
一种MIMO雷达多目标测速扩展方法.pdf

努力****星驰

1/10
2/10

3/10
4/10
5/10
6/10

7/10
8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种MIMO雷达多目标测速扩展方法.pdf
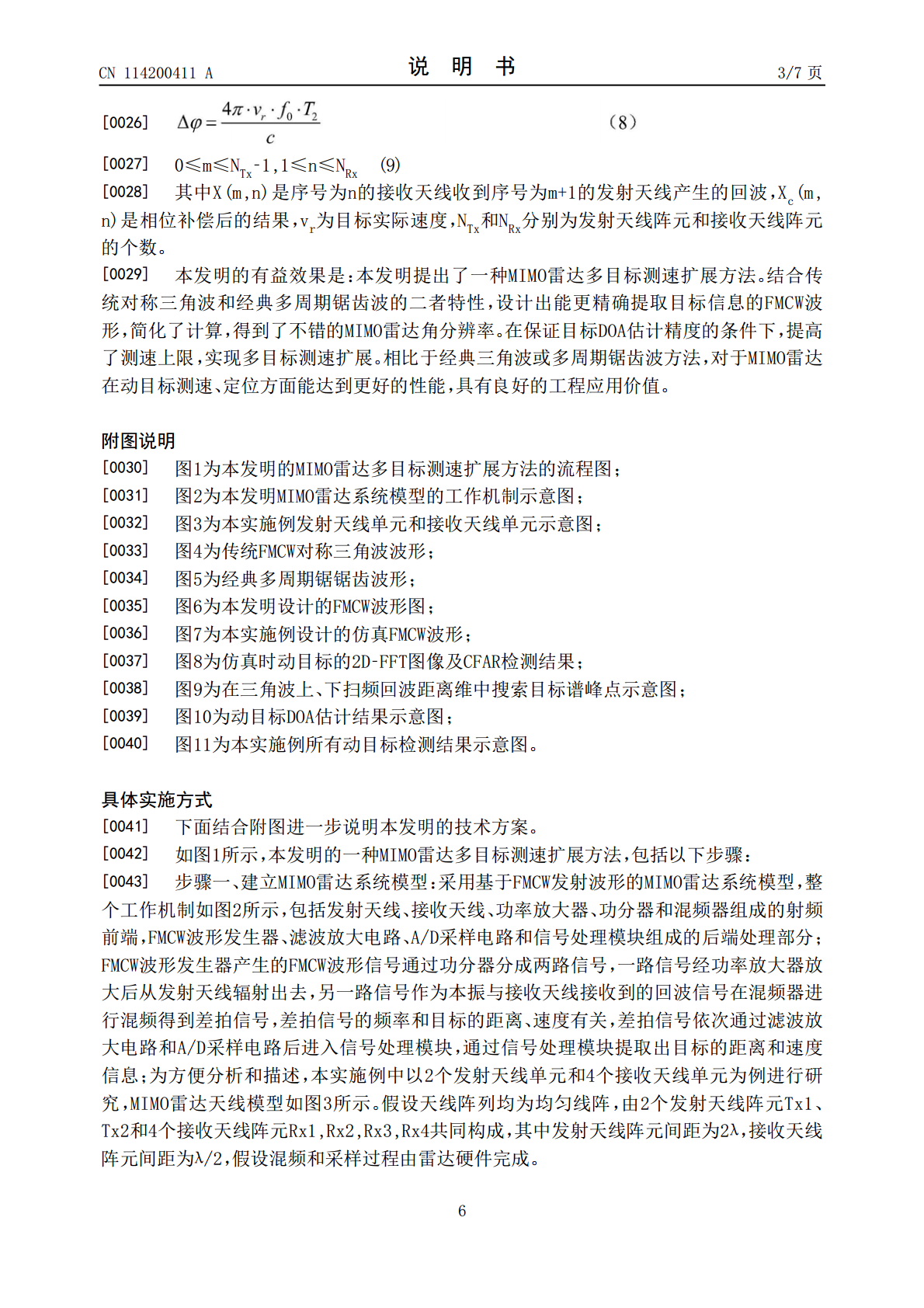
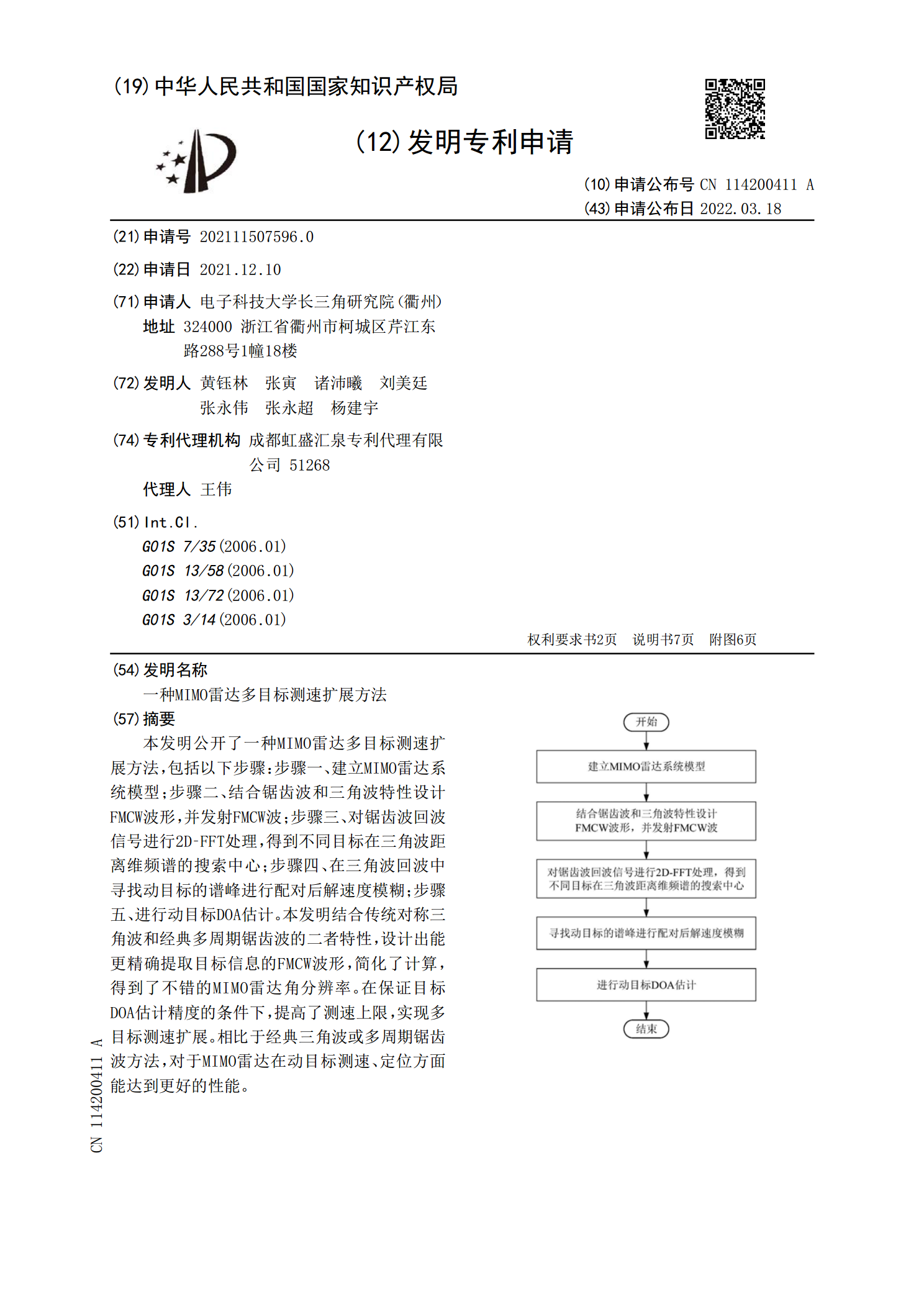
本发明公开了一种MIMO雷达多目标测速扩展方法,包括以下步骤:步骤一、建立MIMO雷达系统模型;步骤二、结合锯齿波和三角波特性设计FMCW波形,并发射FMCW波;步骤三、对锯齿波回波信号进行2D‑FFT处理,得到不同目标在三角波距离维频谱的搜索中心;步骤四、在三角波回波中寻找动目标的谱峰进行配对后解速度模糊;步骤五、进行动目标DOA估计。本发明结合传统对称三角波和经典多周期锯齿波的二者特性,设计出能更精确提取目标信息的FMCW波形,简化了计算,得到了不错的MIMO雷达角分辨率。在保证目标DOA估计精度的条

