
一种多源数据融合引导方法.pdf

曾琪****是我

1/7

2/7

3/7
4/7

5/7

6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种多源数据融合引导方法.pdf
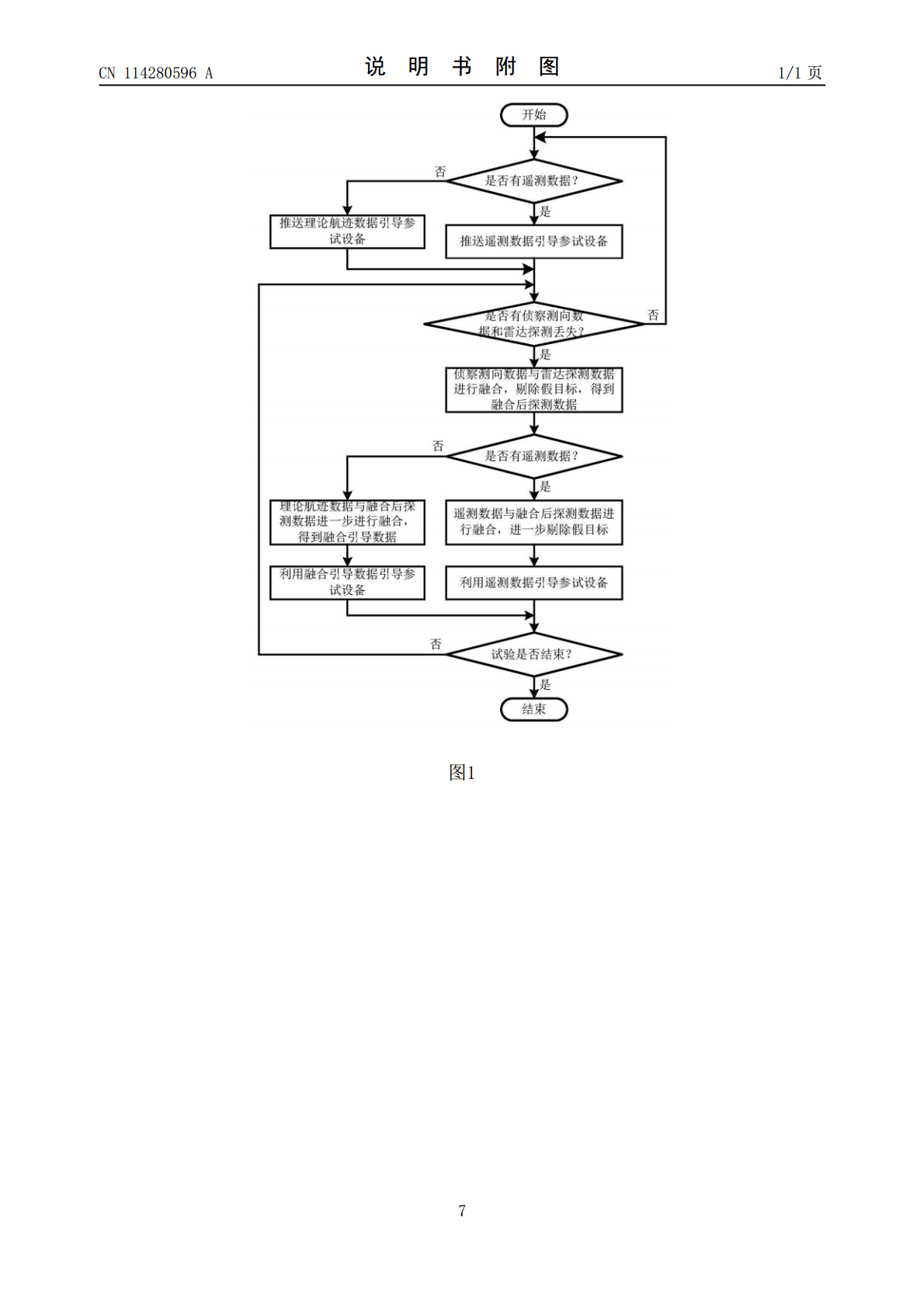
本发明公开了一种多源数据融合引导方法,通过融合遥测数据、理论航迹数据、侦察测向数据、雷达探测数据对参试设备进行引导,实现参试设备对高速运动目标的精确跟踪,并且能够通过侦察测向数据和雷达探测数据的融合来识别真假目标。
