
一种磁屏蔽筒内轴向匀场线圈的设计方法.pdf

一只****iu


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种磁屏蔽筒内轴向匀场线圈的设计方法.pdf
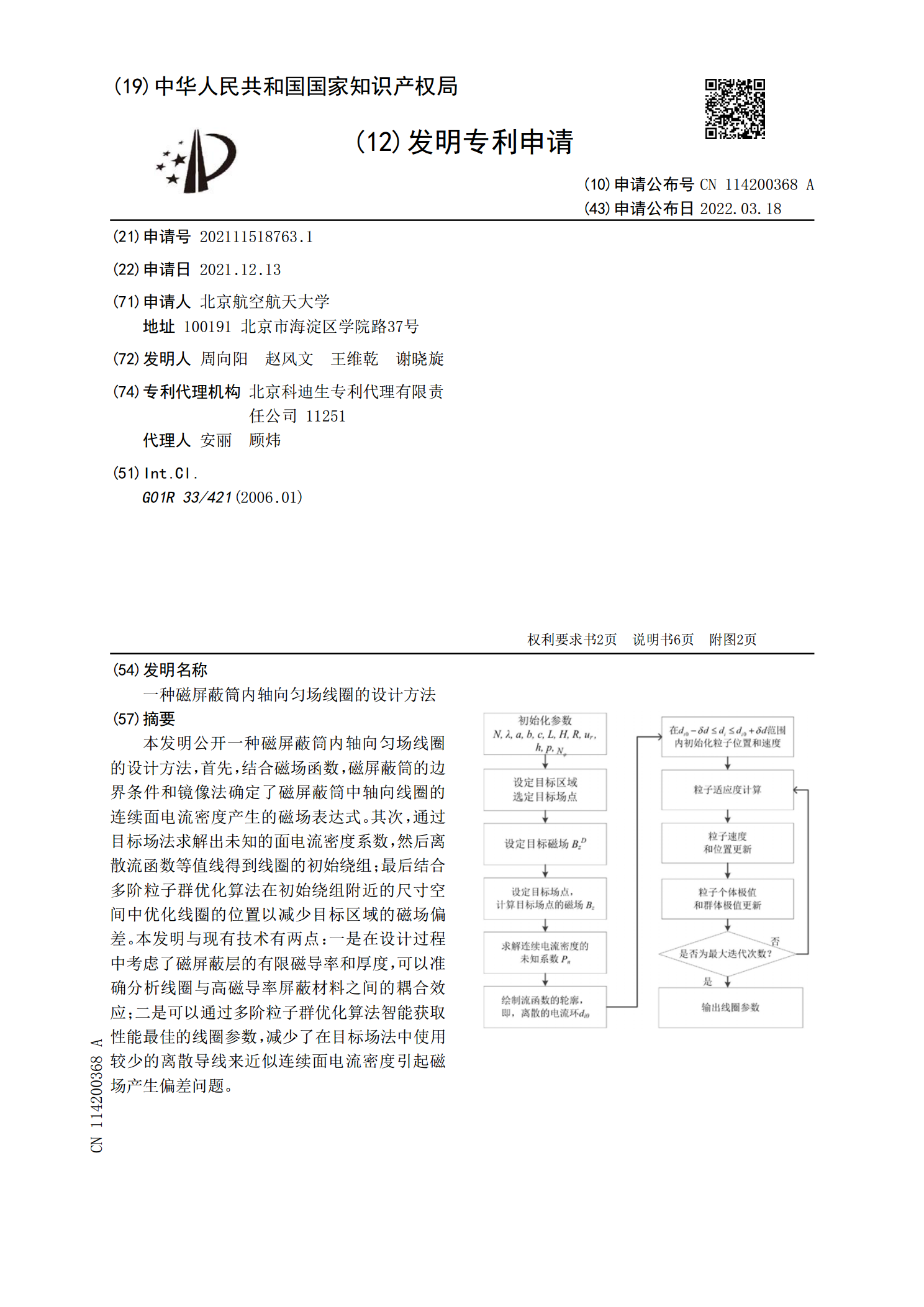
本发明公开一种磁屏蔽筒内轴向匀场线圈的设计方法,首先,结合磁场函数,磁屏蔽筒的边界条件和镜像法确定了磁屏蔽筒中轴向线圈的连续面电流密度产生的磁场表达式。其次,通过目标场法求解出未知的面电流密度系数,然后离散流函数等值线得到线圈的初始绕组;最后结合多阶粒子群优化算法在初始绕组附近的尺寸空间中优化线圈的位置以减少目标区域的磁场偏差。本发明与现有技术有两点:一是在设计过程中考虑了磁屏蔽层的有限磁导率和厚度,可以准确分析线圈与高磁导率屏蔽材料之间的耦合效应;二是可以通过多阶粒子群优化算法智能获取性能最佳的线圈参数

