
光丝间距调节系统及其调节方法.pdf

Jo****31


1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

光丝间距调节系统及其调节方法.pdf
本发明提供一种光丝间距调节系统及其调节方法。光丝间距调节系统包括焊接模块;光丝间距检测模块,所述光丝间距检测模块用于所述焊接模块的光丝间距的实际值;光丝间距调节模块,所述光丝间距调节模块与所述焊接模块连接,并用于调节所述光丝间距的大小;控制模块,所述控制模块分别与所述光丝间距检测模块和所述光丝间距调节模块连接,并用于控制所述光丝间距调节模块将所述光丝间距的实际值调节至目标值。该光丝间距调节系统能够快速便捷地调节光丝间距,且光丝间距调节的精度相对较高。
可调节的风机系统及其调节方法.pdf
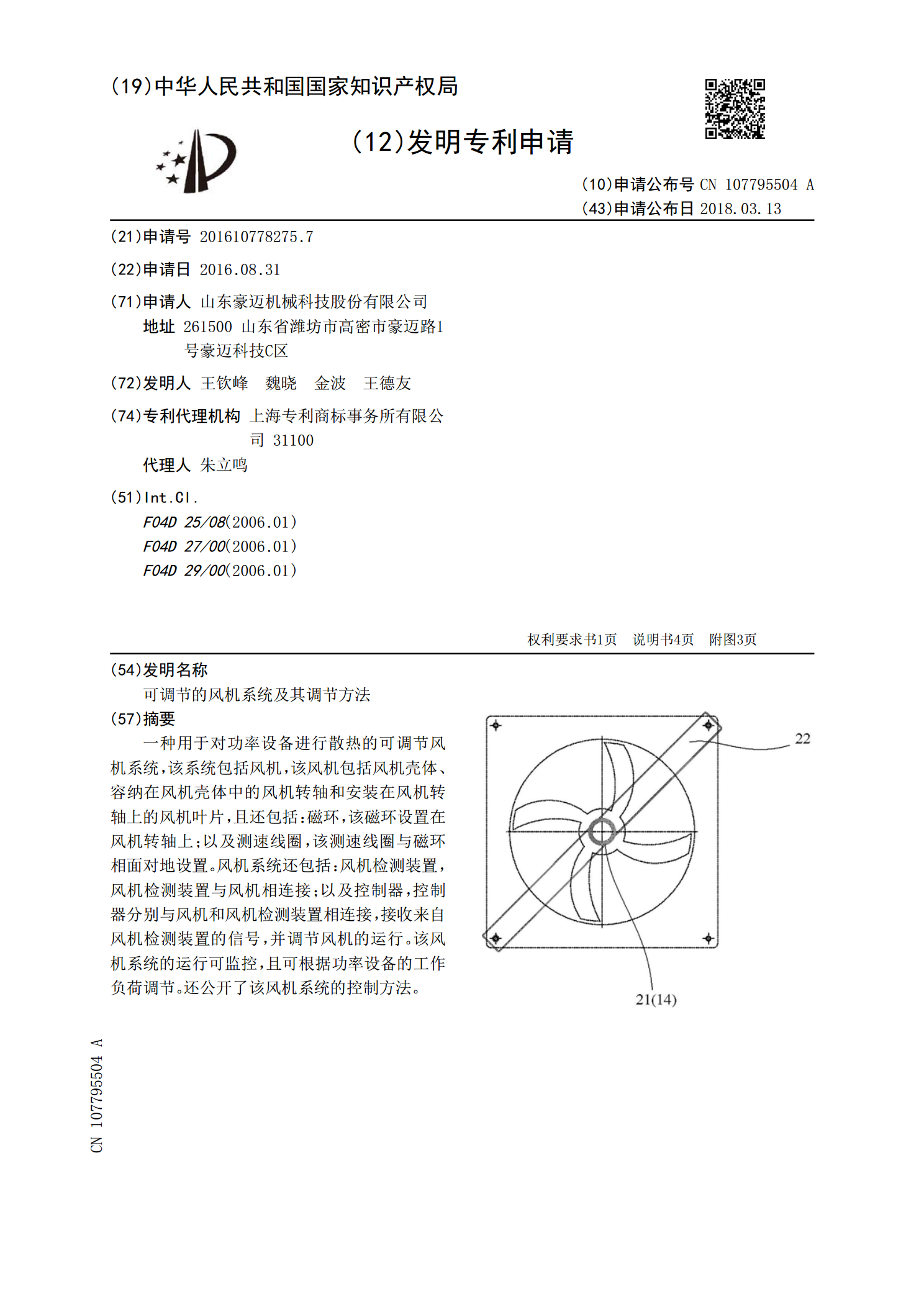
一种用于对功率设备进行散热的可调节风机系统,该系统包括风机,该风机包括风机壳体、容纳在风机壳体中的风机转轴和安装在风机转轴上的风机叶片,且还包括:磁环,该磁环设置在风机转轴上;以及测速线圈,该测速线圈与磁环相面对地设置。