一种多源异构的数据融合方法及装置.pdf
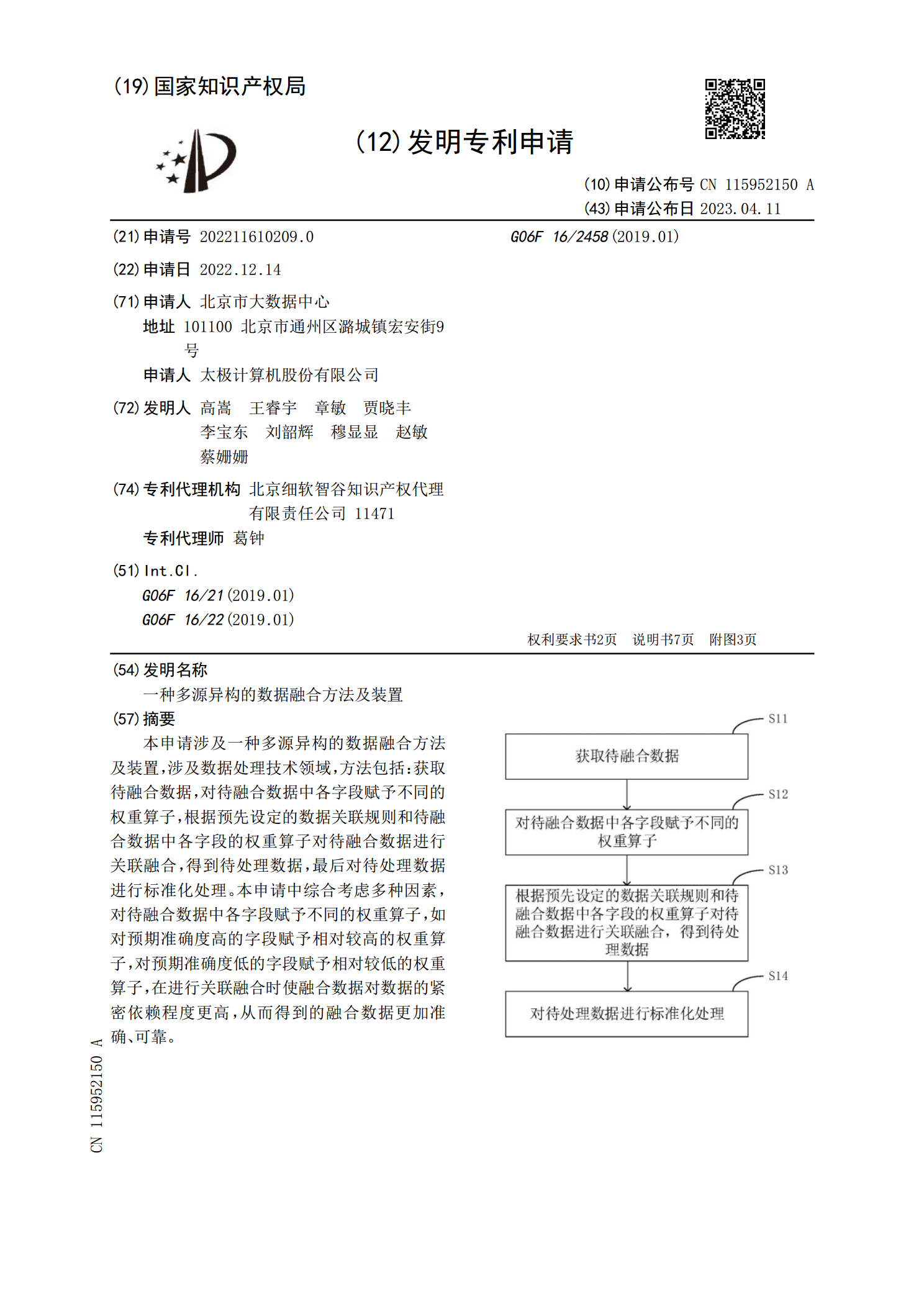
本申请涉及一种多源异构的数据融合方法及装置,涉及数据处理技术领域,方法包括:获取待融合数据,对待融合数据中各字段赋予不同的权重算子,根据预先设定的数据关联规则和待融合数据中各字段的权重算子对待融合数据进行关联融合,得到待处理数据,最后对待处理数据进行标准化处理。本申请中综合考虑多种因素,对待融合数据中各字段赋予不同的权重算子,如对预期准确度高的字段赋予相对较高的权重算子,对预期准确度低的字段赋予相对较低