
一种用于海上随钻声波测井时差提取方法、装置及系统.pdf

听容****55


1/10

2/10
3/10

4/10

5/10

6/10
7/10
8/10

9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种用于海上随钻声波测井时差提取方法、装置及系统.pdf
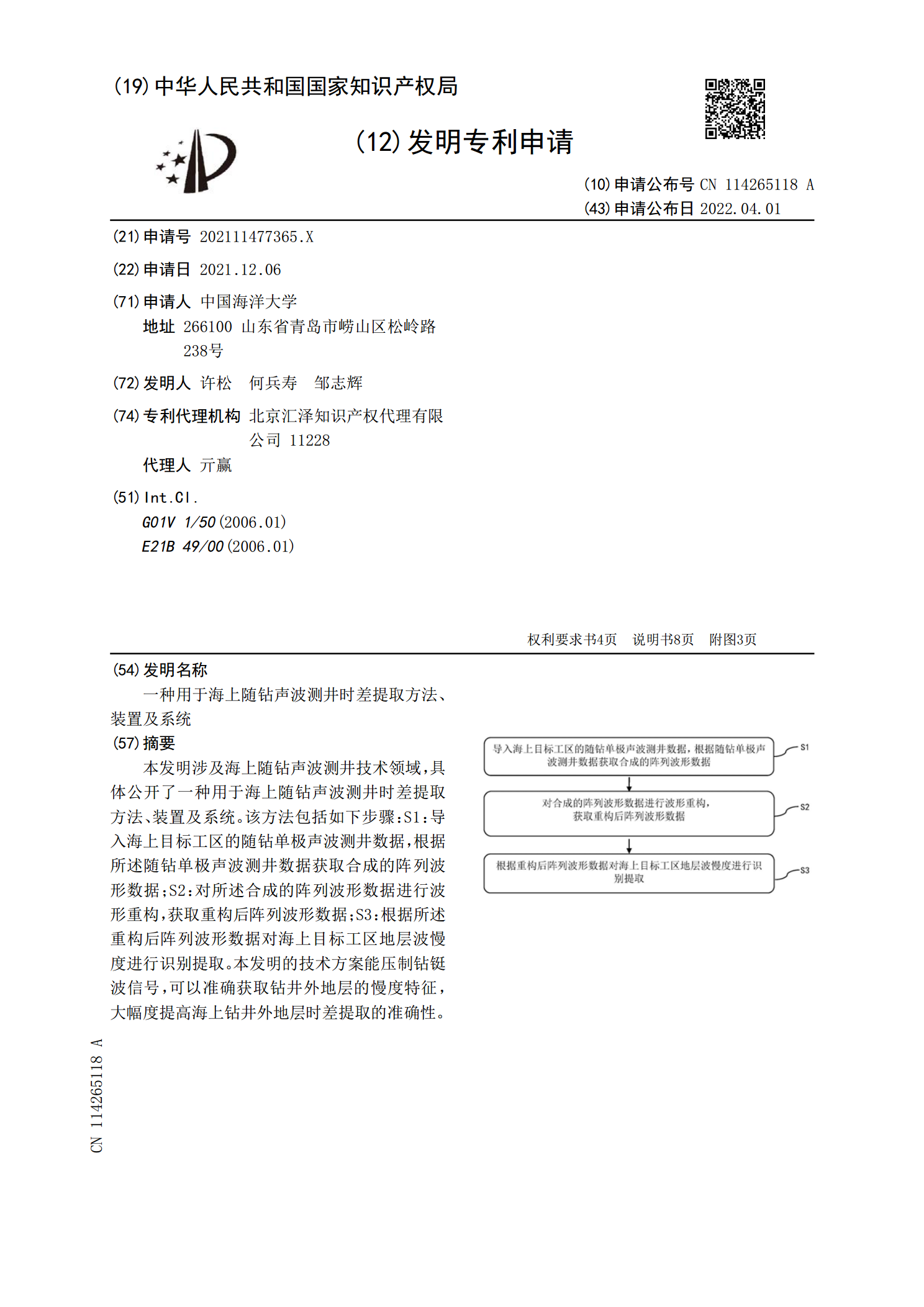
本发明涉及海上随钻声波测井技术领域,具体公开了一种用于海上随钻声波测井时差提取方法、装置及系统。该方法包括如下步骤:S1:导入海上目标工区的随钻单极声波测井数据,根据所述随钻单极声波测井数据获取合成的阵列波形数据;S2:对所述合成的阵列波形数据进行波形重构,获取重构后阵列波形数据;S3:根据所述重构后阵列波形数据对海上目标工区地层波慢度进行识别提取。本发明的技术方案能压制钻铤波信号,可以准确获取钻井外地层的慢度特征,大幅度提高海上钻井外地层时差提取的准确性。
一种随钻声波测井套管波衰减反演方法和装置.pdf
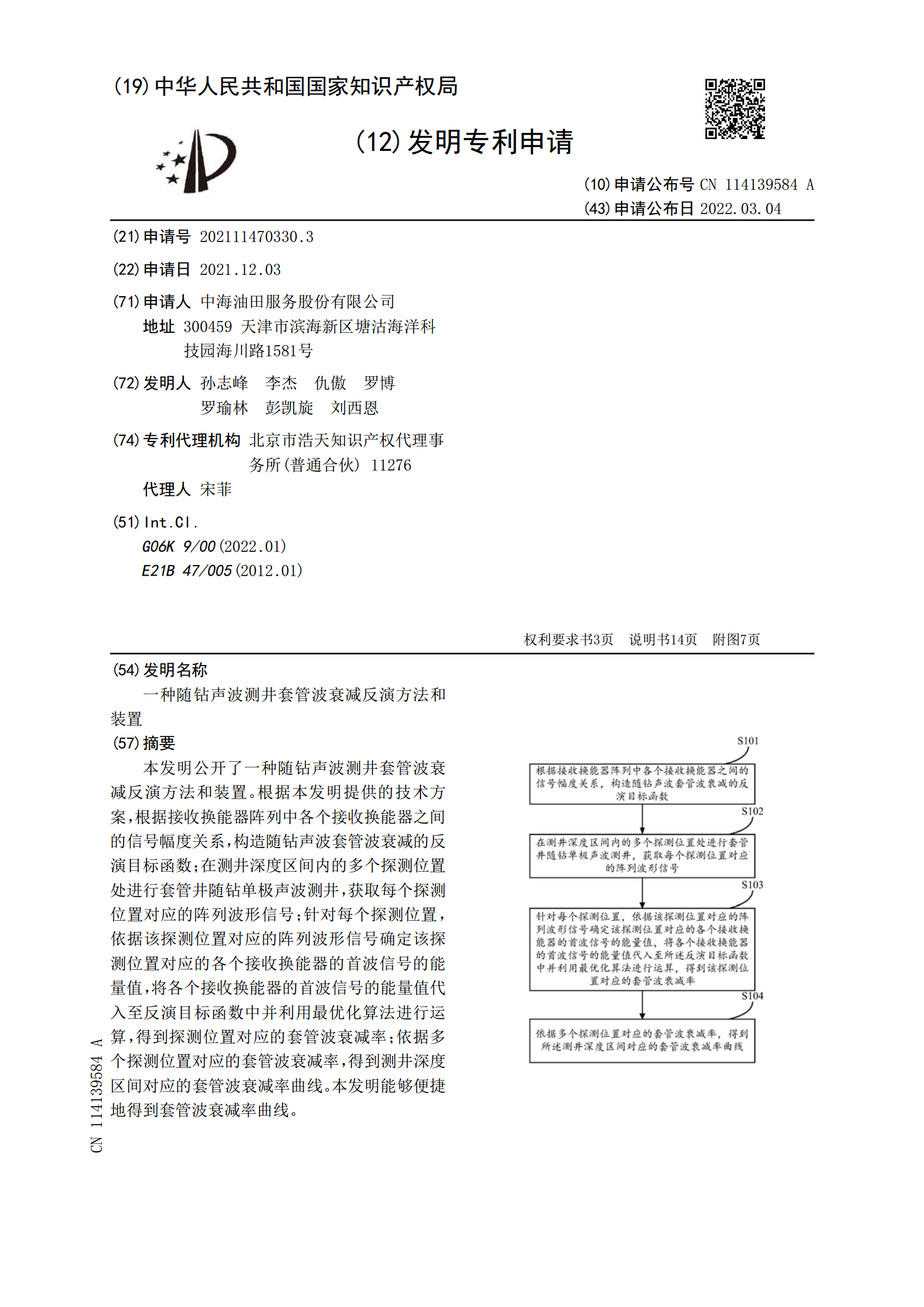
