
自动布线方法及装置.pdf

猫巷****永安


1/10

2/10

3/10
4/10
5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
自动布线方法及装置.pdf
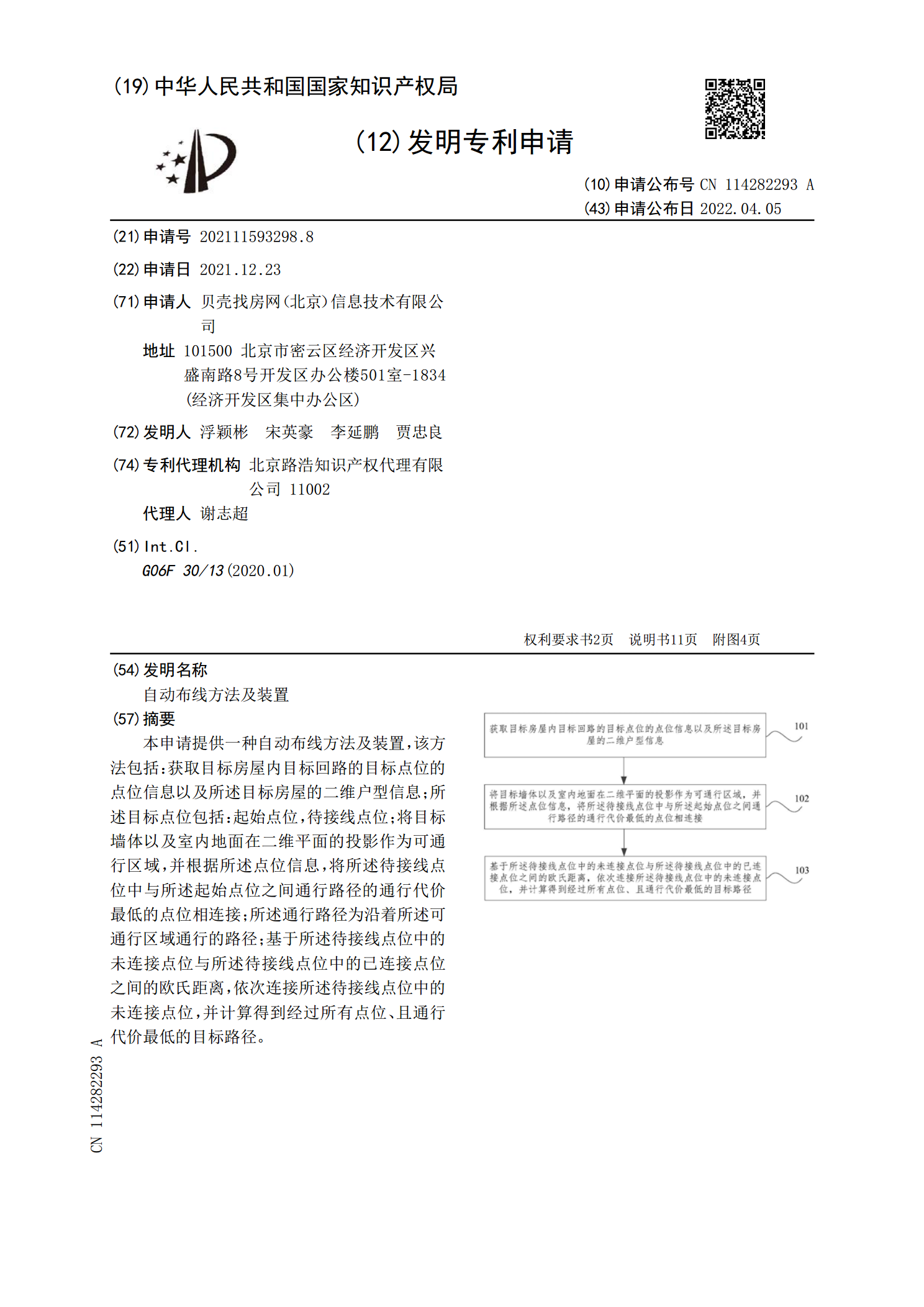
本申请提供一种自动布线方法及装置,该方法包括:获取目标房屋内目标回路的目标点位的点位信息以及所述目标房屋的二维户型信息;所述目标点位包括:起始点位,待接线点位;将目标墙体以及室内地面在二维平面的投影作为可通行区域,并根据所述点位信息,将所述待接线点位中与所述起始点位之间通行路径的通行代价最低的点位相连接;所述通行路径为沿着所述可通行区域通行的路径;基于所述待接线点位中的未连接点位与所述待接线点位中的已连接点位之间的欧氏距离,依次连接所述待接线点位中的未连接点位,并计算得到经过所有点位、且通行代价最低的目标

