
一种基于遥感影像的云及云阴影检测方法和装置.pdf

绮兰****文章

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于遥感影像的云及云阴影检测方法和装置.pdf
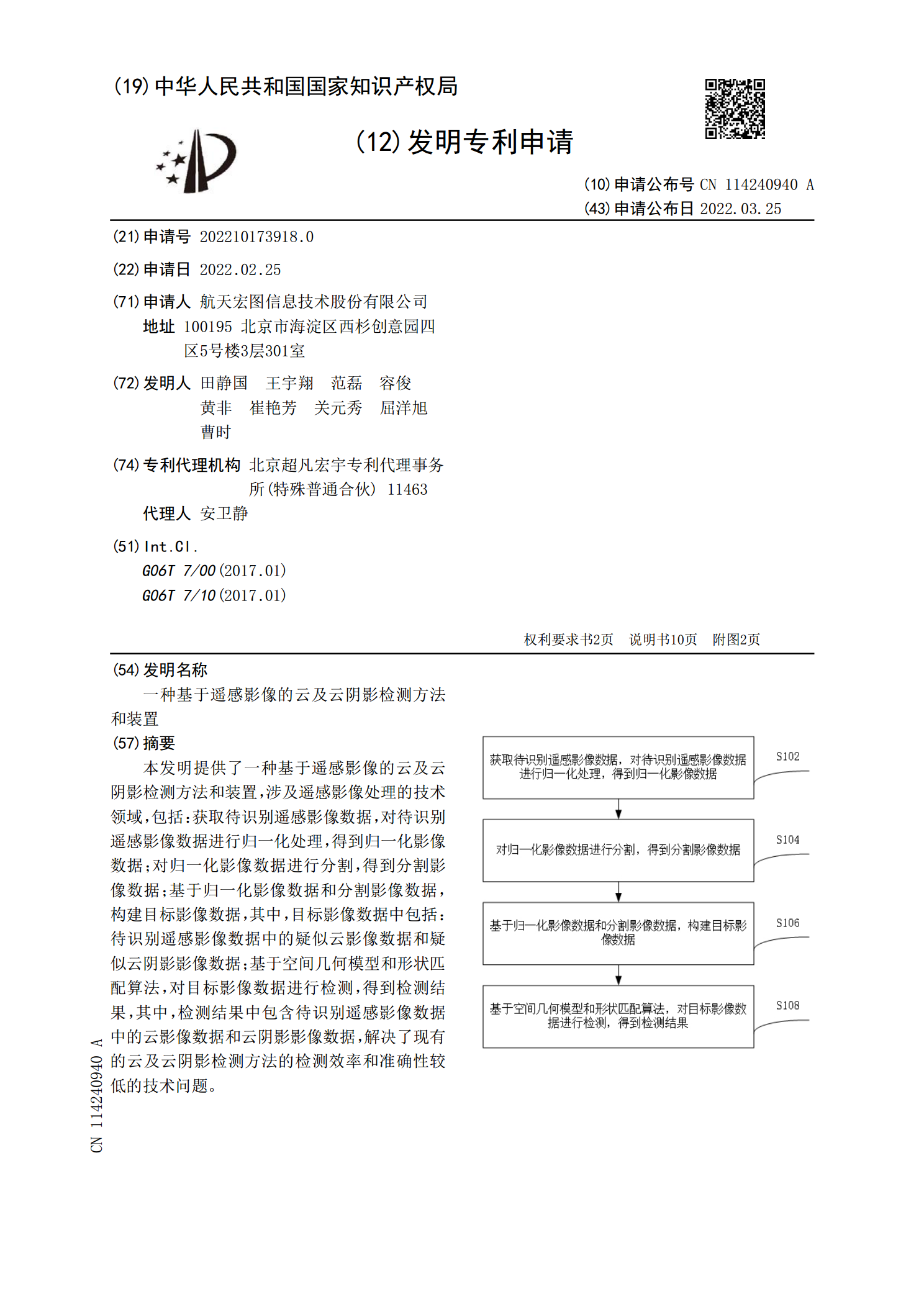
本发明提供了一种基于遥感影像的云及云阴影检测方法和装置,涉及遥感影像处理的技术领域,包括:获取待识别遥感影像数据,对待识别遥感影像数据进行归一化处理,得到归一化影像数据;对归一化影像数据进行分割,得到分割影像数据;基于归一化影像数据和分割影像数据,构