
一种基于角锥阵列的激光探测系统.pdf

一吃****海逸

1/10
2/10

3/10
4/10
5/10
6/10

7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于角锥阵列的激光探测系统.pdf
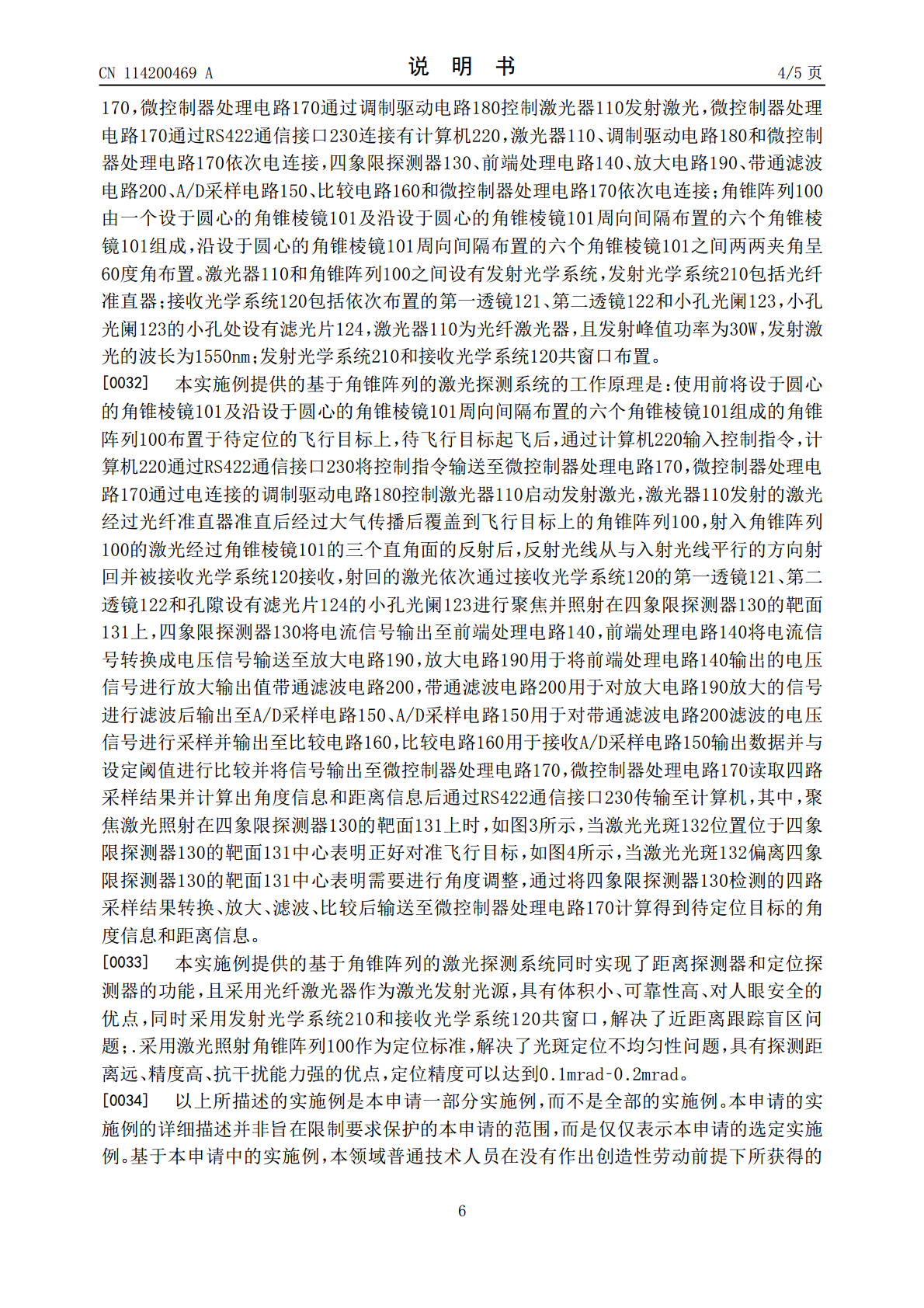
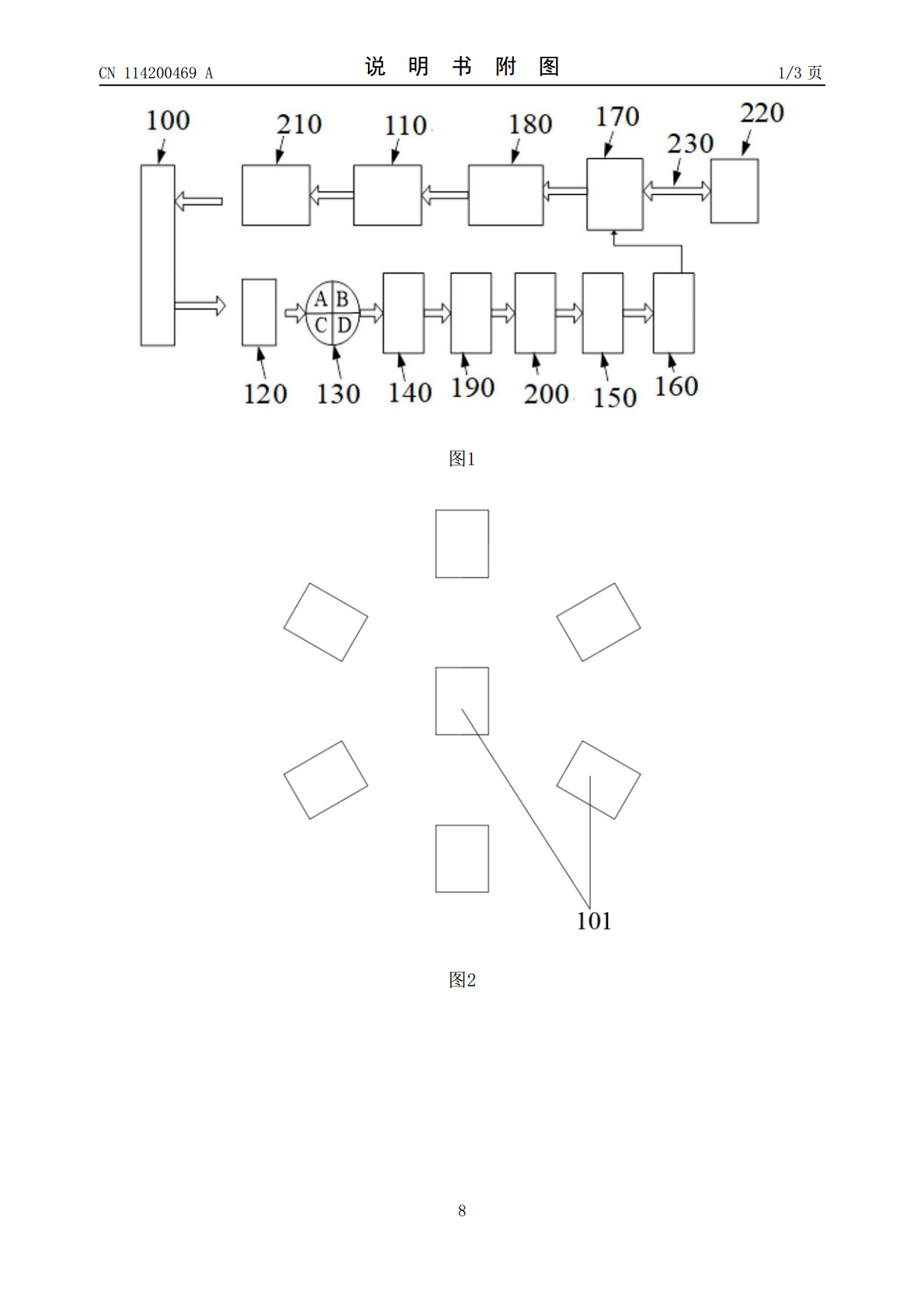
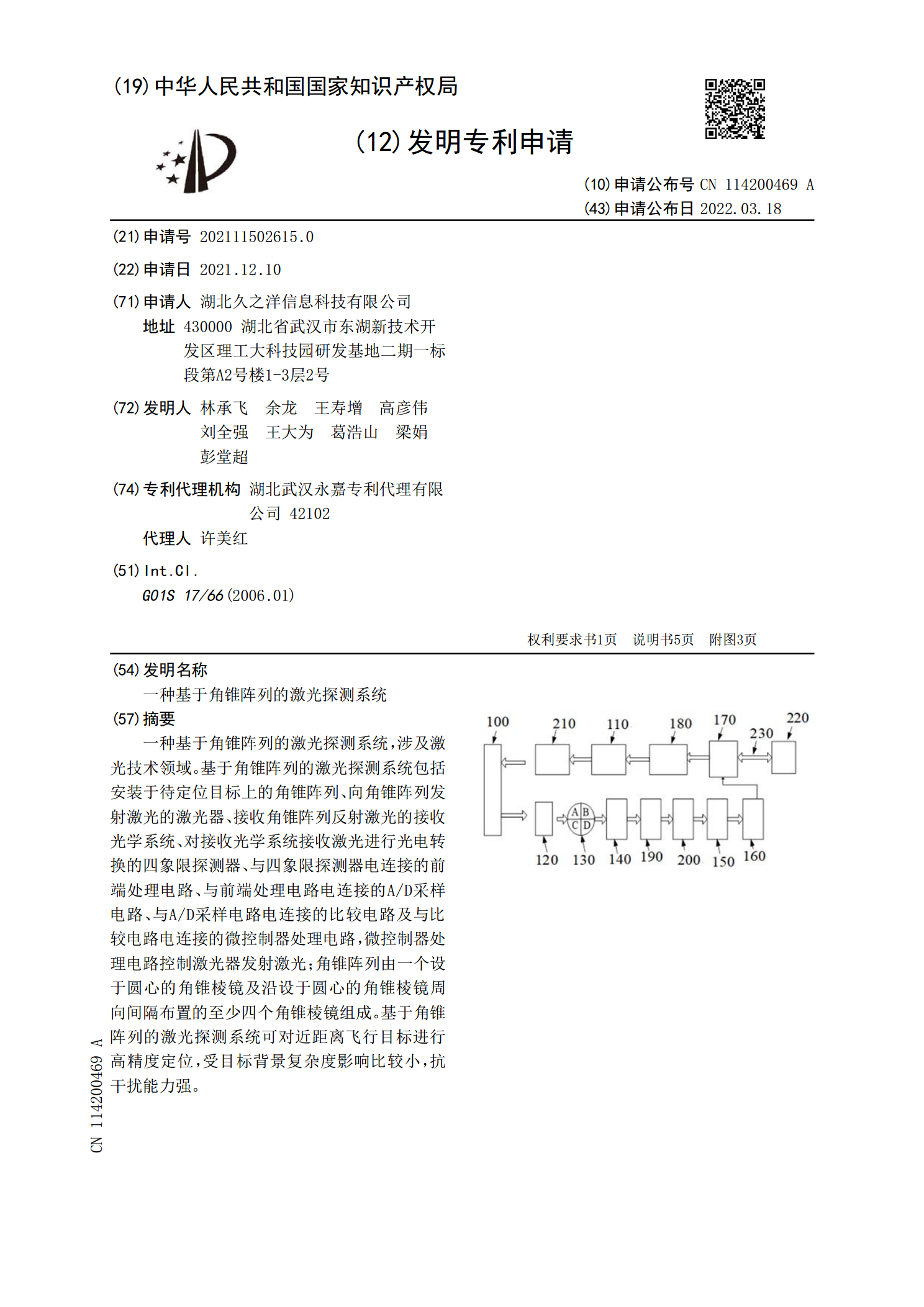
