
一种基于动态目标的相控阵雷达幅相校准方法及系统.pdf

宜欣****外呢

1/10
2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于动态目标的相控阵雷达幅相校准方法及系统.pdf
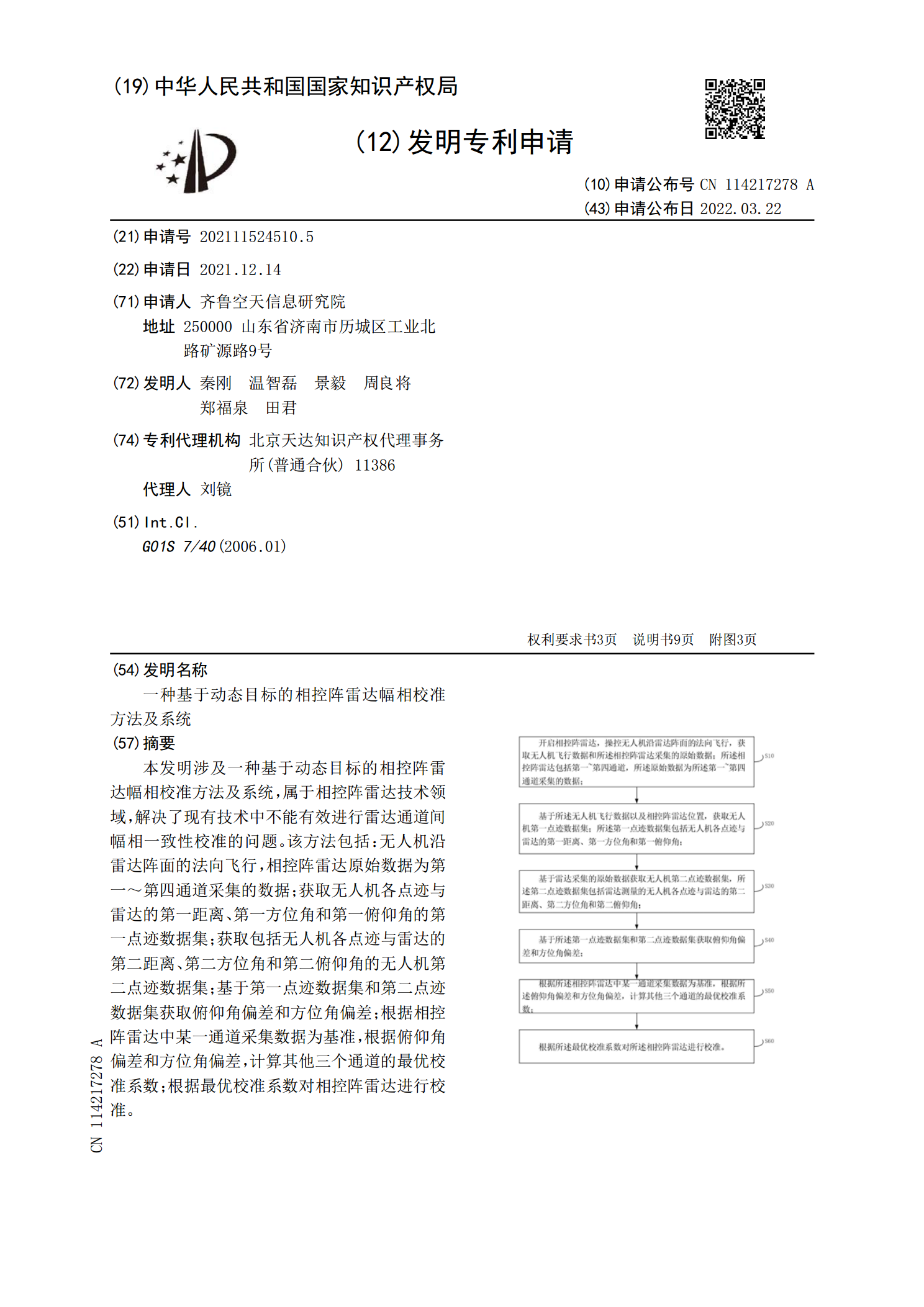
本发明涉及一种基于动态目标的相控阵雷达幅相校准方法及系统,属于相控阵雷达技术领域,解决了现有技术中不能有效进行雷达通道间幅相一致性校准的问题。该方法包括:无人机沿雷达阵面的法向飞行,相控阵雷达原始数据为第一~第四通道采集的数据;获取无人机各点迹与雷达的第一距离、第一方位角和第一俯仰角的第一点迹数据集;获取包括无人机各点迹与雷达的第二距离、第二方位角和第二俯仰角的无人机第二点迹数据集;基于第一点迹数据集和第二点迹数据集获取俯仰角偏差和方位角偏差;根据相控阵雷达中某一通道采集数据为基准,根据俯仰角偏差和方位角

