
一种基于注意力机制的动态时空无人机充电方法.pdf

阳炎****找我


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于注意力机制的动态时空无人机充电方法.pdf
本发明公开了一种基于注意力机制的动态时空无人机充电方法,包括如下步骤,获得无线传感器节点集群的电量和位置信息;获得充电无人机当前的信息建立能耗模型;预估当前充电任务周期内被充电节点的数量;将传感器节点划分为待充电集合与备选集合;计算传感范围内待充电聚类的重要性程度;计算无人机对待充电目标的空间悬停位置。本发明充分考虑传感器节点和无人机的实时电量以及无线充电效率,通过聚类算法和基于注意力机制的在线路径规划算法使无人机能够对关键目标进行充电,节省了无人机和充电和飞行能耗,在与不同算法进行对比后,证明了本方法所

基于注意力机制的动态时空感知网络.docx
基于注意力机制的动态时空感知网络1.内容概要简称DSTN)。该网络模型是一种针对视频分析任务的深度学习模型,通过结合时空信息和注意力机制,能够有效地捕捉视频中的关键帧和关键区域,从而提高视频分类、目标检测和跟踪等任务的性能。DSTN主要由三个部分组成:编码器、解码器和注意力模块。编码器负责将输入的视频序列进行特征提取,解码器则根据编码器的输出生成目标序列。注意力模块则用于在编码器和解码器之间建立注意力权重,以便更好地关注视频中的关键帧和关键区域。在实现过程中,我们采用了卷积神经网络(Convolution
一种基于时空注意力的城市时空预测方法.pdf
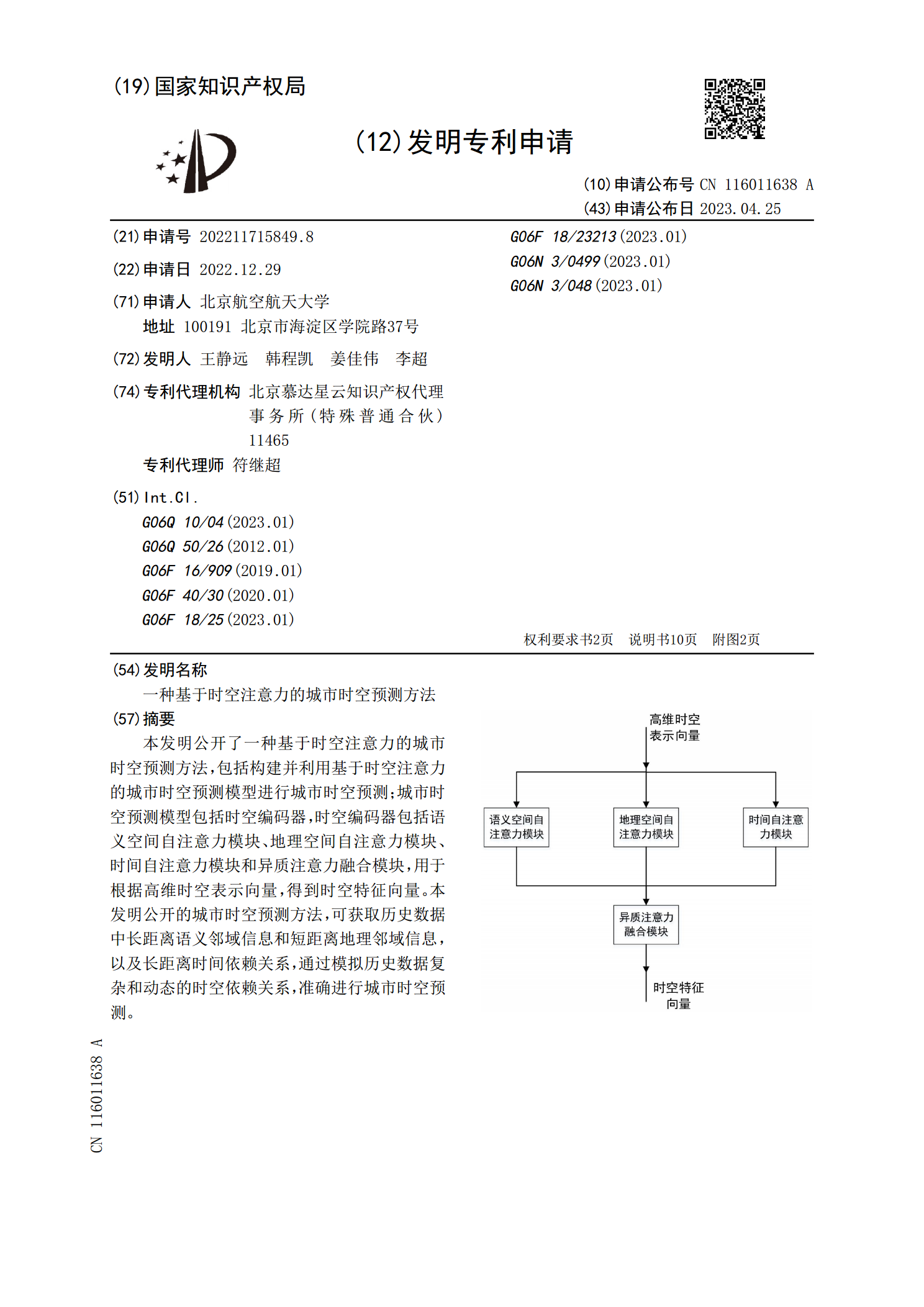
本发明公开了一种基于时空注意力的城市时空预测方法,包括构建并利用基于时空注意力的城市时空预测模型进行城市时空预测;城市时空预测模型包括时空编码器,时空编码器包括语义空间自注意力模块、地理空间自注意力模块、时间自注意力模块和异质注意力融合模块,用于根据高维时空表示向量,得到时空特征向量。本发明公开的城市时空预测方法,可获取历史数据中长距离语义邻域信息和短距离地理邻域信息,以及长距离时间依赖关系,通过模拟历史数据复杂和动态的时空依赖关系,准确进行城市时空预测。

