
视频行人重识别的方法.pdf

含平****ng


1/10

2/10
3/10
4/10
5/10

6/10

7/10
8/10
9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
视频行人重识别的方法.pdf
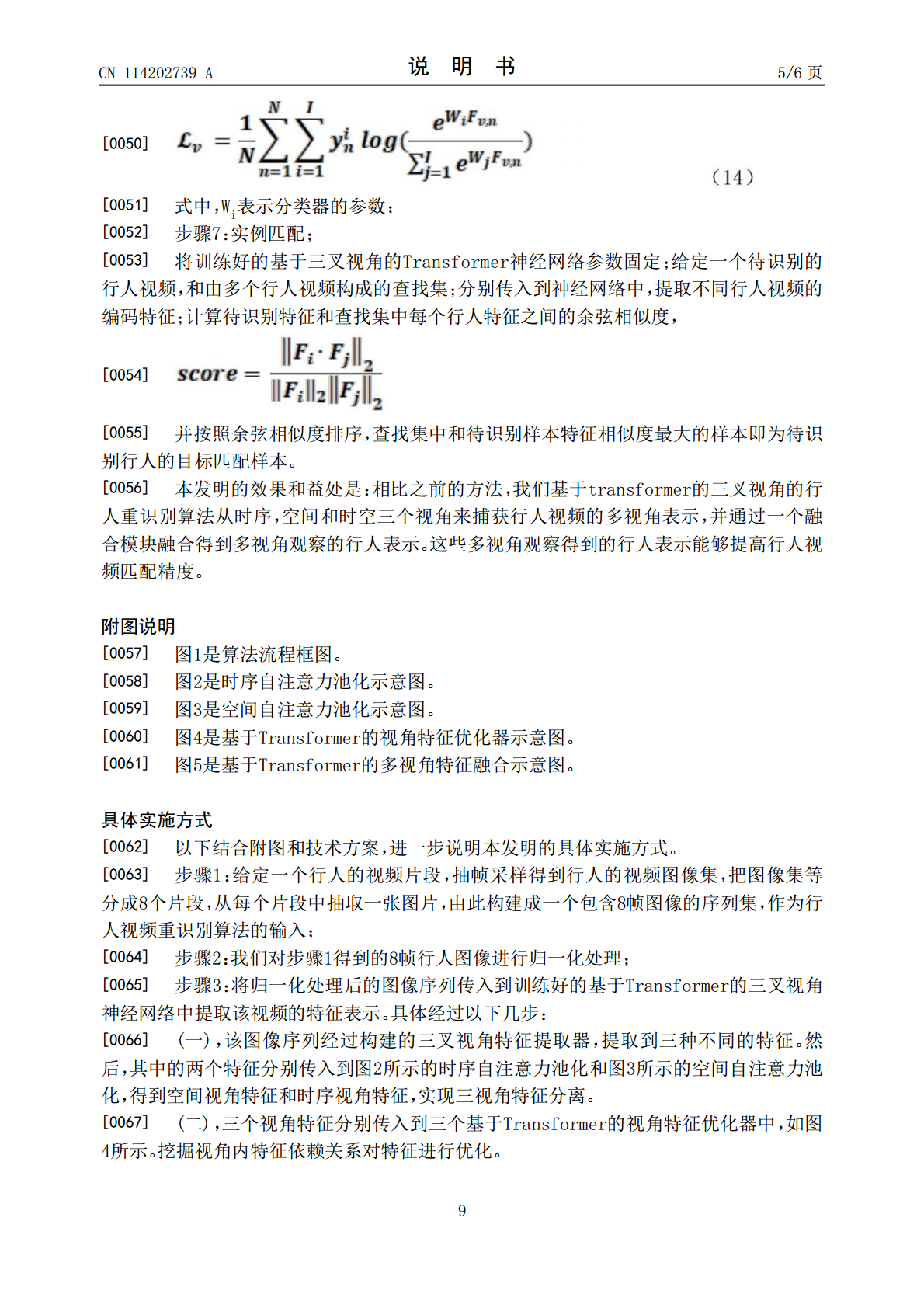
本发明属于视频行人重识别技术领域,提供了一种视频行人重识别的方法。本发明使用Transformer结构提取多视角特征来解决视频行人重识别任务。视频行人重识别目的是实现行人序列图片的跨摄像头匹配。本发明提出使用三叉网络分别获取行人视频的空间视角,时序视角和时空视角,以此获得在不同特征域的多视角观察。在单一的视角特征域内使用Transformer挖掘单视角特征关系,并优化视角特征。在跨视角特征域间使用Transformer探索多视角特征关系,并融合多视角信息得到更充分的特征表示。本发明可以提取行人视频更鲁棒、
