
一种钢筋网片吊装控制系统.pdf

书生****文章

1/10

2/10
3/10

4/10

5/10
6/10
7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种钢筋网片吊装控制系统.pdf
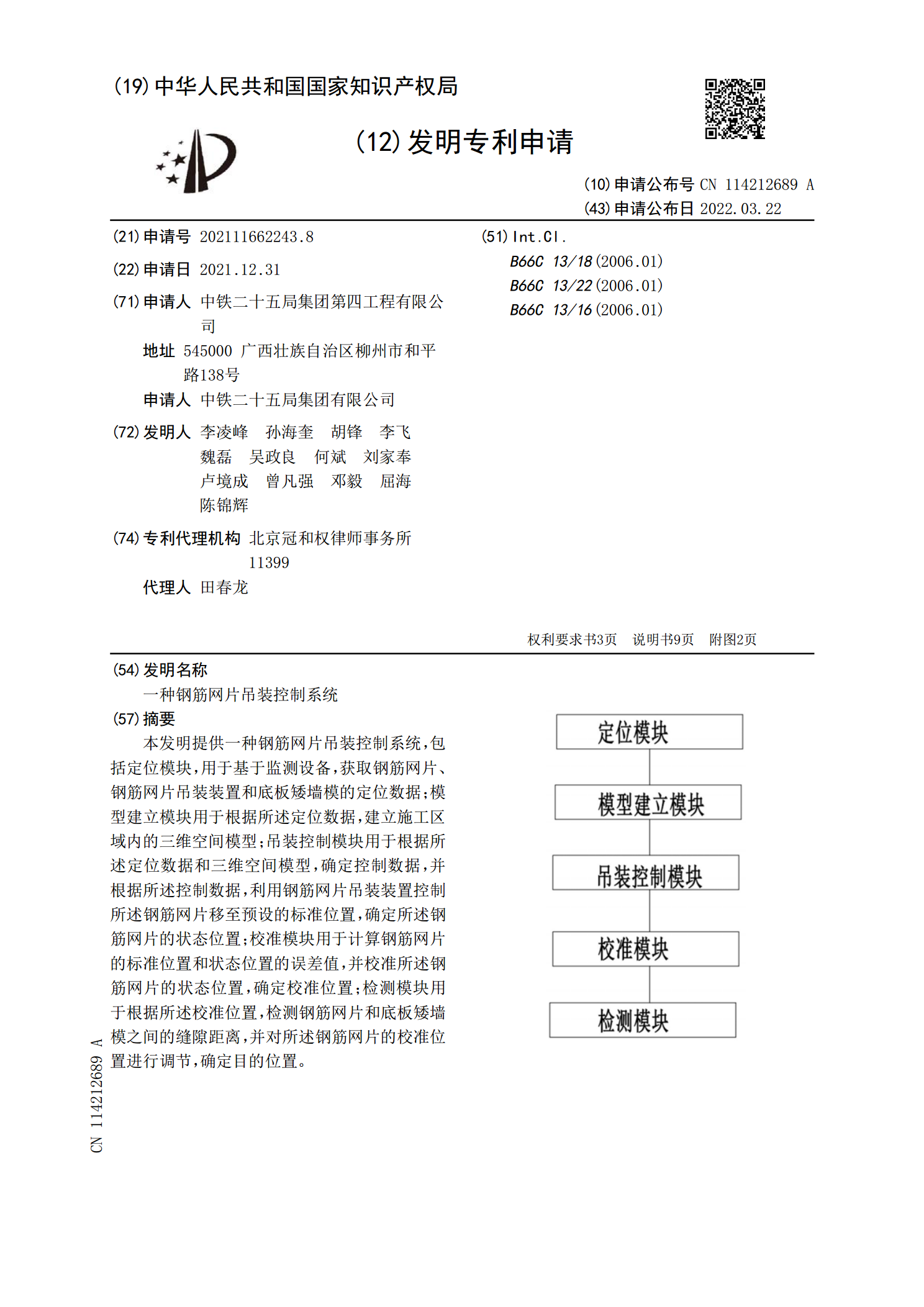
本发明提供一种钢筋网片吊装控制系统,包括定位模块,用于基于监测设备,获取钢筋网片、钢筋网片吊装装置和底板矮墙模的定位数据;模型建立模块用于根据所述定位数据,建立施工区域内的三维空间模型;吊装控制模块用于根据所述定位数据和三维空间模型,确定控制数据,并根据所述控制数据,利用钢筋网片吊装装置控制所述钢筋网片移至预设的标准位置,确定所述钢筋网片的状态位置;校准模块用于计算钢筋网片的标准位置和状态位置的误差值,并校准所述钢筋网片的状态位置,确定校准位置;检测模块用于根据所述校准位置,检测钢筋网片和底板矮墙模之间的