风机系统还包括:风机检测装置,风机检测装置与风机相连接;以及控制器,控制器分别与风机和风机检测装置相连接,接收来自风机检测装置的信号,并调节风机的运行。该风机系统的运行可监控,且可根据功率设备的工作负荷调节。还公开了该风机系统的控制方法。
桩架可变间距调节系统.pdf
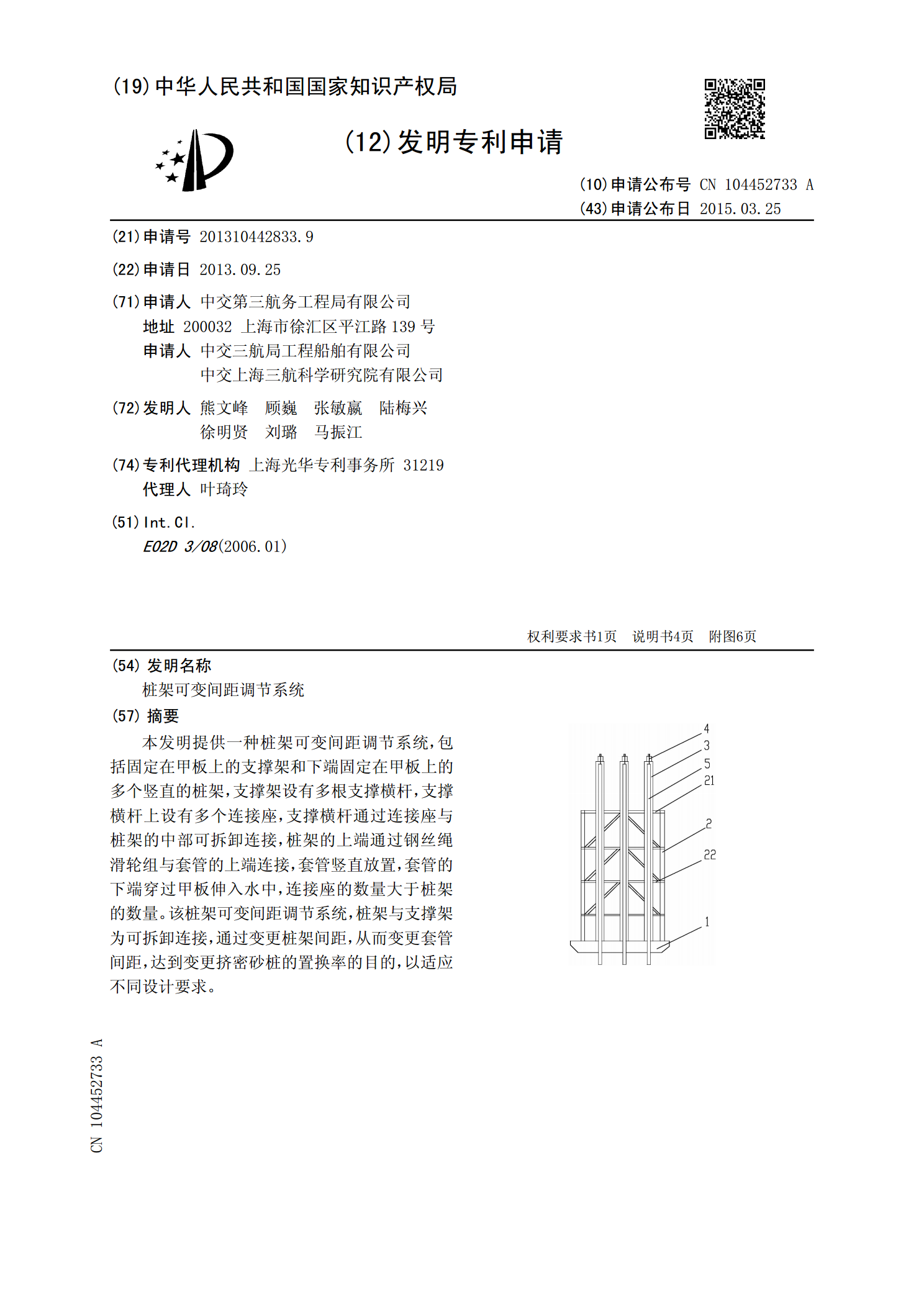
本发明提供一种桩架可变间距调节系统,包括固定在甲板上的支撑架和下端固定在甲板上的多个竖直的桩架,支撑架设有多根支撑横杆,支撑横杆上设有多个连接座,支撑横杆通过连接座与桩架的中部可拆卸连接,桩架的上端通过钢丝绳滑轮组与套管的上端连接,套管竖直放置,套管的下端穿过甲板伸入水中,连接座的数量大于桩架的数量。该桩架可变间距调节系统,桩架与支撑架为可拆卸连接,通过变更桩架间距,从而变更套管间距,达到变更挤密砂桩的置换率的目的,以适应不同设计要求。
埋线头间距电动调节机构及利用其的埋线头间距调节方法.pdf
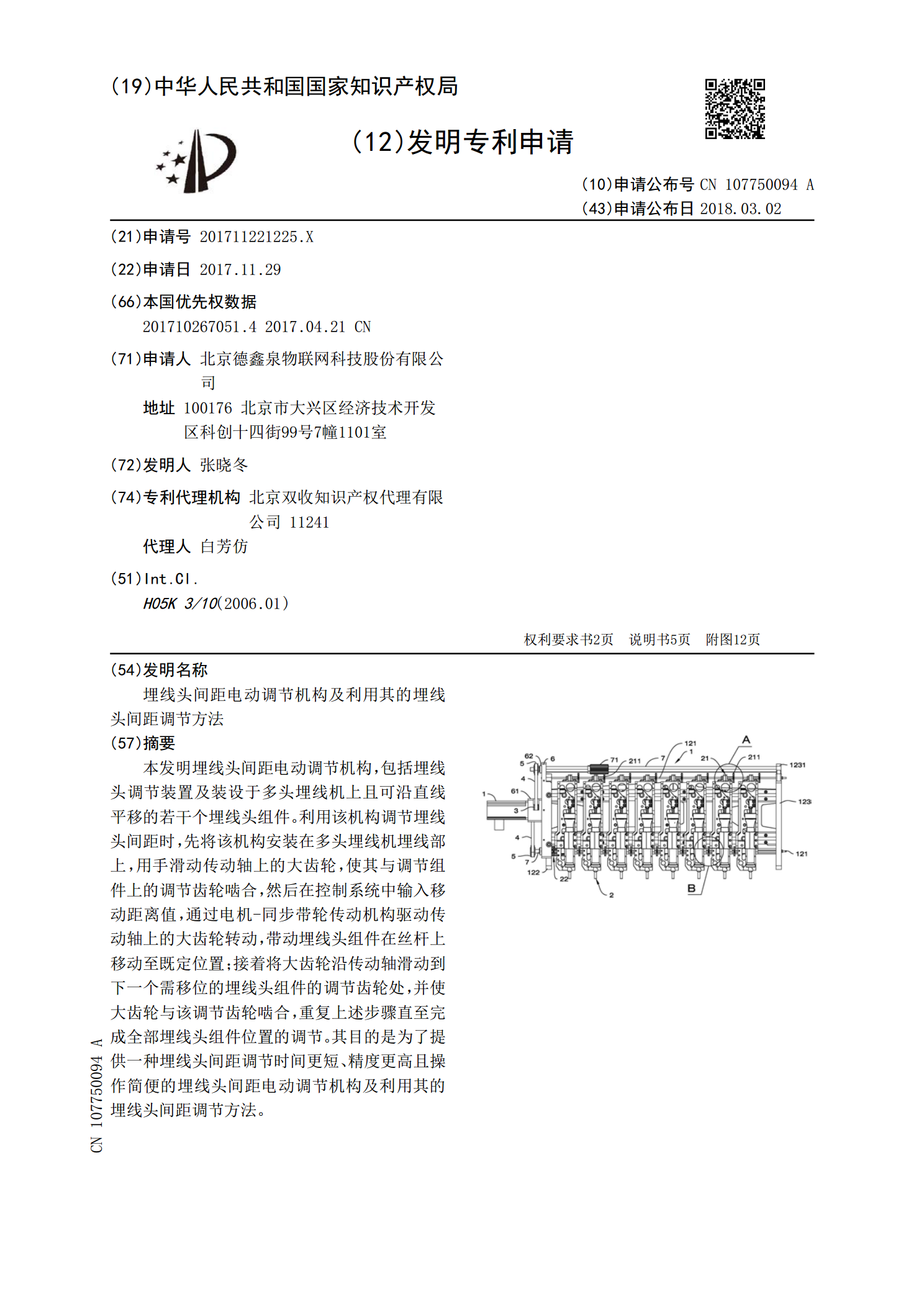