建目标影像数据,其中,目标影像数据中包括:待识别遥感影像数据中的疑似云影像数据和疑似云阴影影像数据;基于空间几何模型和形状匹配算法,对目标影像数据进行检测,得到检测结果,其中,检测结果中包含待识别遥感影像数据中的云影像数据和云阴影影像数据,解决了现有的云及云阴
光学遥感影像云检测方法.pdf
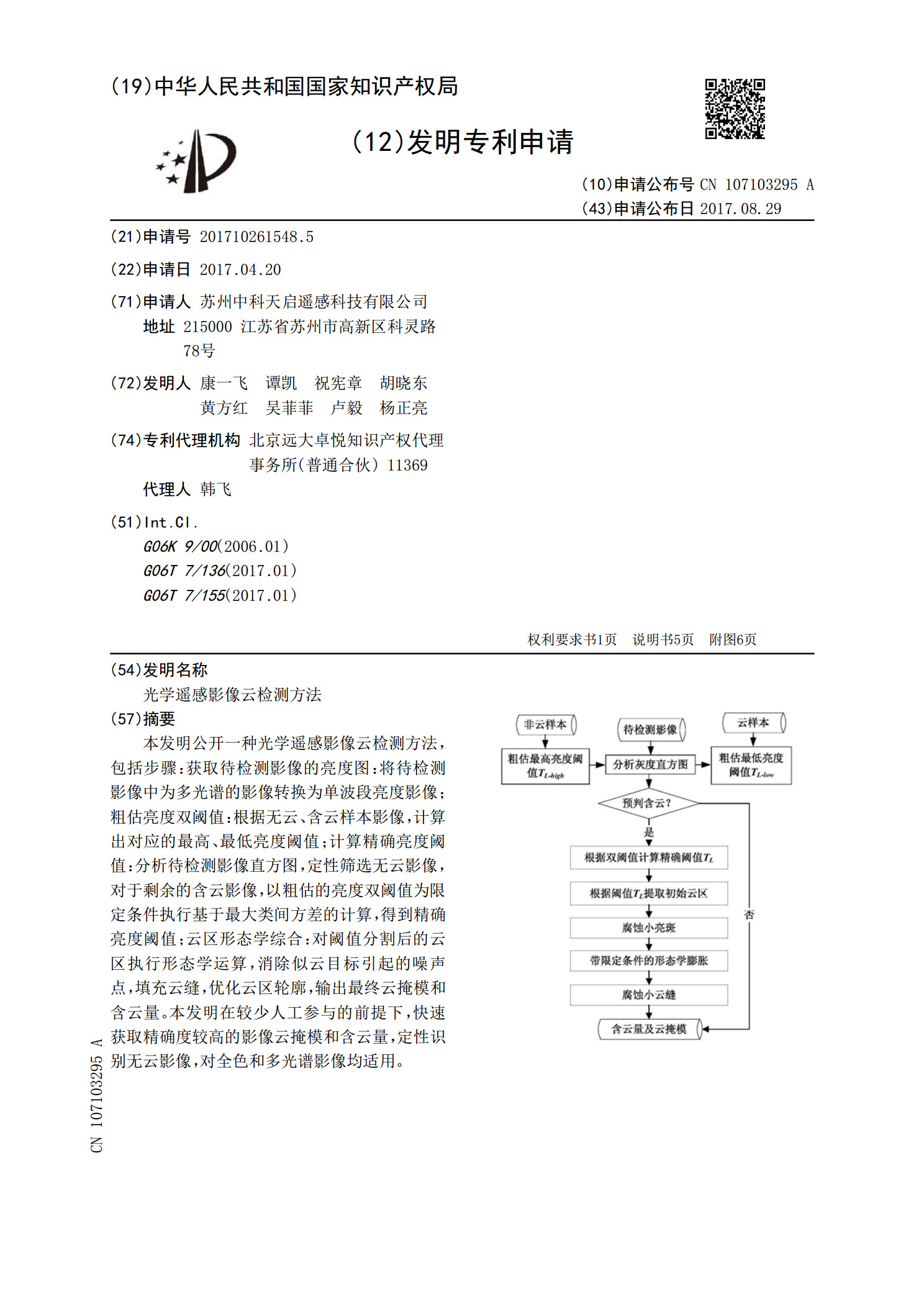
本发明公开一种光学遥感影像云检测方法,包括步骤:获取待检测影像的亮度图:将待检测影像中为多光谱的影像转换为单波段亮度影像;粗估亮度双阈值:根据无云、含云样本影像,计算出对应的最高、最低