本发明公开了一种随钻声波测井套管波衰减反演方法和装置。根据本发明提供的技术方案,根据接收换能器阵列中各个接收换能器之间的信号幅度关系,构造随钻声波套管波衰减的反演目标函数;在测井深度区间内的多个探测位置处进行套管井随钻单极声波测井,获取每个探测位置对应的阵列波形信号;针对每个探测位置,依据该探测位置对应的阵列波形信号确定该探测位置对应的各个接收换能器的首波信号的能量值,将各个接收换能器的首波信号的能量值代入至反演目标函数中并利用最优化算法进行运算,得到探测位置对应的套管波衰减率;依据多个探测位置对应的套管
一种随钻声波测井仪器测试装置.pdf
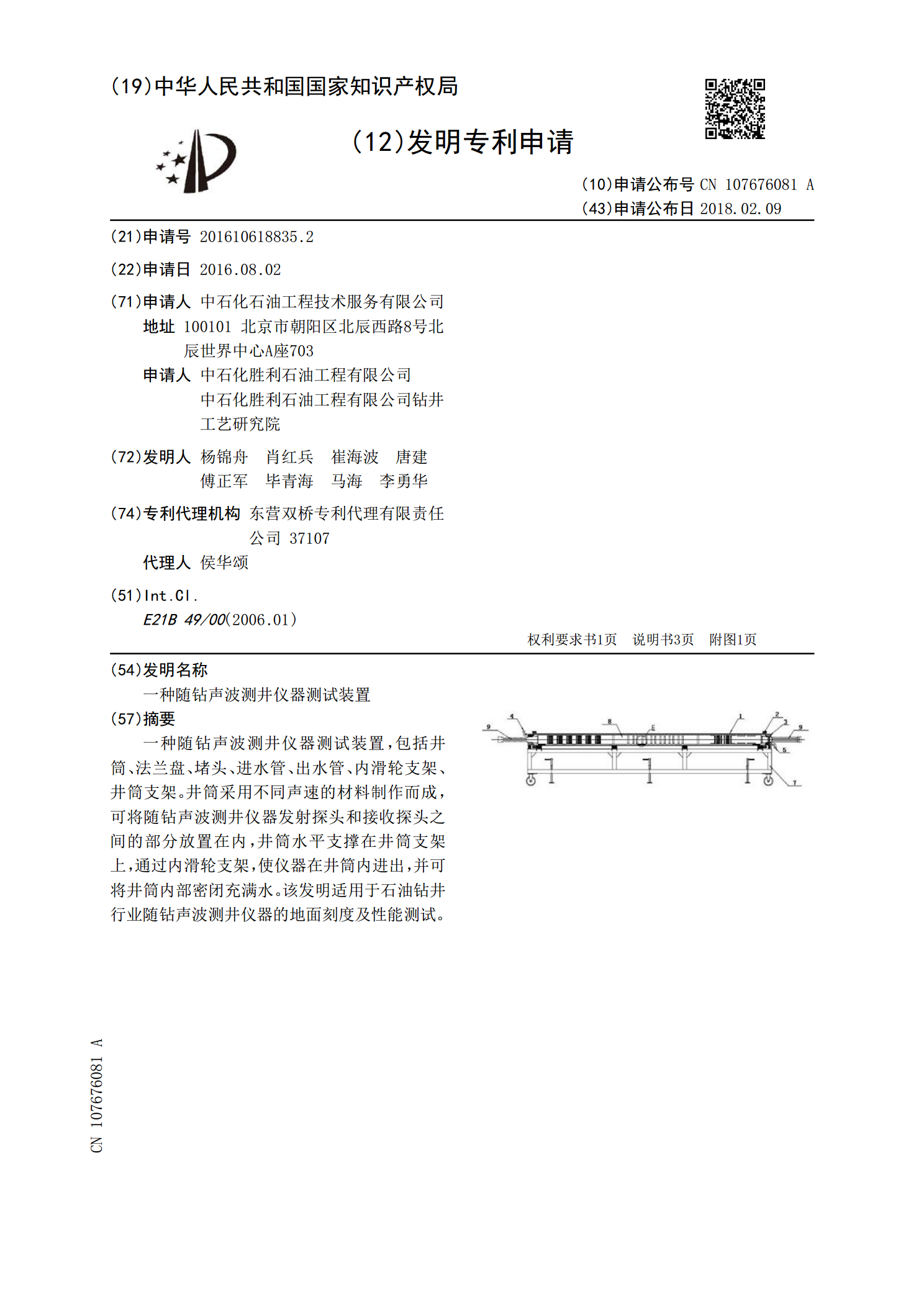
一种随钻声波测井仪器测试装置,包括井筒、法兰盘、堵头、进水管、出水管、内滑轮支架、井筒支架。井筒采用不同声速的材料制作而成,可将随钻声波测井仪器发射探头和接收探头之间的部分放置在内,井筒水平支撑在井筒支架上,通过内滑轮支架,使仪器在井筒内进出,并可将井筒内部密闭充满水。该发明适用于石油钻井行业随钻声波测井仪器的地面刻度及性能测试。

