
一种单声源目标被动定位方法.pdf

一只****懿呀


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种单声源目标被动定位方法.pdf
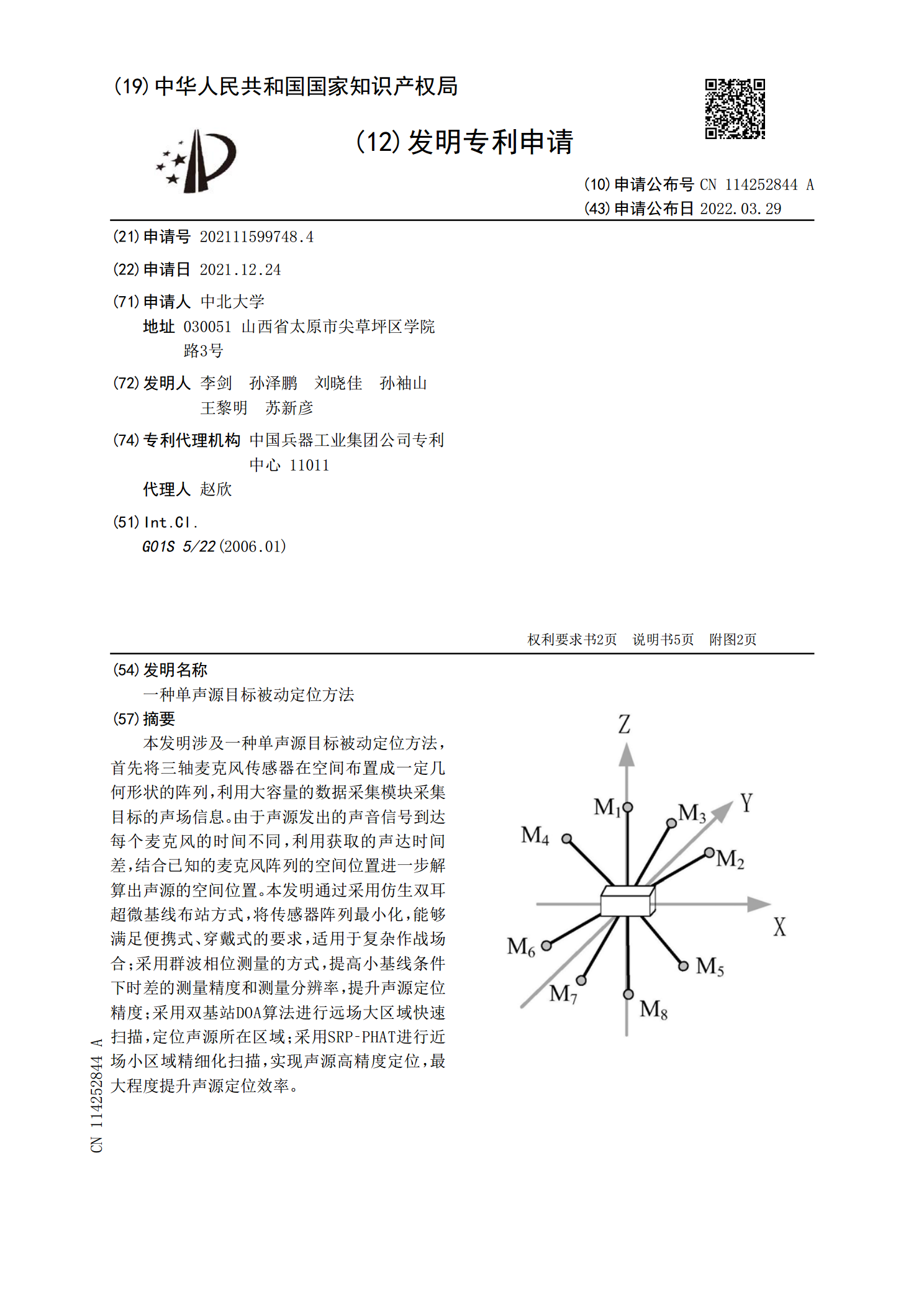
本发明涉及一种单声源目标被动定位方法,首先将三轴麦克风传感器在空间布置成一定几何形状的阵列,利用大容量的数据采集模块采集目标的声场信息。由于声源发出的声音信号到达每个麦克风的时间不同,利用获取的声达时间差,结合已知的麦克风阵列的空间位置进一步解算出声源的空间位置。本发明通过采用仿生双耳超微基线布站方式,将传感器阵列最小化,能够满足便携式、穿戴式的要求,适用于复杂作战场合;采用群波相位测量的方式,提高小基线条件下时差的测量精度和测量分辨率,提升声源定位精度;采用双基站DOA算法进行远场大区域快速扫描,定位声

被动声源定位算法的研究.pptx
,目录PartOnePartTwo背景介绍研究意义研究现状PartThree声源定位原理被动声源定位算法概述被动声源定位算法的关键技术PartFour数据采集和处理特征提取和选择定位算法的模型建立和优化实验结果分析和比较PartFive应用场景介绍被动声源定位算法的优势分析未来应用前景展望PartSix研究结论总结研究不足与展望THANKS

一种基于被动式声音信号的声源定位方法.pdf
本发明公开了一种基于被动式声音信号对声源进行定位的方法,目的是解决目前定位方法复杂度高、速度慢、精度较差、不适宜三维场景等问题。技术方案是首先选择线性麦克风阵列;选择声音传播模型为远场模型,搭建信号传播路径,简化远场声源定位模型,构建虚拟的壁镜麦克风阵列;然后采用自相关算法和互相关算法测量三种时延参数;基于三种时延参数建立三个损失函数;最后基于梯度下降方法最小化三个损失函数之和测量声源坐标。本发明在二维场景下定位声源比现有技术精度更高、速度更快,且本发明在三维场景同样也实现了较高的精度,解决了现有方法只能

一种基于单阵元阶梯变深的目标被动定位方法.pptx
汇报人:/目录0102定义与原理适用场景与优势方法流程03阶梯变深原理阵元选择与布局信号处理流程定位精度与误差分析04信号特征提取目标方位估计距离估计与校准定位结果输出05实验设置与数据采集定位精度比较与分析方法可靠性评估实际应用案例与效果06阵列优化设计信号处理算法改进误差抑制与补偿技术实时性能提升策略汇报人:

一种改进的声源目标成型波定位方法的研究.docx
一种改进的声源目标成型波定位方法的研究随着声源成型技术的快速发展,成型波定位已经成为了成型过程的关键部分之一,不断开展相关研究可以更好地提高成型波定位在声源成型中的应用。本文将探讨一种改进的声源目标成型波定位方法。首先,成型波定位是通过测量声波在空间上的传播速度、相位和振幅等属性来确定声源的位置和形状。传统的成型波定位方法中通常使用单一的传感器或者数个传感器对声波信号进行采集和处理,根据采集到的信号来计算声源的位置和形状。然而,这种方法存在一些问题,如定位误差大、鲁棒性差等。为了解决这些问题,我们提出了一