亮度阈值;计算精确亮度阈值:分析待检测影像直方图,定性筛选无云影像,对于剩余的含云影像,以粗估的亮度双阈值为限定条件执行基于最大类间方差的计算,得到精确亮度阈值;云区形态学综合:对阈值分割后的云区执行形态学运算,消除似云目标引起的噪声点,填充云缝,优化云区轮廓,输出最终云掩模和含云量。本发明在较少人工参与的前提下,快速获取精
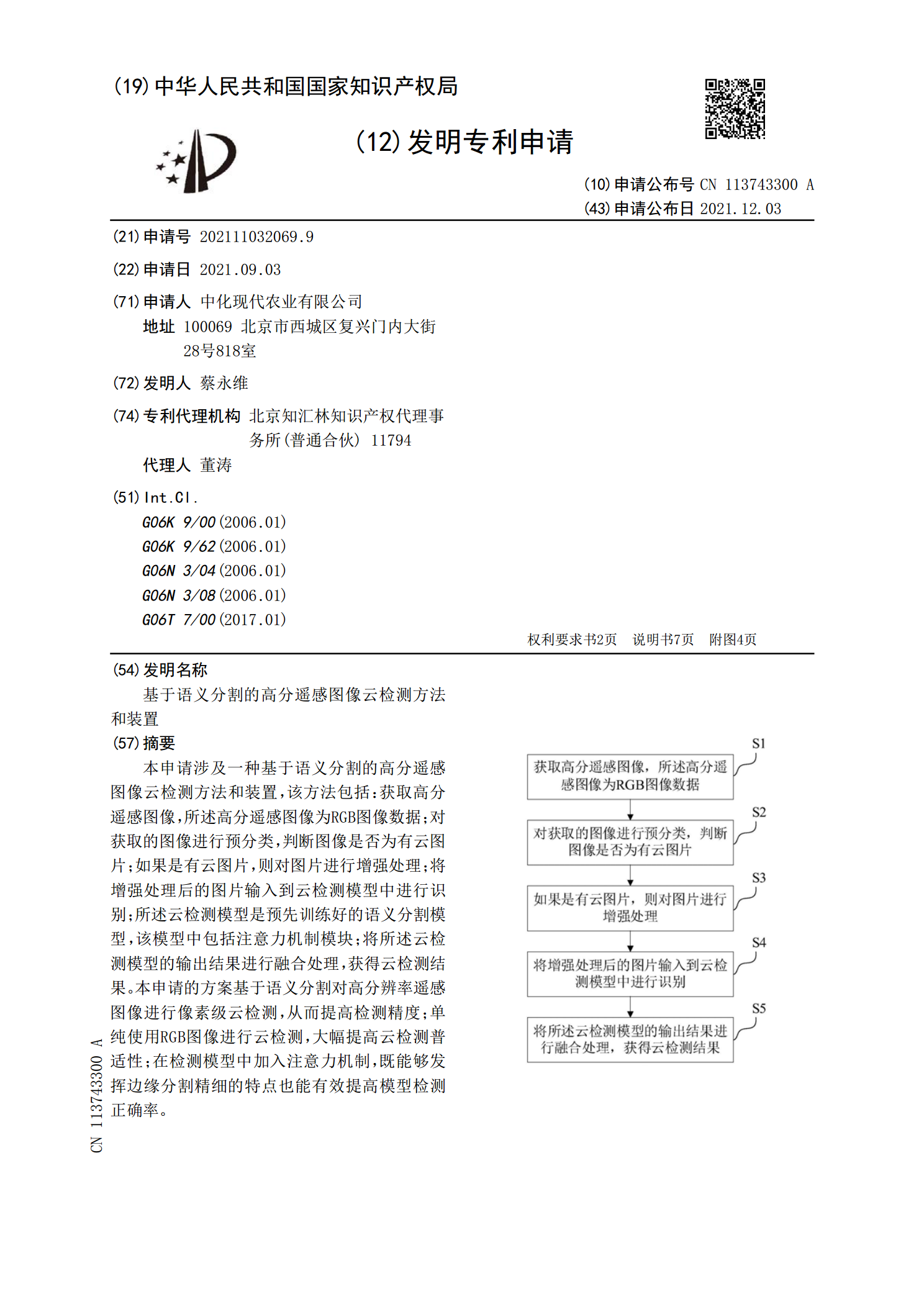
基于语义分割的高分遥感图像云检测方法和装置.pdf
本申请涉及一种基于语义分割的高分遥感图像云检测方法和装置,该方法包括:获取高分遥感图像,所述高分遥