涉及一种自动驾驶场景下基于改进faster‑RCNN的小目标检测方法。本发明选取ResNet‑50作为主干特征提取网络,首先引入可变形卷积思路对主干网进行改进,提高了卷积神经网络的变换建模能力;然后在主干网络最后两层添加空间注意力机制,能准确定位小目标,提高小目标检测的准确率并增强小目标的特征提取;同时引入特征金字塔结构,结合了自上而下和自下而上以及高低维之间的特征融合策略,从而实现了特征增强;最后利用Soft‑NMS去除冗余边框,得到最好的检测结果;并利用多尺寸训
一种基于特征增强的复杂场景下小目标检测方法.pdf
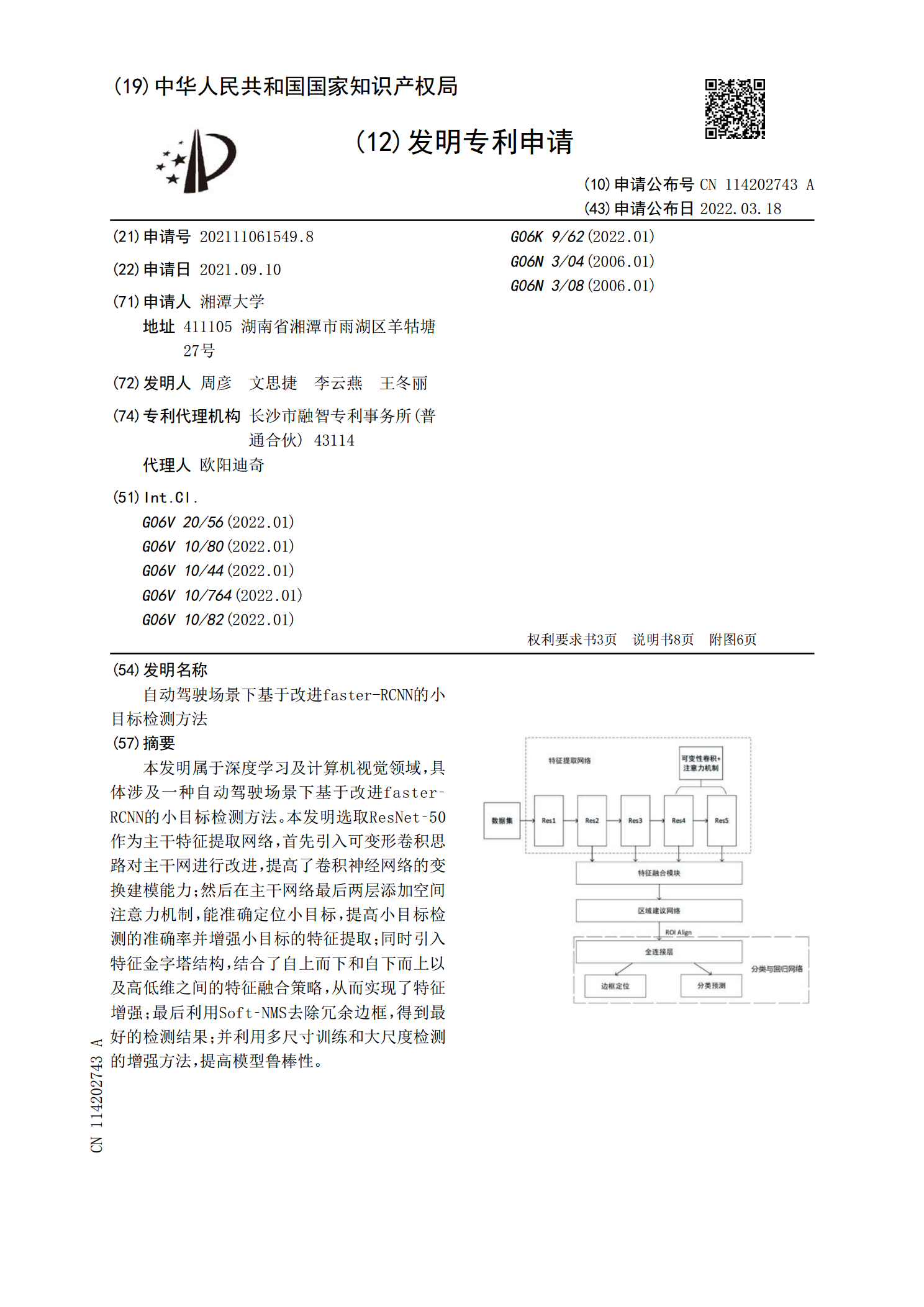
本发明属于计算机视觉和目标检测领域,具体涉及一种基于特征增强的复杂场景下小目标检测方法。