一种MIMO雷达扩展目标的检测方法.pdf
本发明一种MIMO雷达扩展目标的检测方法,目的在于利用MIMO雷达的多通道处理优势,使得复合高斯杂波中的扩展目标能够被更好地检测。本方法的核心思想是:根据MIMO雷达接收到的目标回波,进行目标运动参数和杂波参数的估计,然后利用GLRT基本原理,获得检验统计量,并最终完成检测。由于目标多普勒失配、复合高斯杂波形状参数等都会对GLRT的检测性能产生影响,首先采用最大似然估计(MLE)的方法,得到目标的多普勒及杂波形状参数的估计值,然后进行目标检测。最后,利用MIMO雷达多通道处理的优势,实现目标回波能量的累积
一种非线性FDA-MIMO雷达多普勒扩展补偿方法.pdf
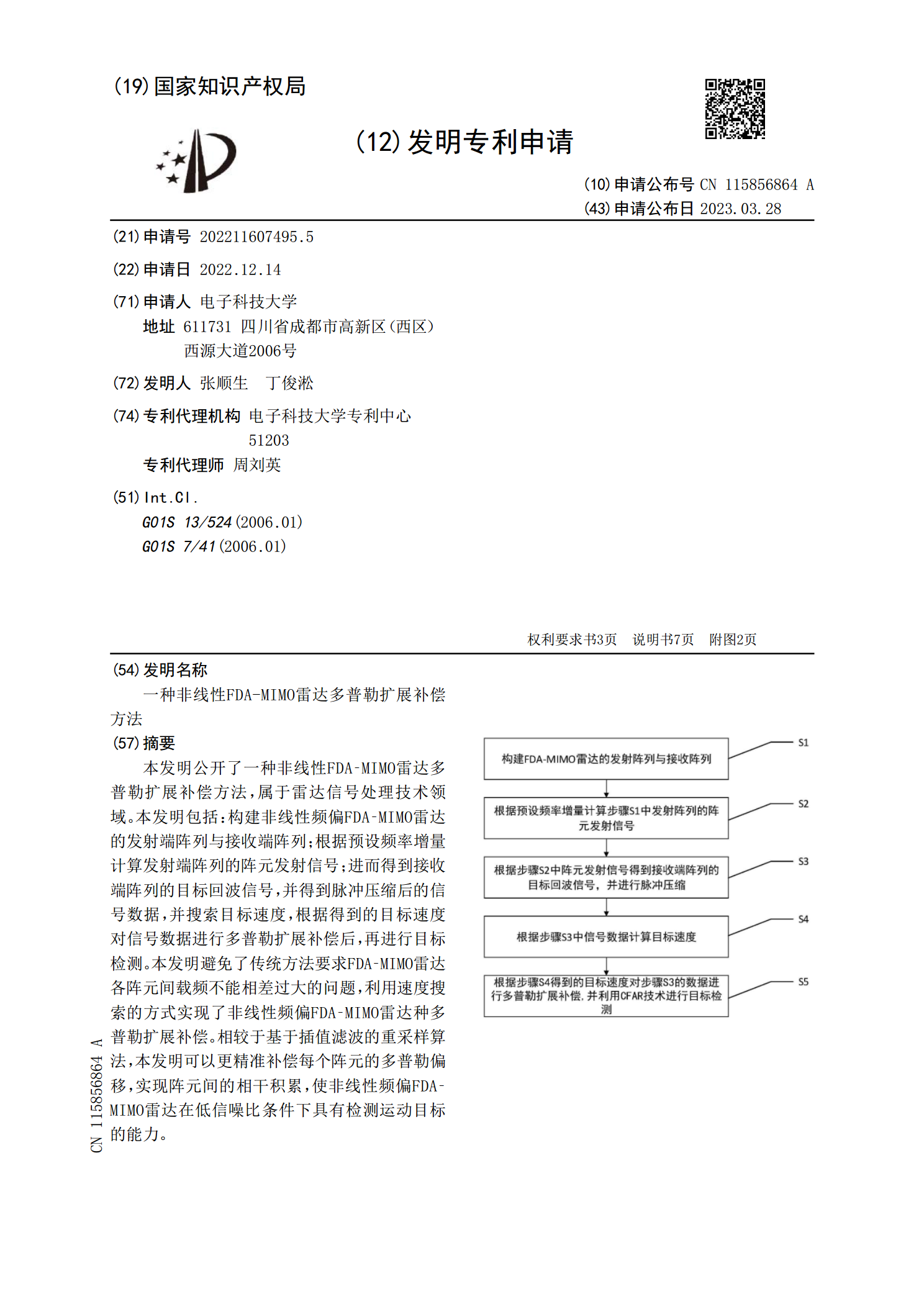
本发明公开了一种非线性FDA‑MIMO雷达多普勒扩展补偿方法,属于雷达信号处理技术领域。本发明包括:构建非线性频偏FDA‑MIMO雷达的发射端阵列与接收端阵列;根据预设频率增量计算发射端阵列的阵元发射信号;进而得到接收端阵列的目标回波信号,并得到脉冲压缩后的信号数据,并搜索目标速度,根据得到的目标速度对信号数据进行多普勒扩展补偿后,再进行目标检测。本发明避免了传统方法要求FDA‑MIMO雷达各阵元间载频不能相差过大的问题,利用速度搜索的方式实现了非线性频偏FDA‑MIMO雷达种多普勒扩展补偿。相较于基于插

