
无监督视觉目标跟踪方法及系统.pdf

含平****ng

1/9

2/9
3/9

4/9
5/9
6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
无监督视觉目标跟踪方法及系统.pdf
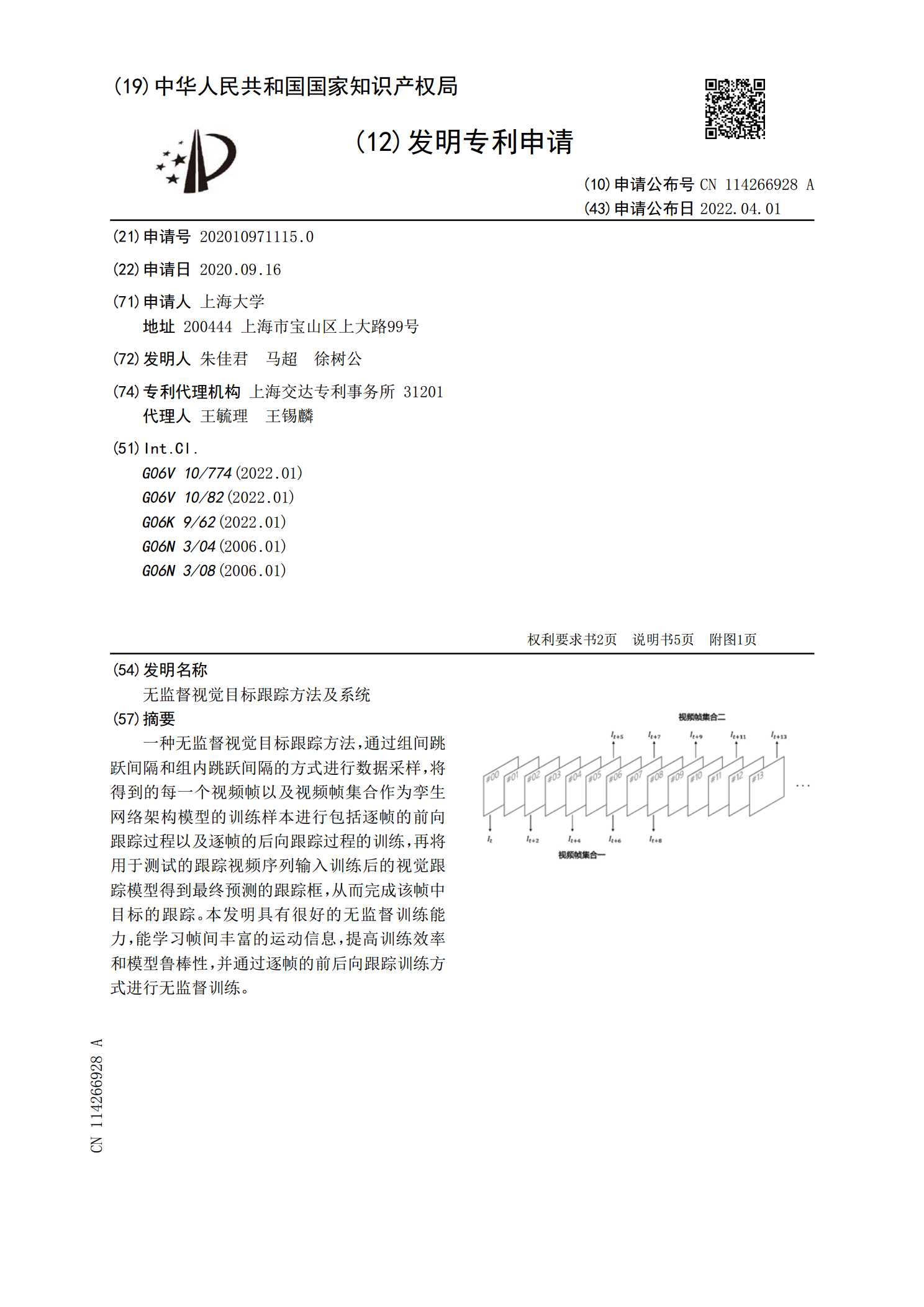
一种无监督视觉目标跟踪方法,通过组间跳跃间隔和组内跳跃间隔的方式进行数据采样,将得到的每一个视频帧以及视频帧集合作为孪生网络架构模型的训练样本进行包括逐帧的前向跟踪过程以及逐帧的后向跟踪过程的训练,再将用于测试的跟踪视频序列输入训练后的视觉跟踪模型得到最终预测的跟踪框,从而完成该帧中目标的跟踪。本发明具有很好的无监督训练能力,能学习帧间丰富的运动信息,提高训练效率和模型鲁棒性,并通过逐帧的前后向跟踪训练方式进行无监督训练。