一种二次雷达相控阵系统的自动校准方法.docx
一种二次雷达相控阵系统的自动校准方法引言随着雷达技术的不断发展,相控阵雷达成为目前高性能雷达接收机的主流。相较于传统雷达,相控阵雷达系统具有跨立体角探测、能动扫描和多波束探测等优势。但是,在实际应用中,相控阵雷达的系统误差会对性能带来较大影响。因此,针对系统误差进行自动校准,提高相控阵雷达的实际应用性能就显得尤为重要。本文旨在探究一种基于二次雷达的相控阵系统的自动校准方法,并对该方法进行实验验证。二次雷达相控阵系统二次雷达相控阵系统是一种基于二次雷达原理开发的相控阵系统。其采用双基线方式实现二次波形整合,
幅相测试方法及设备、电磁信号收发系统、幅相校准方法.pdf
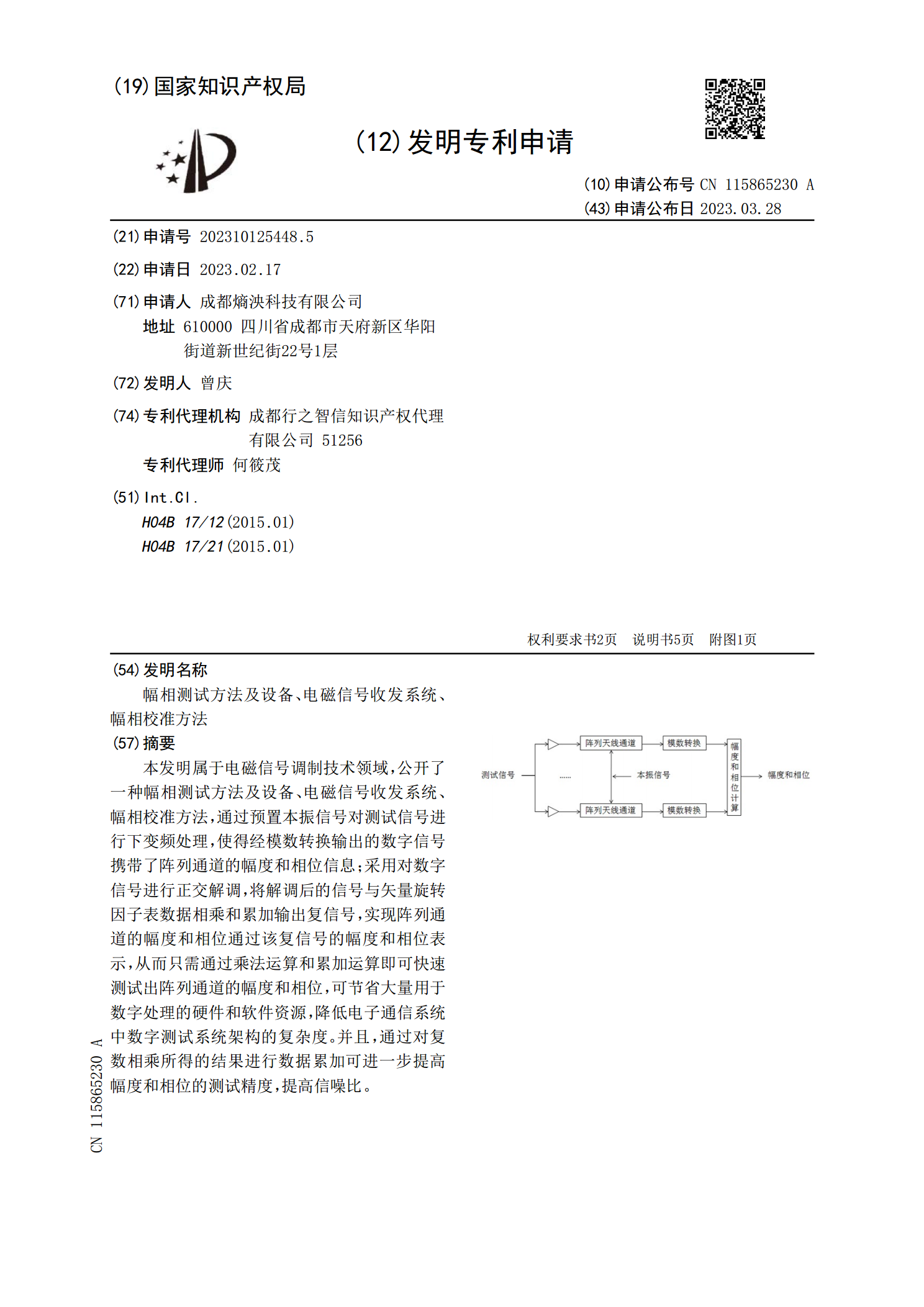
本发明属于电磁信号调制技术领域,公开了一种幅相测试方法及设备、电磁信号收发系统、幅相校准方法,通过预置本振信号对测试信号进行下变频处理,使得经模数转换输出的数字信号携带了阵列通道的幅度和相位信息;采用对数字信号进行正交解调,将解调后的信号与矢量旋转因子表数据相乘和累加输出复信号,实现阵列通道的幅度和相位通过该复信号的幅度和相位表示,从而只需通过乘法运算和累加运算即可快速测试出阵列通道的幅度和相位,可节省大量用于数字处理的硬件和软件资源,降低电子通信系统中数字测试系统架构的复杂度。并且,通过对复数相乘所得的