一种用于视频行人重识别的视频序列编码与解码方法.pdf
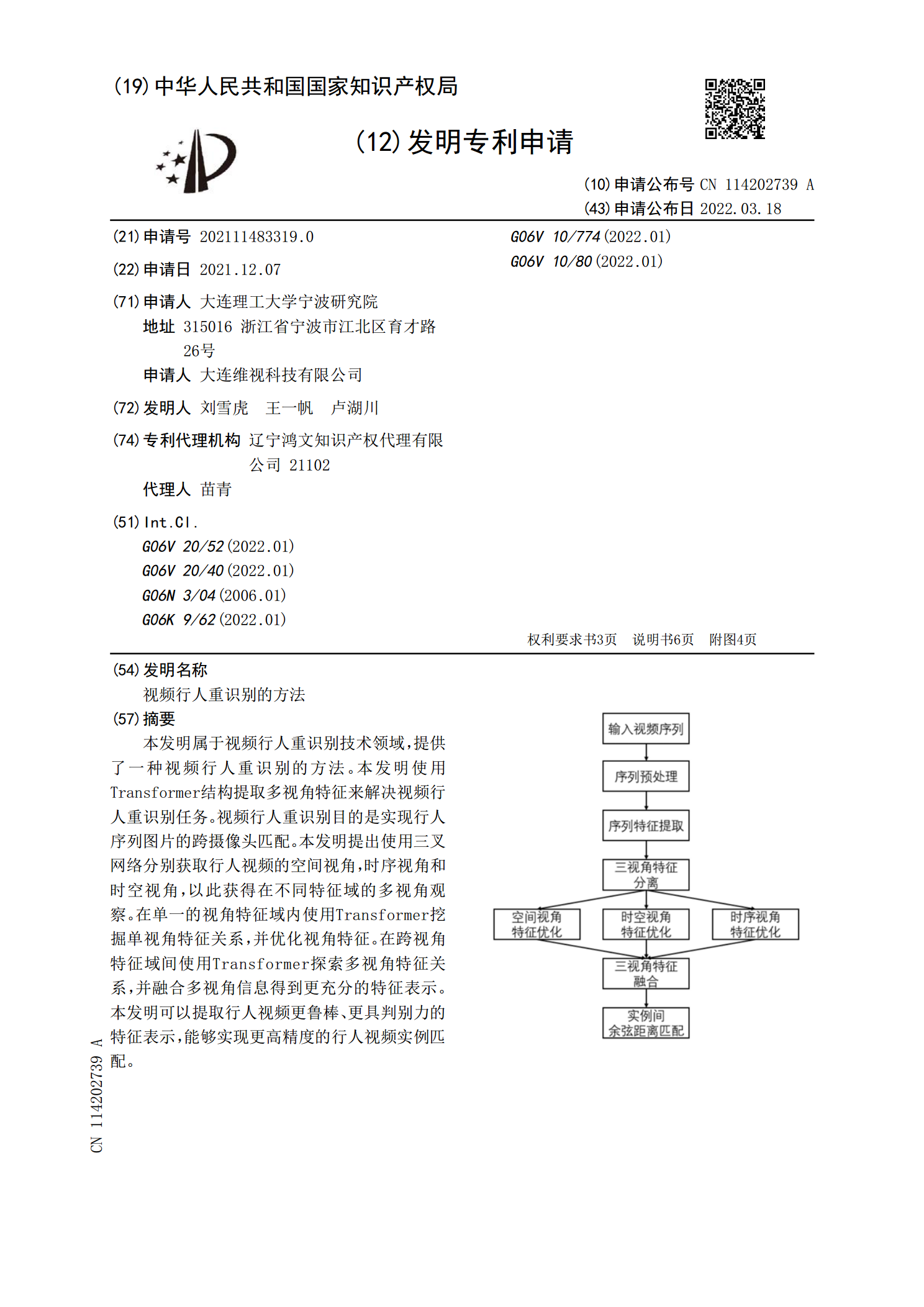
本发明公开了一种用于视频行人重识别的视频序列编码与解码方法,该方法在训练阶段,通过将标签图片特征与视频特征融合后输入生成器,然后使用标签图片作为重建标签,并以图像重建损失约束生成器生成的关键帧;然后将生成的关键帧送入图像特征提取模块进行视频特征恢复,并通过特征重建损失约束恢复出的视频特征,使其和原视频特征性能一致。在应用阶段,先用HSV‑Top‑K的方法挑选出K帧图片用于生成关键帧,然后将生成的关键帧,存入设备中,以降低存储开销。在需要检索时,用图像特征提取模块对生成的关键帧进行视频特征恢复,恢复出的特征