一种基于角锥阵列的激光探测系统,涉及激光技术领域。基于角锥阵列的激光探测系统包括安装于待定位目标上的角锥阵列、向角锥阵列发射激光的激光器、接收角锥阵列反射激光的接收光学系统、对接收光学系统接收激光进行光电转换的四象限探测器、与四象限探测器电连接的前端处理电路、与前端处理电路电连接的A/D采样电路、与A/D采样电路电连接的比较电路及与比较电路电连接的微控制器处理电路,微控制器处理电路控制激光器发射激光;角锥阵列由一个设于圆心的角锥棱镜及沿设于圆心的角锥棱镜周向间隔布置的至少四个角锥棱镜组成。基于角锥阵列的激

基于FBG阵列的滑动探测系统设计.docx
基于FBG阵列的滑动探测系统设计基于FBG阵列的滑动探测系统设计摘要:随着光纤传感技术的迅速发展,基于FBG(FiberBraggGrating)的传感系统在工业领域中得到了广泛的应用,其中包括滑动探测系统。本文旨在设计一种基于FBG阵列的滑动探测系统,通过研究FBG传感器的特性和原理,以及滑动探测系统的需求,设计出一种满足要求的系统方案,并进行实验验证。本文详细介绍了FBG传感器的原理、滑动探测系统的需求分析、系统设计方案以及实验结果分析。实验结果表明,设计的基于FBG阵列的滑动探测系统具有较高的精度和
一种基于复用稀疏阵列的微波主被动探测系统及方法.pdf
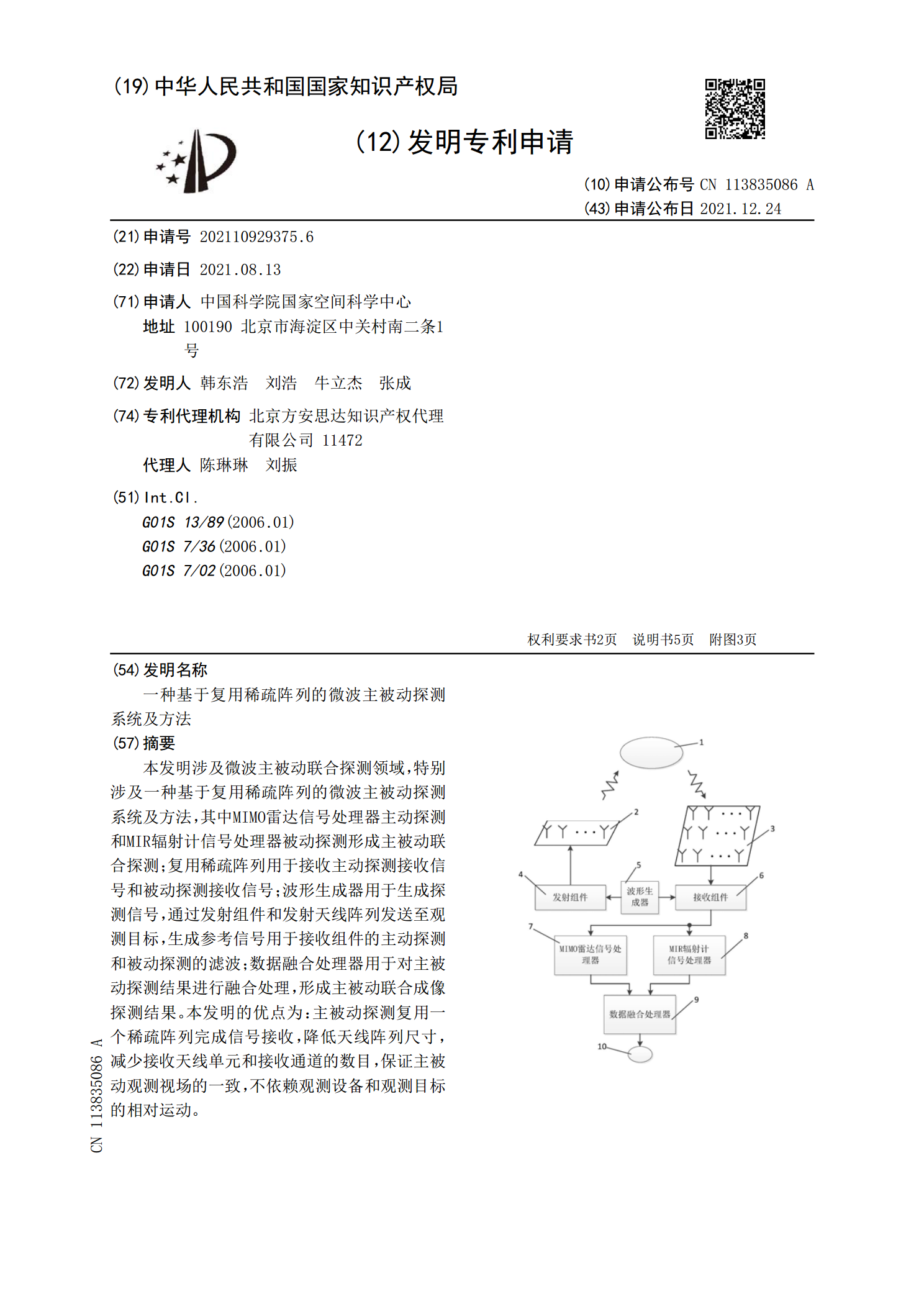