匀场线圈的设计与绕制.pptx
汇报人:CONTENTS添加章节标题匀场线圈设计匀场线圈的基本概念匀场线圈的设计原理匀场线圈的设计方法匀场线圈设计中的关键问题绕制工艺绕制前的准备绕制过程绕制后的处理绕制工艺的优化应用实例匀场线圈在电机中的应用匀场线圈在无线通信中的应用匀场线圈在医疗设备中的应用其他应用领域未来展望新型匀场线圈的研究方向绕制工艺的未来发展匀场线圈在新技术领域的应用前景对未来研究的建议和展望汇报人:

一种内屏蔽线圈的绕制方法.pdf
本发明公开了一种内屏蔽线圈的绕制方法,包括屏蔽线的下料步骤,去除屏蔽线端头的绝缘的步骤,屏蔽线端头的绝缘包扎步骤,绝缘纸板筒及线圈撑条的安装步骤,正段线匝的绕制步骤,反段线匝的绕制步骤,跨接换位制作步骤。本发明的绕制方法,采用反段、正段交替绕制的方法,屏蔽线跨段绕制,首先计算预留屏蔽线的长度,按计算的长度留出屏蔽线,在完成反段绕制后,将预留屏蔽线通过内部换位过渡到正段,在反段与正段的绕制过程中,不用焊接屏蔽线接头,保证了变压器线圈的质量,还降低了制造成本。
一种基于磁屏蔽房铁磁边界耦合的双平面线圈设计方法.pdf
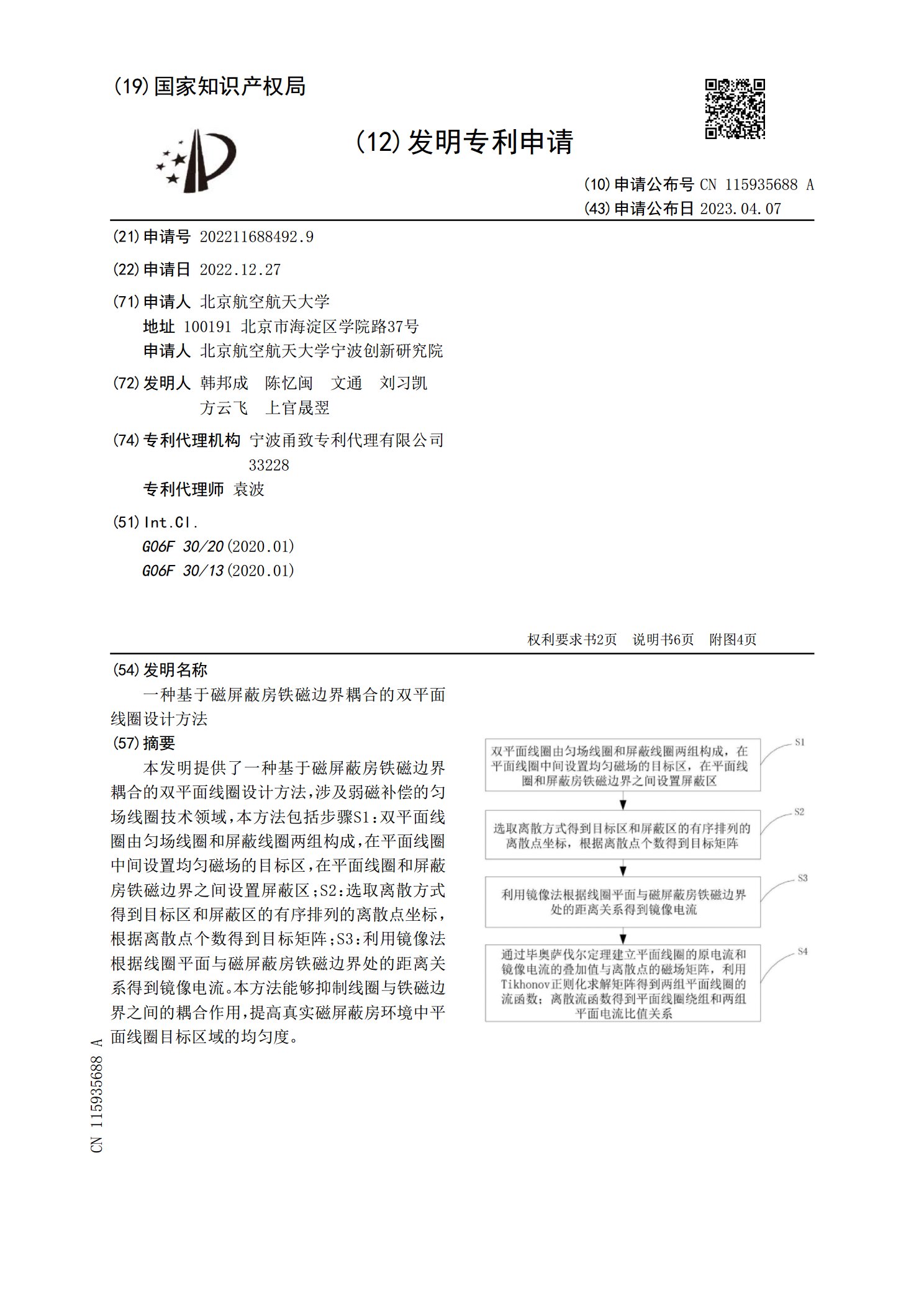