感图像为RGB图像数据;对获取的图像进行预分类,判断图像是否为有云图片;如果是有云图片,则对图片进行增强处理;将增强处理后的图片输入到云检测模型中进行识别;所述云检测模型是预先训练好的语义分割模型,该模型中包括注意力机制模块;将所述云检测模型的输出结果进行融合处理,获得云检测结果。本申请的方案基于语义分割对高分辨率遥感图像进行像素级云检测,从而提高检测精度;单纯使用RGB图像进行云检测,大幅提高云检测普适性;
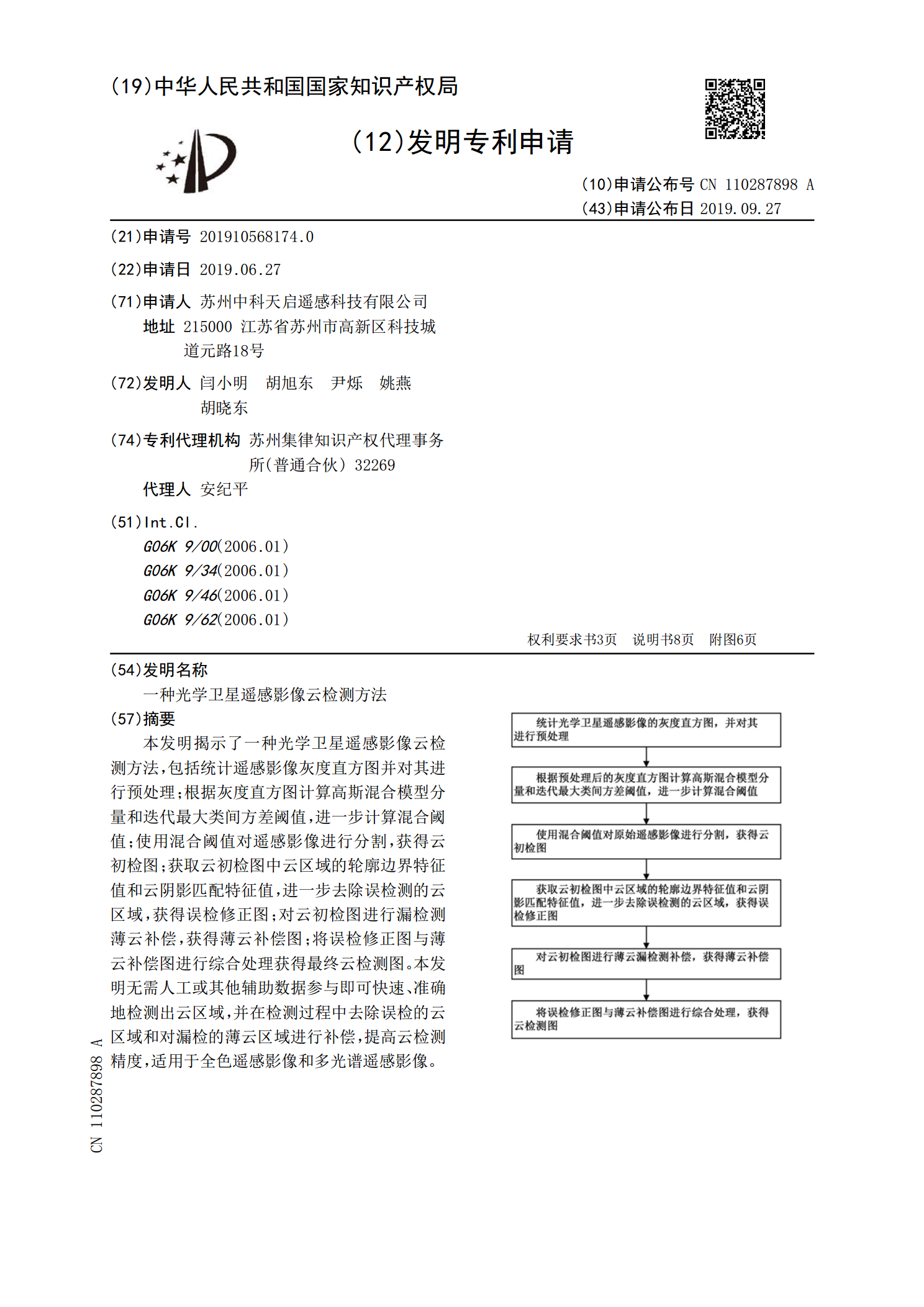
一种光学卫星遥感影像云检测方法.pdf