基于相位交织的相控阵雷达通道幅相误差在线监测和校正方法.docx
基于相位交织的相控阵雷达通道幅相误差在线监测和校正方法一、引言相控阵雷达是目前应用广泛的雷达技术之一,它具有高分辨率、抗干扰、指向性强等特点,适用于航空、海洋、导弹等多个领域。然而,在复杂的电磁环境下,相控阵雷达通道之间的传输误差会导致产生幅相误差,从而影响雷达性能。因此,相控阵雷达通道幅相误差的在线监测和校正是保障雷达性能的重要手段。本文主要讨论基于相位交织技术实现相控阵雷达通道幅相误差在线监测和校正的方法,并通过实验验证其有效性。二、相位交织技术原理相位交织是一种通道校正技术,它利用相位推迟和旋转的方

一种基于脉间积累的相控阵雷达接收通道校准测试方法.pdf
本发明涉及一种基于脉间积累的相控阵雷达接收通道校准测试方法,属于一维有源相控阵雷达天线校准领域。通过雷达天线和测试天线同时旋转,使得干扰信号到达雷达天线阵面的路径不断改变,通过长时间积累,使得干扰信号具有多普勒频率,利用测试天线和雷达天线相对位置固定,经过长时间积累测试信号没有多普勒频率,利用多普勒原理滤除具有多普勒频移的干扰信号,解决了存在干扰信号下的接收通道校准。此方法可以有效解决干扰情况下的接收通道校准,因此对天线测试使用场地的需求不再严苛。