一种钢筋网片吊装移动安装机构.pdf
本发明提供一种钢筋网片吊装移动安装机构,包括:横梁、移动支架以及升降框;所述横梁长度方向平行于水平面,所述移动支架延所述横梁长度方向滑动连接于所述横梁,所述升降框延竖直方向滑动连接于所述移动支架,所述横梁安装有驱动所述移动支架滑动的第一驱动机构,所述移动支架安装有驱动所述升降框滑动的第二驱动机构。本发明的目的在于提供一种钢筋网片的移动和安装效率高的安装机构。
一种钢筋网片吊装周转支架及周转方法.pdf
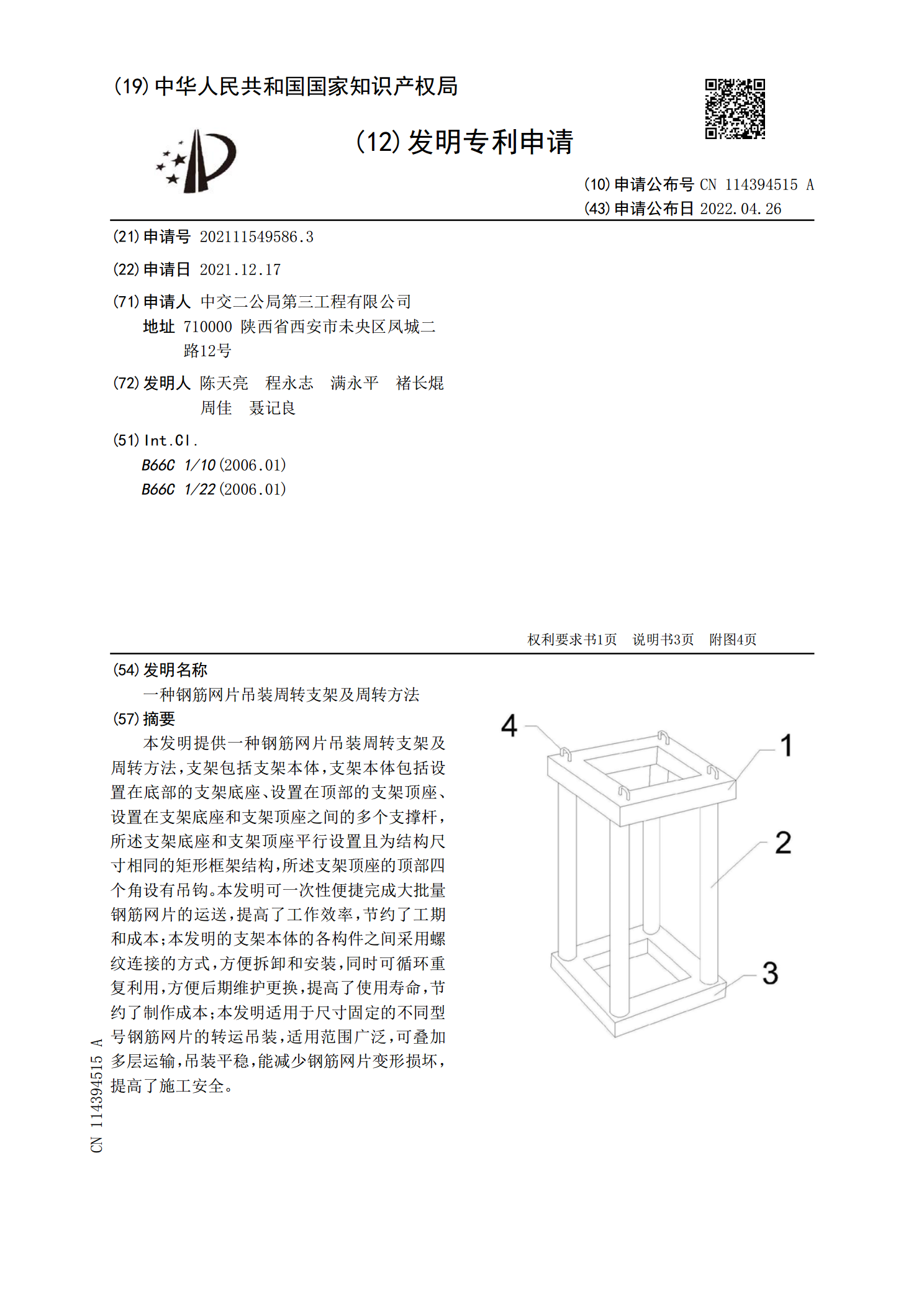
本发明提供一种钢筋网片吊装周转支架及周转方法,支架包括支架本体,支架本体包括设置在底部的支架底座、设置在顶部的支架顶座、设置在支架底座和支架顶座之间的多个支撑杆,所述支架底座和支架顶座平行设置且为结构尺寸相同的矩形框架结构,所述支架顶座的顶部四个角设有吊钩。