一种双基地MIMO雷达高速目标跨距离门测速定位方法.pdf
本发明属于雷达信号处理技术领域,公开了一种双基地MIMO雷达高速目标跨距离门测速定位方法,包括如下步骤:获取L个基带回波脉冲信号;对L个基带回波脉冲信号进行脉冲压缩处理得到脉压输出信号,进而估计得到目标的发射方位角、发射俯仰角及接收俯仰角的粗估计值;利用目标的角度的粗估计值,确定目标跨越的距离单元数;利用目标所跨越的距离单元数,估计得到该目标的角度信息及多普勒频率;利用目标的角度信息确定目标的坐标信息,以及利用目标的多普勒频率确定该目标的速度。本发明能够在雷达目标存在距离走动情况下,精确估计雷达目标的角度

MIMO雷达多目标参数估计.docx
MIMO雷达多目标参数估计题目:MIMO雷达多目标参数估计摘要:MIMO雷达已经成为了当前雷达技术研究的核心方向之一,它具有精准定位、高分辨率、高功率利用率、多径抑制等优点。在雷达中,多目标参数估计是一个重要的问题,因为它可以帮助识别和跟踪多个目标。本文对MIMO雷达多目标参数估计的方法进行了综述。首先,介绍了MIMO雷达的基本原理和多目标雷达的分类。然后,分析了三种主要的多目标参数估计方法,即批处理方法、粒子群优化方法和卡尔曼滤波方法。最后,讨论了MIMO雷达多目标参数估计的应用前景和未来研究方向。关键