本发明涉及微波主被动联合探测领域,特别涉及一种基于复用稀疏阵列的微波主被动探测系统及方法,其中MIMO雷达信号处理器主动探测和MIR辐射计信号处理器被动探测形成主被动联合探测;复用稀疏阵列用于接收主动探测接收信号和被动探测接收信号;波形生成器用于生成探测信号,通过发射组件和发射天线阵列发送至观测目标,生成参考信号用于接收组件的主动探测和被动探测的滤波;数据融合处理器用于对主被动探测结果进行融合处理,形成主被动联合成像探测结果。本发明的优点为:主被动探测复用一个稀疏阵列完成信号接收,降低天线阵列尺寸,减少接
一种基于分割透镜的激光雷达装置及探测系统.pdf
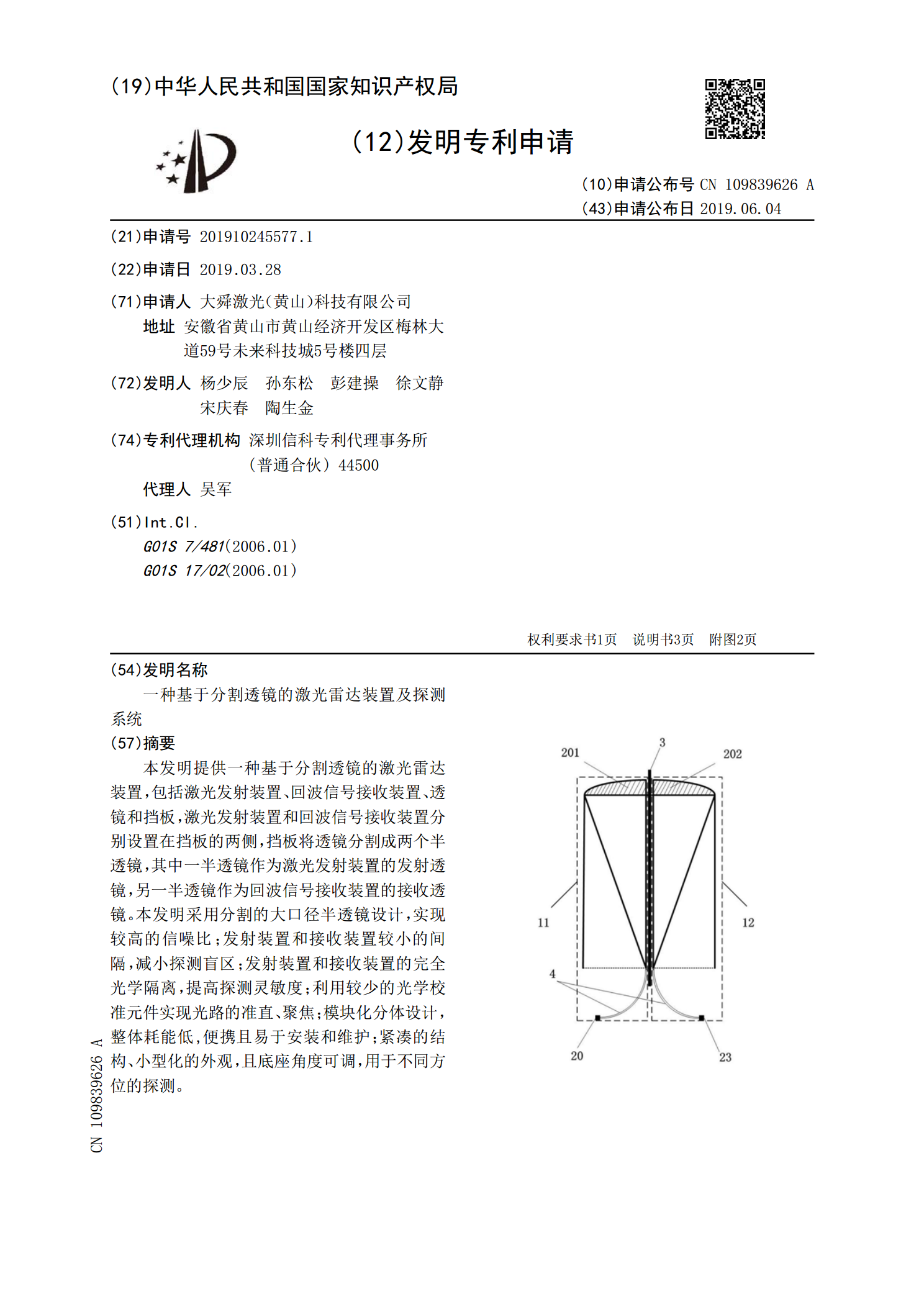
本发明提供一种基于分割透镜的激光雷达装置,包括激光发射装置、回波信号接收装置、透镜和挡板,激光发射装置和回波信号接收装置分别设置在挡板的两侧,挡板将透镜分割成两个半透镜,其中一半透镜作为激光发射装置的发射透镜,另一半透镜作为回波信号接收装置的接收透镜。本发明采用分割的大口径半透镜设计,实现较高的信噪比;发射装置和接收装置较小的间隔,减小探测盲区;发射装置和接收装置的完全光学隔离,提高探测灵敏度;利用较少的光学校准元件实现光路的准直、聚焦;模块化分体设计,整体耗能低,便携且易于安装和维护;紧凑的结构、小型化

基于ARM的激光探测系统研究与应用.docx
基于ARM的激光探测系统研究与应用基于ARM的激光探测系统研究与应用摘要:随着现代科技和工业的发展,激光技术在众多领域得到广泛应用,其中激光探测系统在环境监测、测距、成像等方面具有重要作用。然而,传统的激光探测系统存在体积庞大、功耗高、成本昂贵等问题,对于便携性、实时性和可靠性的要求无法满足。因此,本文基于ARM(AdvancedRISCMachine)架构,针对这些问题进行研究,通过开发基于ARM的激光探测系统,实现体积小、功耗低、成本较低和高性能的特点,以满足实际应用需求。Abstract:Witht