基于动态表示的注意力机制序列推荐方法研究.docx
基于动态表示的注意力机制序列推荐方法研究基于动态表示的注意力机制序列推荐方法研究摘要:在互联网时代,推荐系统已成为了各大电商平台、社交媒体和新闻网站等用户个性化体验的重要组成部分。序列推荐是推荐系统中的一个重要研究方向,它考虑了用户行为的时序特征。本文提出了一种基于动态表示的注意力机制序列推荐方法,通过利用深度学习模型中的注意力机制和时间序列数据,实现对用户行为的建模和推荐结果的优化。实验证明,该方法能够显著提升推荐系统的准确性和个性化程度。关键词:推荐系统,注意力机制,动态表示,序列推荐,深度学习引言:
一种基于注意力机制时空位置编码的脑电情感识别方法.pdf
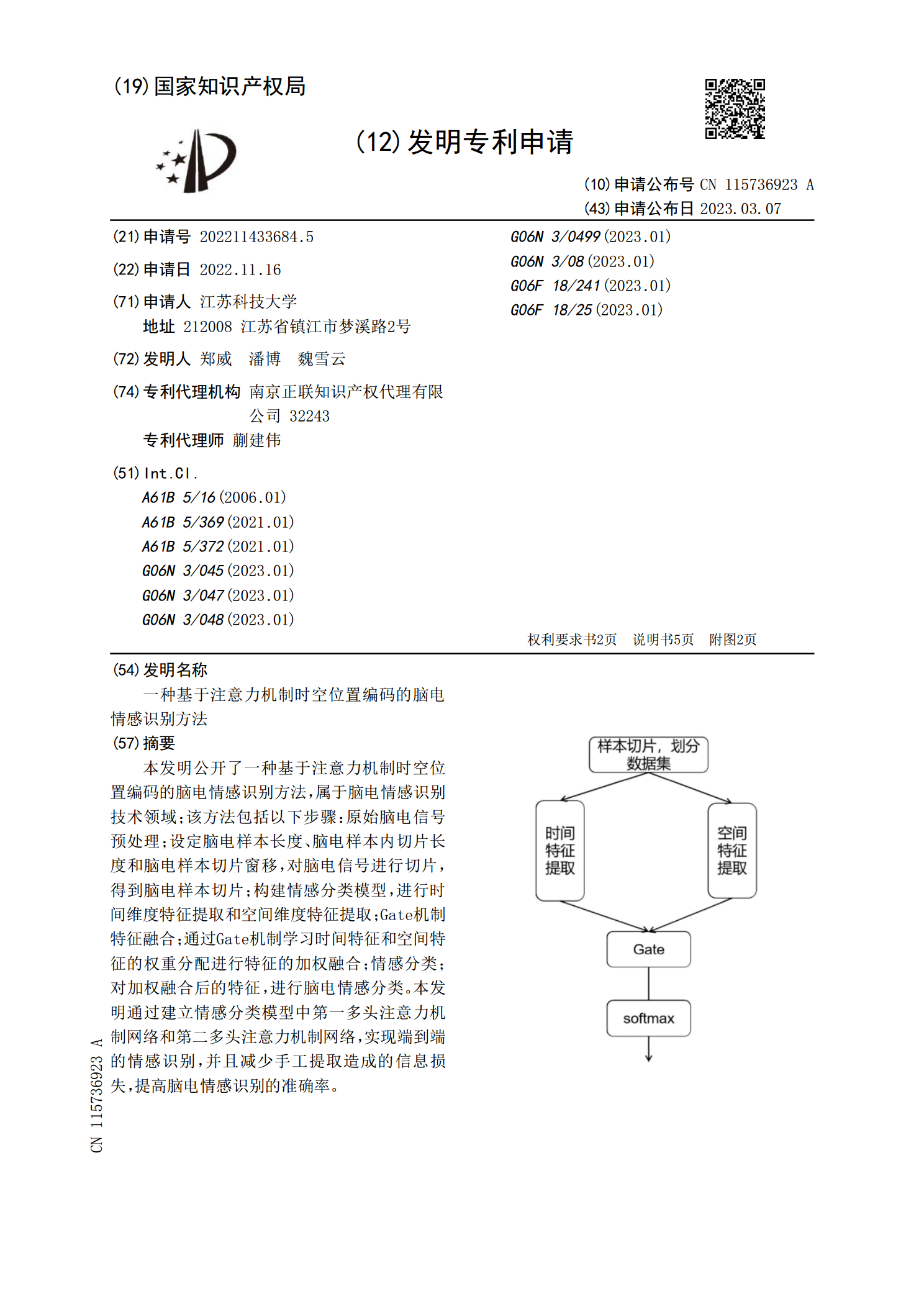
本发明公开了一种基于注意力机制时空位置编码的脑电情感识别方法,属于脑电情感识别技术领域;该方法包括以下步骤:原始脑电信号预处理;设定脑电样本长度、脑电样本内切片长度和脑电样本切片窗移,对脑电信号进行切片,得到脑电样本切片;构建情感分类模型,进行时间维度特征提取和空间维度特征提取;Gate机制特征融合;通过Gate机制学习时间特征和空间特征的权重分配进行特征的加权融合;情感分类;对加权融合后的特征,进行脑电情感分类。本发明通过建立情感分类模型中第一多头注意力机制网络和第二多头注意力机制网络,实现端到端的情感