基于对比学习的无监督视觉目标跟踪方法及系统.pdf
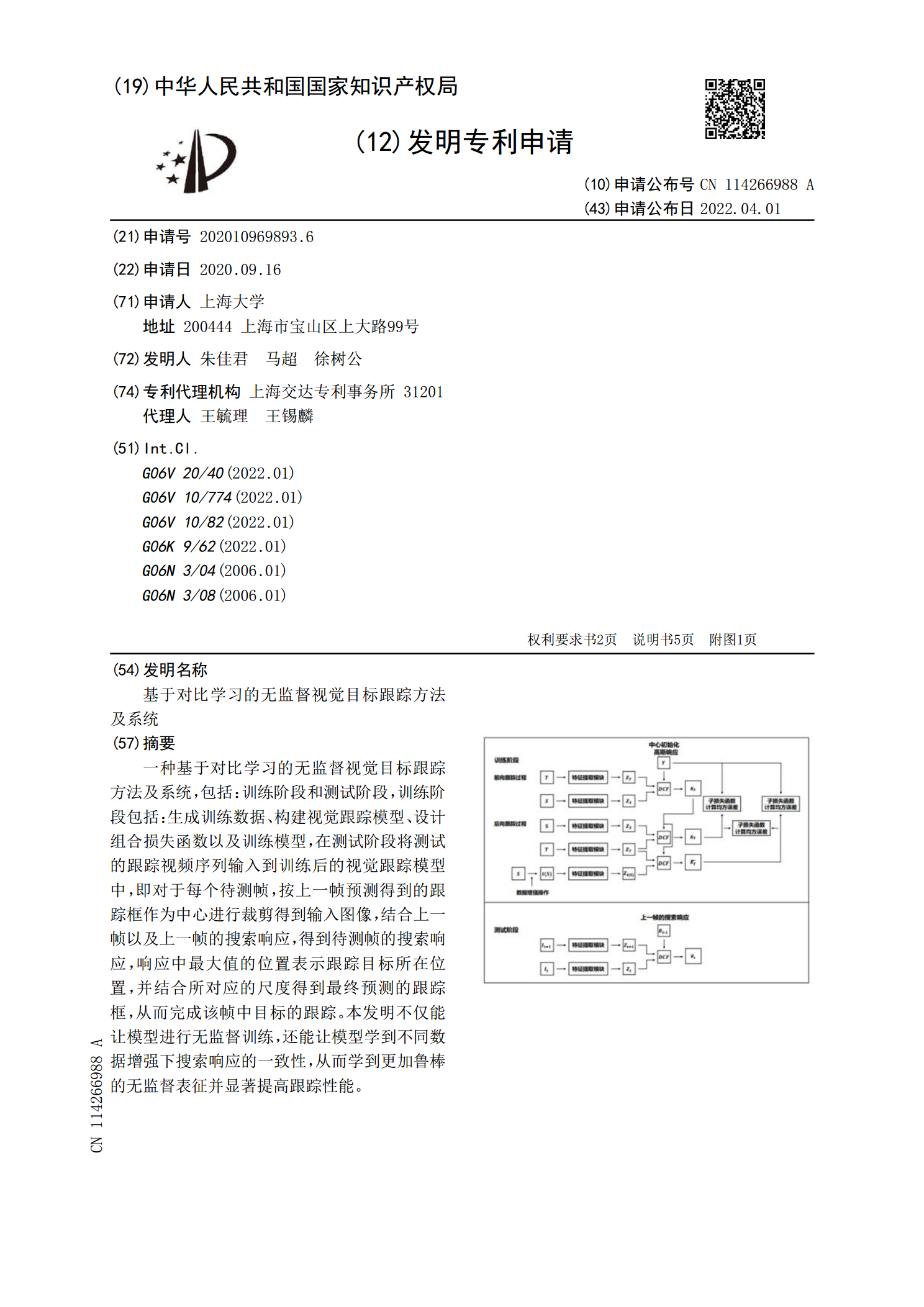
一种基于对比学习的无监督视觉目标跟踪方法及系统,包括:训练阶段和测试阶段,训练阶段包括:生成训练数据、构建视觉跟踪模型、设计组合损失函数以及训练模型,在测试阶段将测试的跟踪视频序列输入到训练后的视觉跟踪模型中,即对于每个待测帧,按上一帧预测得到的跟踪框作为中心进行裁剪得到输入图像,结合上一帧以及上一帧的搜索响应,得到待测帧的搜索响应,响应中最大值的位置表示跟踪目标所在位置,并结合所对应的尺度得到最终预测的跟踪框,从而完成该帧中目标的跟踪。本发明不仅能让模型进行无监督训练,还能让模型学到不同数据增强下搜索响

基于视觉质量驱动的无监督去雾系统及方法.pdf
本发明公开了一种基于视觉质量驱动的无监督去雾系统及方法,通过构建端到端网络学习有雾图像与无雾图像之间的映射关系,直接生成