本发明的技术方案是:首先提出Cutout‑DA数据增强方法,生成新的遮挡数据扩充至VisDrone2021数据集中,然后设计多尺度融合的特征增强路径聚合网络MSFE‑PANet,通过集成注意机制、特征融合以及针对小目标的网络预测尺度策略,获取到更丰富、细致的语义信息特征和空间信息特征,设计预测框排斥损失函数RB_Loss,最后训练模型。本发明可以增强深层特征图的强定位信息与浅层特征图的强语义信息相互融合,帮助网络在复杂
基于改进YOLOX模型的小目标检测方法.pdf
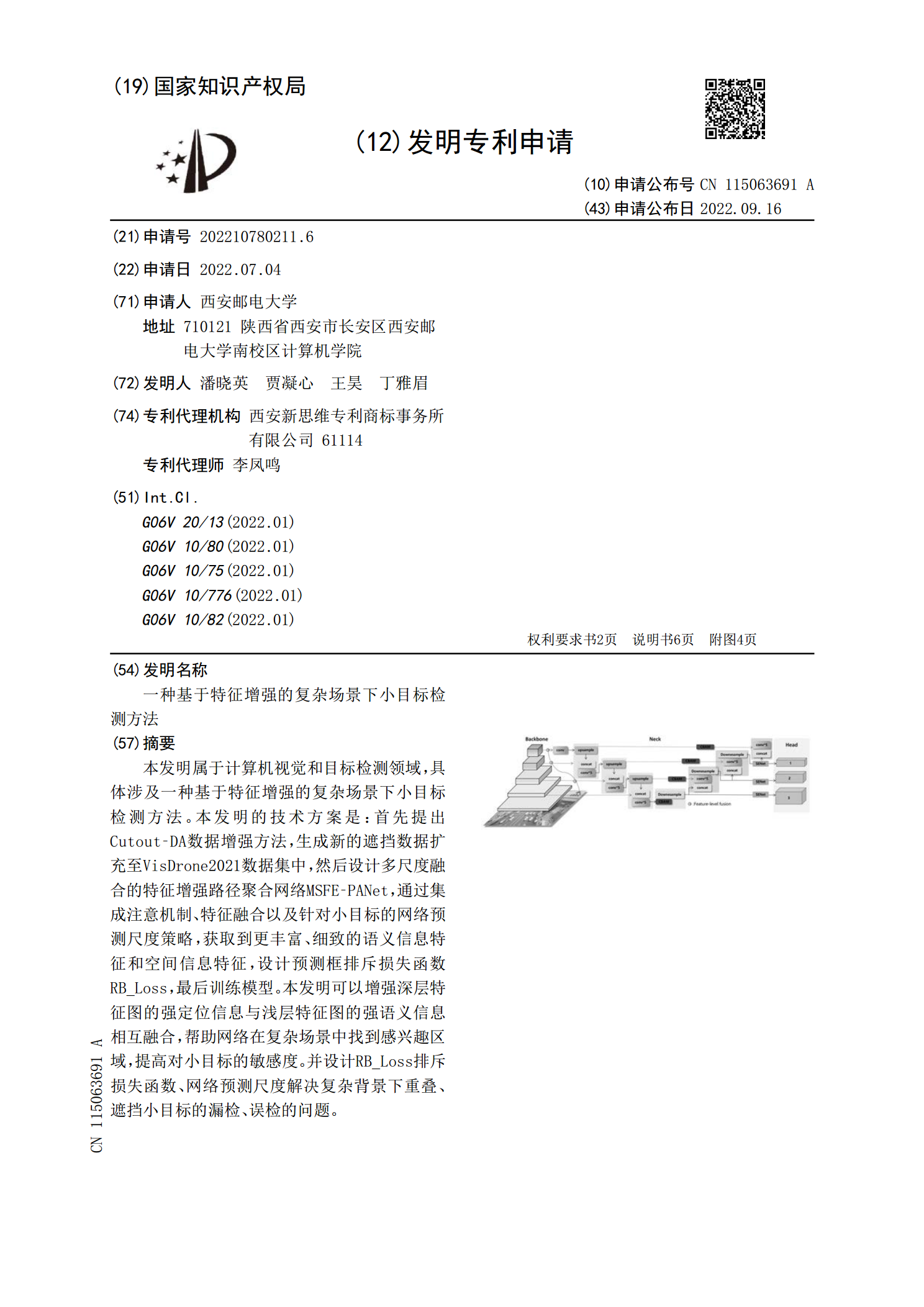
本发明涉及一种基于改进YOLOX模型的小目标检测方法。通过获取待检测图像,对待检测图像进行特征提取,得到多个初始特征,并将多个初始特征进行跨层特征融合,得到多个融合特征,根据多个融合特征的预测处理结果,得到针对该待检测图像的小目标检测结果。