本发明埋线头间距电动调节机构,包括埋线头调节装置及装设于多头埋线机上且可沿直线平移的若干个埋线头组件。利用该机构调节埋线头间距时,先将该机构安装在多头埋线机埋线部上,用手滑动传动轴上的大齿轮,使其与调节组件上的调节齿轮啮合,然后在控制系统中输入移动距离值,通过电机‑同步带轮传动机构驱动传动轴上的大齿轮转动,带动埋线头组件在丝杆上移动至既定位置;接着将大齿轮沿传动轴滑动到下一个需移位的埋线头组件的调节齿轮处,并使大齿轮与该调节齿轮啮合,重复上述步骤直至完成全部埋线头组件位置的调节。其目的是为了提供一种埋线头

一种可精密调节间距的扩膜机及其调节方法.pdf
本发明涉及一种可精密调节间距的扩膜机及其调节方法,所述可精密调节间距的扩膜机包括:气缸和机械装置;所述气缸内设置有压力传感器和活塞,所述机械装置内设置有按键部件、精密马达和单片机系统;所述压力传感器、按键部件、精密马达均和单片机系统连接;所述精密马达还和活塞连接。操作者能够根据单片机系统对气压数据的处理结果在按键部件输入间距数据,按键部件将间距数据发送给单片机系统;所述单片机系统对间距数据进行处理得到控制指令,并将控制指令发送给精密马达;所述精密马达接收到控制指令,会做出相应的动作,控制活塞上下移动,从而