本发明提供了一种基于磁屏蔽房铁磁边界耦合的双平面线圈设计方法,涉及弱磁补偿的匀场线圈技术领域,本方法包括步骤S1:双平面线圈由匀场线圈和屏蔽线圈两组构成,在平面线圈中间设置均匀磁场的目标区,在平面线圈和屏蔽房铁磁边界之间设置屏蔽区;S2:选取离散方式得到目标区和屏蔽区的有序排列的离散点坐标,根据离散点个数得到目标矩阵;S3:利用镜像法根据线圈平面与磁屏蔽房铁磁边界处的距离关系得到镜像电流。本方法能够抑制线圈与铁磁边界之间的耦合作用,提高真实磁屏蔽房环境中平面线圈目标区域的均匀度。

罗氏线圈磁屏蔽盒的设计与研究.docx
罗氏线圈磁屏蔽盒的设计与研究罗氏线圈磁屏蔽盒的设计与研究摘要:罗氏线圈是一种常用的磁场发生器,但其高强度磁场对周围的电子设备和电路造成干扰。为了解决这一问题,研究者设计并研究了罗氏线圈磁屏蔽盒。本文通过对罗氏线圈的工作原理和磁场特性的分析,探讨了罗氏线圈磁屏蔽盒的设计原则和方法,并研究了不同屏蔽材料和结构的性能。实验结果表明,罗氏线圈磁屏蔽盒能够有效降低磁场干扰,提高设备性能和稳定性。关键词:罗氏线圈;磁场干扰;磁屏蔽盒;屏蔽材料;设备性能1.引言罗氏线圈是一种基本的磁场发生器,广泛应用于物理实验、医学影