通过多层特征提取和跨层特征融合,使得小目标的浅层特征和深层特征相互融合处理,加强小目标特征提取效果,避免小目标特征丢失,提高对图像中小目标的检测效果。
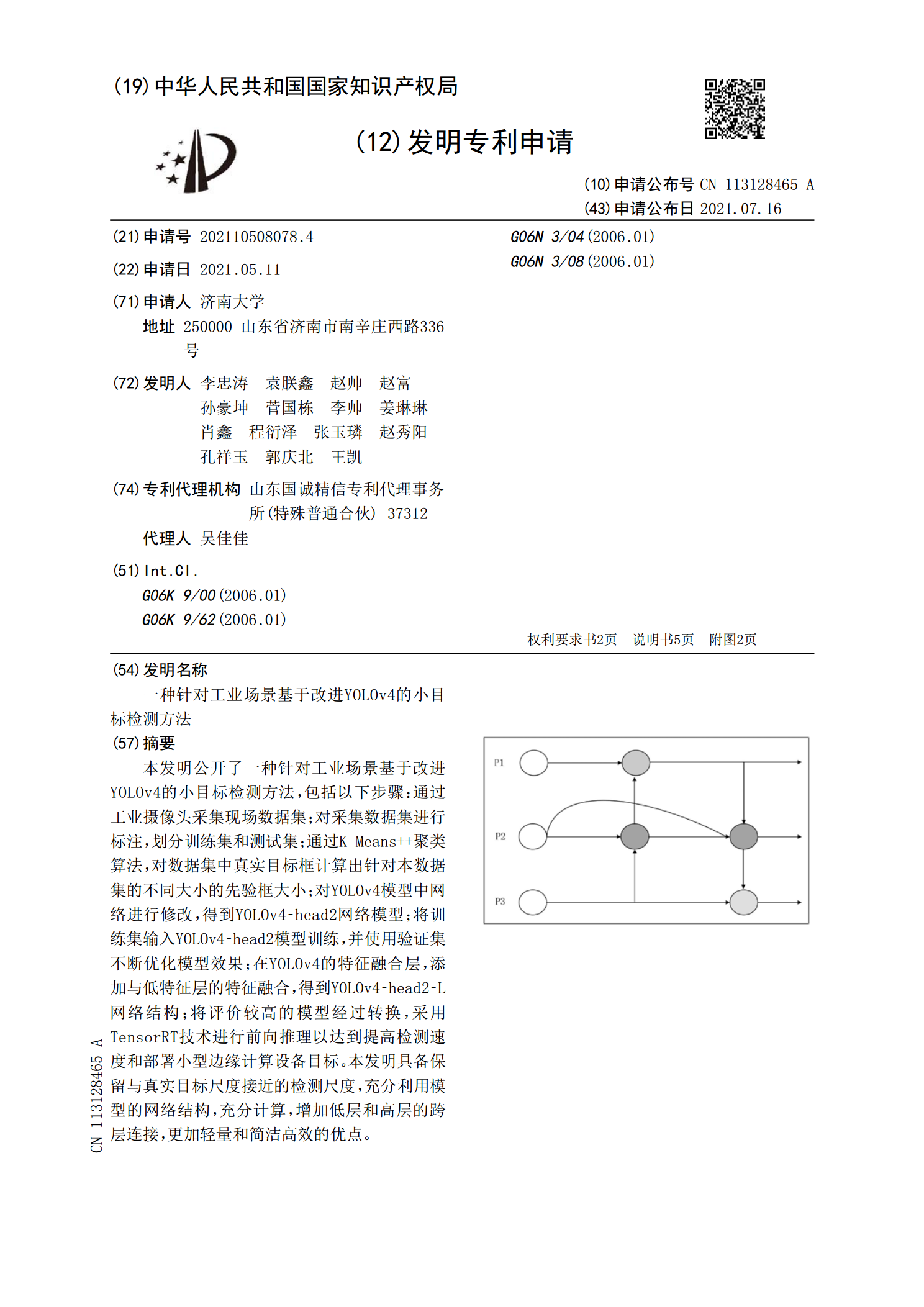
一种针对工业场景基于改进YOLOv4的小目标检测方法.pdf
本发明公开了一种针对工业场景基于改进YOLOv4的小目标检测方法,包括以下步骤:通过工业摄像头采集现场数据集;对采集数据集进行标注,划分训练集和测试集;通过K‑Means++聚类算法,对数据集中真实目标框计算出针对本数据集的不同大小的先验框大小;对YOLOv4模型中网络进行修改,得到YOLOv4‑head2网络模型;将训练集输入YOLOv4‑head2模型训练,并使用验证集不断优化模型效果