自动预布线装置.pdf
自动预布线装置,包括控制系统、布线支架、送线机构、剪线机构、布线笔组件和定位机构,定位机构包括定位座、X、Y、Z轴线性模组、电磁离合器、位置感应传感器、旋转驱动电机、旋转齿轮、动力齿轮、电机支架;所述布线笔组件包括引线轮、引线轮支架、笔杆、布线轮,引线轮通过轴固定在引线轮支架,引线轮支架固定在笔杆上,笔杆上设置贯通孔,导线通由布线轮引导;布线时,通过控制器控制定位机构移动至布线笔组件处,然后用电磁离合器吸住布线笔组件,调整布线笔杆位置,再由送线机构机构将线送入笔杆中,然后再由控制器控制定位机构,将调整好后
版图自动布线方法、装置、存储介质及电子设备.pdf
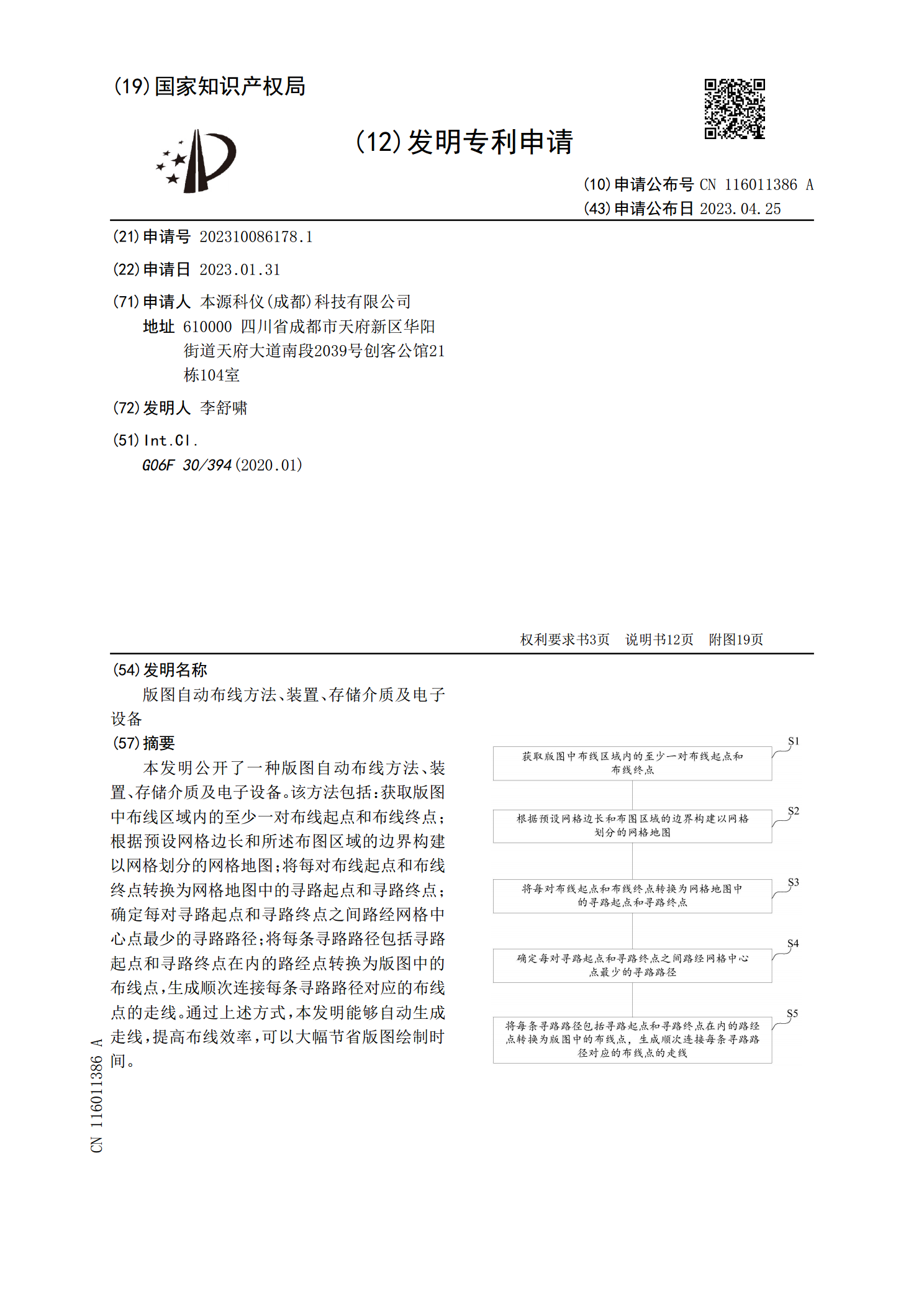
本发明公开了一种版图自动布线方法、装置、存储介质及电子设备。该方法包括:获取版图中布线区域内的至少一对布线起点和布线终点;根据预设网格边长和所述布图区域的边界构建以网格划分的网格地图;将每对布线起点和布线终点转换为网格地图中的寻路起点和寻路终点;确定每对寻路起点和寻路终点之间路经网格中心点最少的寻路路径;将每条寻路路径包括寻路起点和寻路终点在内的路经点转换为版图中的布线点,生成顺次连接每条寻路路径对应的布线点的走线。通过上述方式,本发明能够自动生成走线,提高布线效率,可以大幅节省版图绘制时间。

自动布局布线方法.pdf
本发明提供一种自动布局布线方法,包括获取测试版图数据;在测试版图数据中的顶层处的目标金属层处插入输入引脚和输出引脚标签;对测试版图数据进行抽取物理库信息,物理库信息包括版图后端布局布线所有层次;根据测试版图数据制作网表文件,网表文件包括顶层处的目标金属层的名字、输入引脚信息和输出引脚信息;利用物理库信息文件和网表文件以及设计版图文件导入到自动布局布线软件中;利用自动布线软件对设计版图进行结果检查。本发明提高了物理设计规则覆盖率,提高了设计效率。

一种自动布线及命名方法、装置、设备及介质.pdf
本申请公开了一种自动布线及命名方法,涉及计算机技术领域,该方法应用于预先开发的软件工具,包括:确定客户端选取的放置在原理图中的第一元器件和第二元器件,然后从预设数据库中获取并显示第一元器件和第二元器件分别对应的若干目标引脚的目标功能和组别信息;确定客户端根据待实现功能、所述目标功能和所述组别信息选取的第一元器件中的第一引脚和第二元器件中的第二引脚;自动连接第一引脚和第二引脚以获取目标信号线,并根据预设命名规则对目标信号线进行命名。由此可见,本申请利用预先开发的软件工具自动连接第一引脚和第二引脚以获取目标信