本发明揭示了一种光学卫星遥感影像云检测方法,包括统计遥感影像灰度直方图并对其进行预处理;根据灰度直方图计算高斯混合模型分量和迭代最大类间方差阈值,进一步计算混合阈值;使用混合阈值对遥感影像进行分割,获得云初检图;获取云初检图中云区域的轮廓边界特征值和云阴影匹配特征值,进一步去除误检测的云区域,获得误检修正图;对云初检图进行漏检测薄云补偿,获得薄云补偿图;将误检修正图与薄云补偿图进行综合处理获得最终云检测图。本发明无需人工或其他辅助数据参与即可快速、准确地检测出云区域,并在检测过程中去除误检的云区域和对漏检
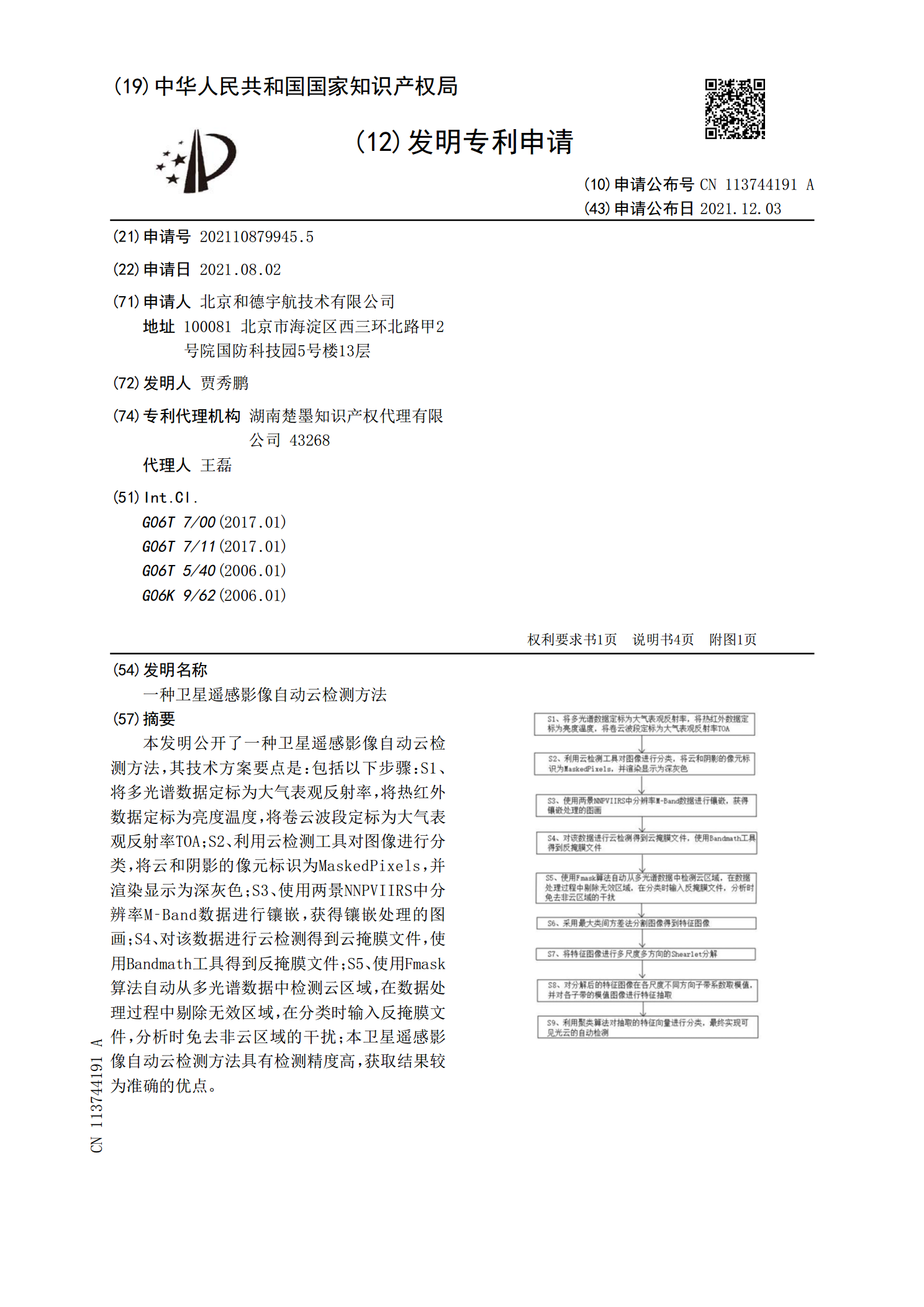
一种卫星遥感影像自动云检测方法.pdf
本发明公开了一种卫星遥感影像自动云检测方法,其技术方案要点是:包括以下步骤:S1、将多光谱数据定标为大气表观反射率,将热红外数据定标为亮度温度,将卷云波段定标为大气表观反射率TOA;S2、利用云检测工具对图像进行分类,将云和阴影的像元标识为MaskedPixels,并渲染显示为深灰色;S3、使用两景NNPVIIRS中分辨率M‑Band数据进行镶嵌,获得镶嵌处理的图画;S4、对该数据进行云检测得到云掩膜文件,使用Bandmath工具得到反掩膜文件;S5、使用Fmask算法自动从多光谱数据中检测云区域,在数据