;在YOLOv4的特征融合层,添加与低特征层的特征融合,得到YOLOv4‑head2‑L网络结构;将评价较高的模型经过
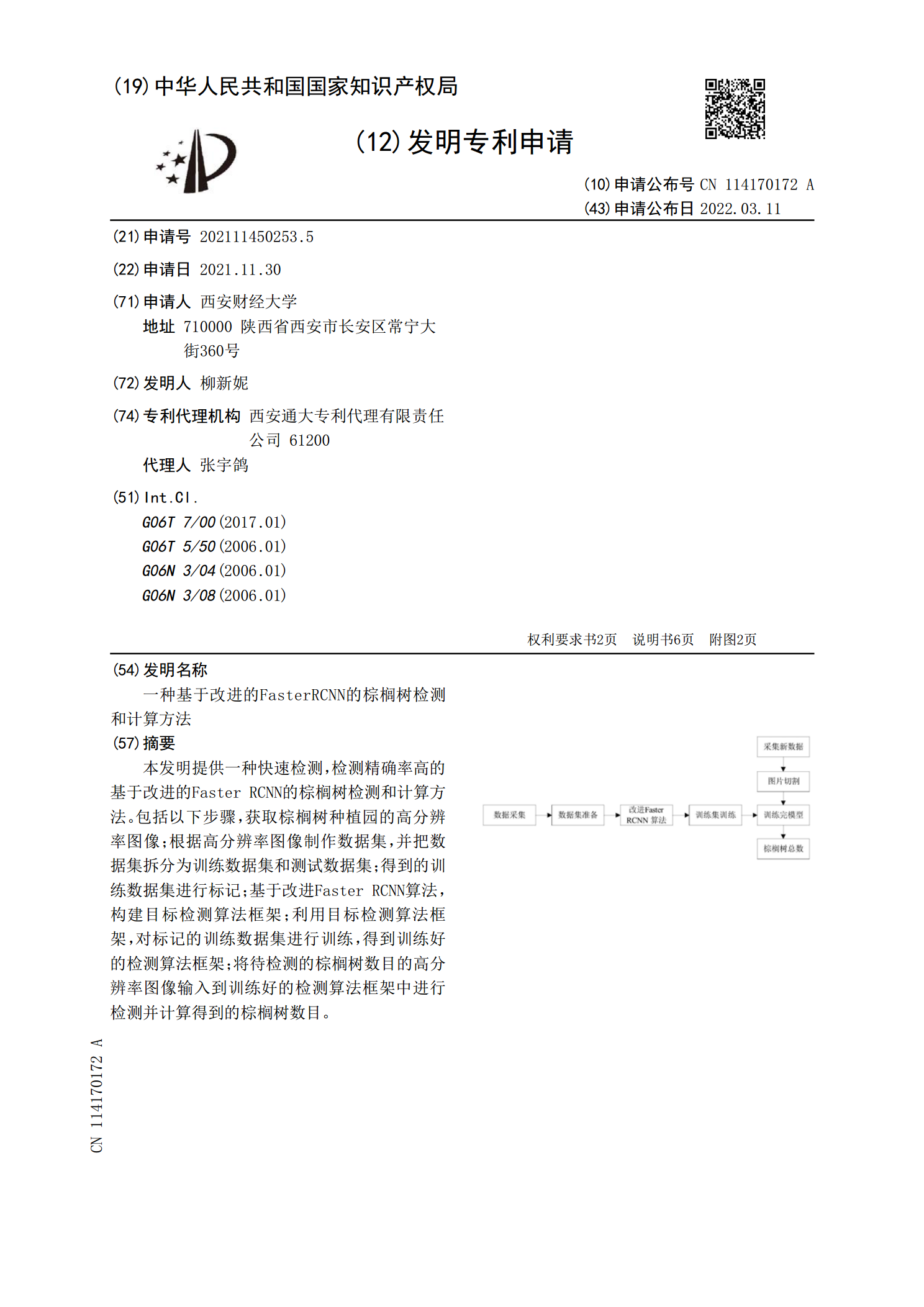
一种基于改进的FasterRCNN的棕榈树检测和计算方法.pdf
本发明提供一种快速检测,检测精确率高的基于改进的FasterRCNN的棕榈树检测和计算方法。包括以下步骤,获取棕榈树种植园的高分辨率图像;根据高分辨率图像制作数据集,并把数据集拆分为训练数据集和测试数据集;得到的训练数据集进行标记;基于改进FasterRCNN算法,构建目标检测算法框架;利用目标检测算法框架,对标记的训练数据集进行训练,得到训练好的检测算法框架;将待检测的棕榈树数目的高分辨率图像输入到训练好的检测算法框架中进行检测并计算得到的棕榈树数目。