随钻声波测井.ppt
随钻声波测井2.随钻声波测井的优点基于声学原理的随钻声波测井仪器提供的资料可以用来降低不确定性,帮助工程师及时有效地进行决策。通过随钻声波测井仪器获得的数据不仅可以用来建立孔隙压力梯度和渗透率,探测并确定烃的类型,评估井眼稳固性,解释岩性变化,检测井眼中流体的流动影响,以及准确地设定套管下入深度。在制定对钻井成本和钻井效率有重大影响的一些关键决策时,及时获得这些数据显得尤为重要。3.随钻身波测井仪器的未来发展新一代随钻声波测井仪器可以帮助钻井人员、工程师和地质学家做出多种决策,提高钻井作业的安全性和成本效

用于无线随钻系统的井深测量装置及测量方法.pdf
本发明提供一种用于无线随钻系统的井深测量装置及测量方法,其中装置包括:井架、滑轮组、大钩、钻具、钢丝绳、绞车、绞车传感器以及数据采集装置,所述滑轮组固定在所述井架上,所述钢丝绳的一端缠绕于所述绞车的滚轴上,另一端经过滑轮组后固定,所述大钩与所述滑轮组固定连接,用于悬挂所述钻具,所述绞车传感器与所述绞车配合设置,所述数据采集装置用于获取绞车传感器采集的编码轮脉冲计数值,根据所述编码轮脉冲计数值计算井深;根据绞车传感器采集的编码轮脉冲计数值计算井深,使用方便,测量精度高。