本发明可一次性便捷完成大批量钢筋网片的运送,提高了工作效率,节约了工期和成本;本发明的支架本体的各构件之间采用螺纹连接的方式,方便拆卸和安装,同时可循环重复利用,方便后期维护更换,提高了使用寿命,节约了制作成本;本发明适用于尺寸固定的不同型号钢筋网片的
一种钢筋网片吊具.pdf
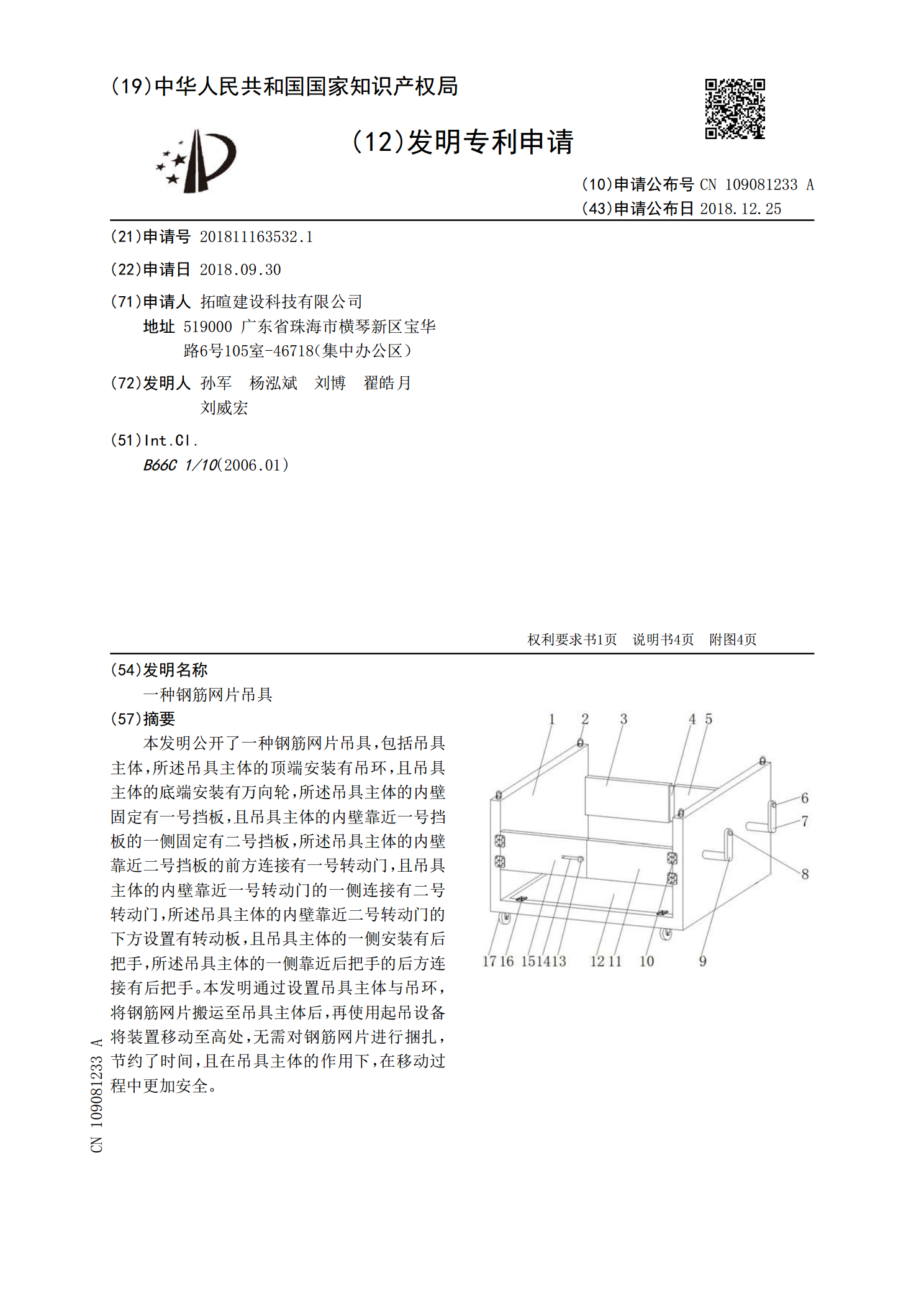
本发明公开了一种钢筋网片吊具,包括吊具主体,所述吊具主体的顶端安装有吊环,且吊具主体的底端安装有万向轮,所述吊具主体的内壁固定有一号挡板,且吊具主体的内壁靠近一号挡板的一侧固定有二号挡板,所述吊具主体的内壁靠近二号挡板的前方连接有一号转动门,且吊具主体的内壁靠近一号转动门的一侧连接有二号转动门,所述吊具主体的内壁靠近二号转动门的下方设置有转动板,且吊具主体的一侧安装有后把手,所述吊具主体的一侧靠近后把手的后方连接有后把手。本发明通过设置吊具主体与吊环,将钢筋网片搬运至吊具主体后,再使用起吊设备将装置移动至

一种用于钢筋网片穿插的钢筋折弯机.pdf
本发明公开了一种用于钢筋网片穿插的钢筋折弯机,包括机架,机架上固定安装有抓取机构、斜插夹持机构和折弯机构,抓取机构与斜插夹持机构之间的角度为45°,抓取机构与折弯机构之间的角度为90°。抓取机构可利用框架式电磁铁夹紧钢筋,并通过自身移动将钢筋拉动至预设位置;斜插夹持机构具有较大的刚度,可沿45°方向伸入钢筋网片中,使钢筋进入夹槽内,保证钢筋折弯过程中本体部分不随钢筋弯折而转动;折弯机构可垂直于钢筋插入方向运动,利用第四驱动电机及齿轮将钢筋折弯。本发明可以自动抓取,拖动钢筋,保证钢筋已折弯一端的弯头紧贴钢筋