用于行人重识别的图像特征提取方法.pdf
本发明公布了一种用于行人重识别的图像特征提取方法,通过对齐局部描述子提取和分级全局特征提取,进行行人重识别;对齐局部描述子提取采用仿射变换对原图像进行处理,对相同区域的图像块特征进行求和池化操作而得到对齐局部描述子;对齐局部描述子保留图像内部块与块之间的空间信息;分级全局特征提取通过对定位的行人区域块进行分级,求取相应特征均值而得到全局特征。采用本发明技术方案,能够解决行人重识别中由于行人姿态变化等带来的特征不对齐问题,消除无关背景对重识别带来的影响,由此提高行人重识别的精度和鲁棒性。

视频中行人的识别的研究综述报告.pptx
视频中行人识别的研究综述目录添加章节标题引言行人识别的重要性和应用领域综述的目的和意义行人检测技术基于特征的方法基于深度学习的方法检测算法的性能评估行人跟踪技术基于滤波器的方法基于深度学习的方法跟踪算法的性能评估行人识别技术基于特征的方法基于深度学习的方法识别算法的性能评估行人识别的挑战与未来发展面临的挑战未来发展方向技术发展趋势结论与展望行人识别技术的研究成果总结对行人识别技术的未来展望THANKYOU
一种用于行人重识别的数据增强方法及系统.pdf
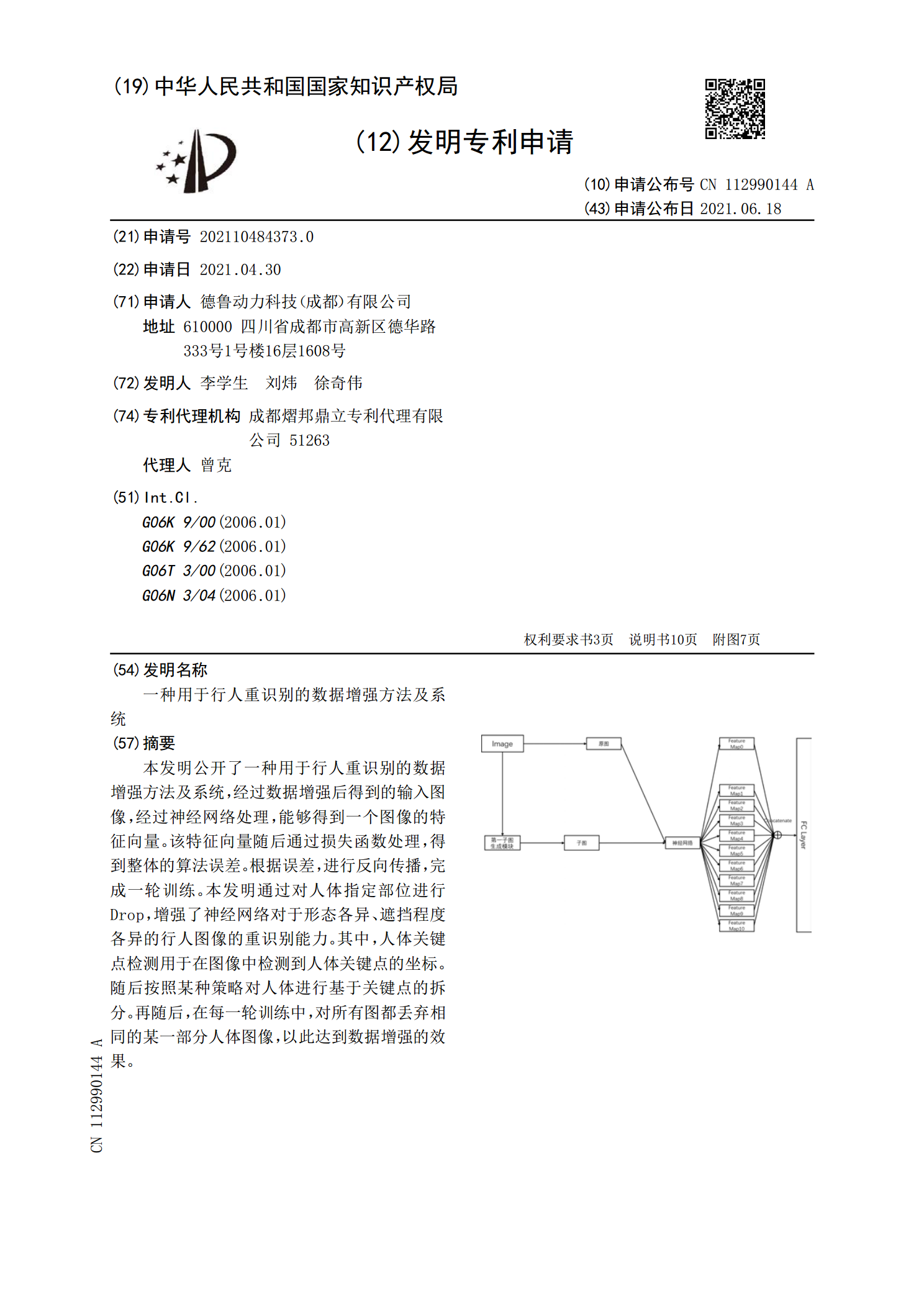
本发明公开了一种用于行人重识别的数据增强方法及系统,经过数据增强后得到的输入图像,经过神经网络处理,能够得到一个图像的特征向量。该特征向量随后通过损失函数处理,得到整体的算法误差。根据误差,进行反向传播,完成一轮训练。本发明通过对人体指定部位进行Drop,增强了神经网络对于形态各异、遮挡程度各异的行人图像的重识别能力。其中,人体关键点检测用于在图像中检测到人体关键点的坐标。随后按照某种策略对人体进行基于关键点的拆分。再随后,在每一轮训练中,对所有图都丢弃相同的某一部分人体图像,以此达到数据增强的效果。