无雾图像;该系统由信息交互模块和迭代模块组成,其中,信息交互模块,用于实现对输入浅层特征的高效融合,完成细节信息和结构信息的交互,学习挖掘深层语义信息;迭代模块200,用于首先估计K(x),将K(x)值代入重组后大气散射模型中计算无雾图像,对去雾结果多次迭代细化,保留图像细节。与现有技术相比,本发明的去雾图像颜色更自然,去雾效果更好,且网络训练过程只需有雾图像,可从根本上避免域偏移现象发
无盲区多目标协同跟踪方法及系统.pdf
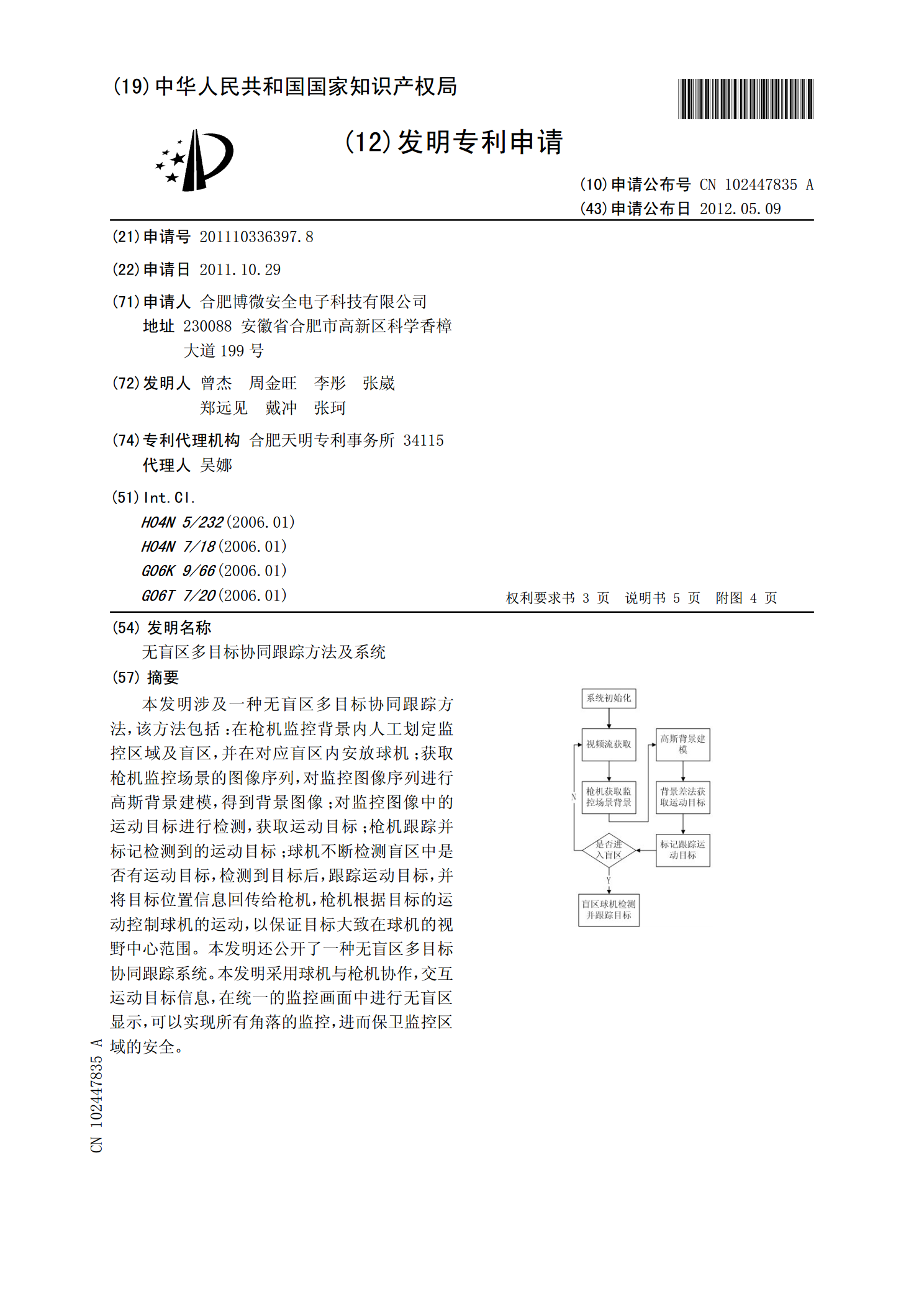
本发明涉及一种无盲区多目标协同跟踪方法,该方法包括:在枪机监控背景内人工划定监控区域及盲区,并在对应盲区内安放球机;获取枪机监控场景的图像序列,对监控图像序列进行高斯背景建模,得到背景图像;对监控图像中的运动目标进行检测,获取运动目标;枪机跟踪并标记检测到的运动目标;球机不断检测盲区中是否有运动目标,检测到目标后,跟踪运动目标,并将目标位置信息回传给枪机,枪机根据目标的运动控制球机的运动,以保证目标大致在球机的视野中心范围。本发明还公开了一种无盲区多目标协同跟踪系统。本发明采用球机与枪机协作,交互运动目标

基于分割的空间目标视觉跟踪方法.pdf
本发明公开了一种基于分割的空间目标视觉跟踪方法,该方法包括:S1,在首帧,通过矩形框选择空间目标区域,对目标区域初始化目标与背景图像特征,得到目标剪影区域。S2,在当前帧,根据目标和背景图像特征,通过剪影跟踪,得到当前帧的目标剪影区域;S3,根据当前帧的目标剪影区域,在线学习目标与背景图像特征。S4,重复步骤S2和步骤S3,得到空间目标在视频图像的区域信息。本发明的基于分割的空间目标视觉跟踪方法,无需首帧图像标记空间目标轮廓,只需首帧图像标记空间目标矩形区域即可完成在轨服务、交会对接、相对导航等过程中空间