的权重算子,在进行关联融合时使融合数据对数据的紧密依赖程度更高,从而得到的融合数据更加准确、可靠。
一种基于UKF的实时多源数据融合方法.pdf
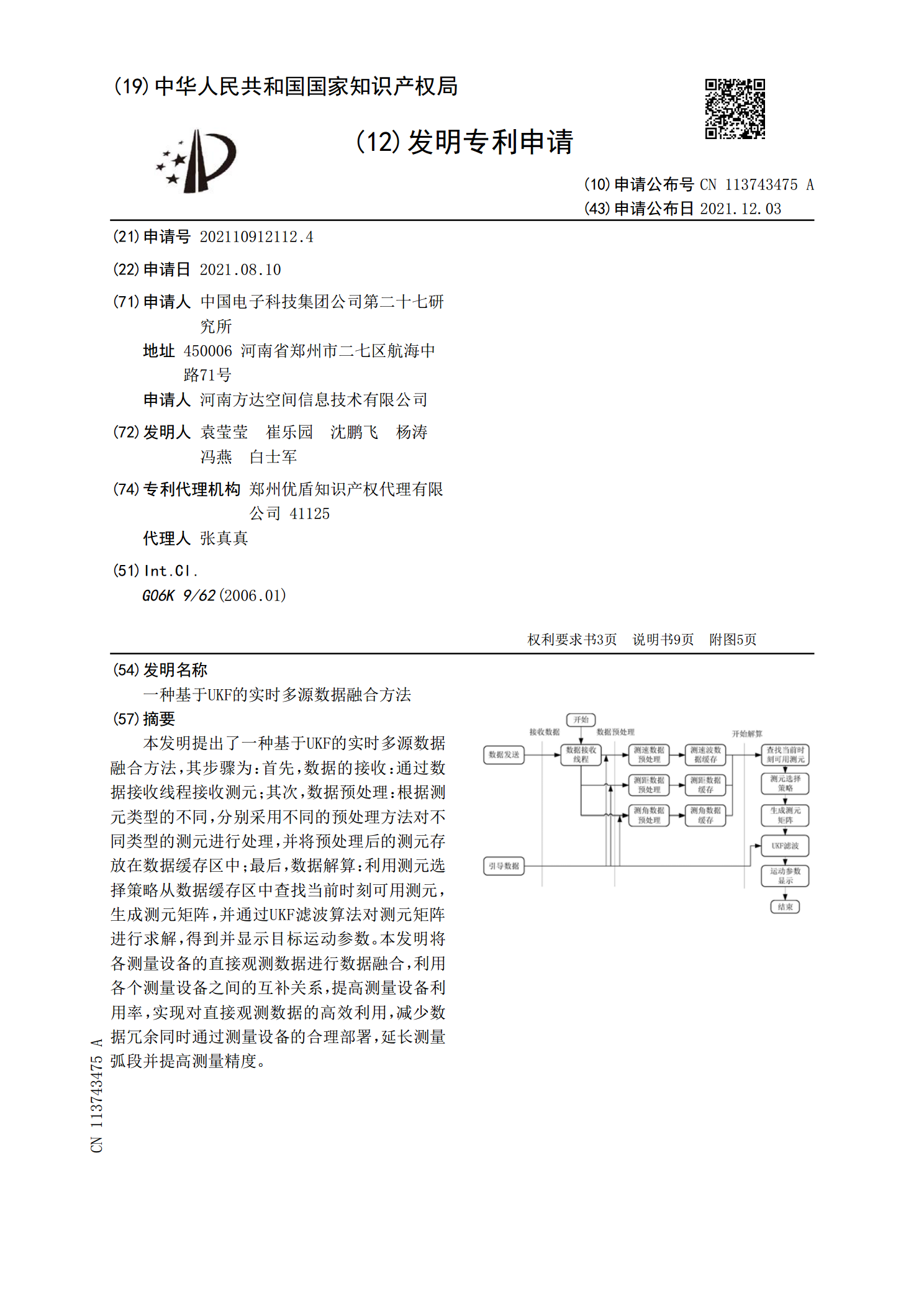
本发明提出了一种基于UKF的实时多源数据融合方法,其步骤为:首先,数据的接收:通过数据接收线程接收测元;其次,数据预处理:根据测元类型的不同,分别采用不同的预处理方法对不同类型的测元进行处理,并将预处理后的测元存放在数据缓存区中;最后,数据解算:利用测元选择策略从数据缓存区中查找当前时刻可用测元,生成测元矩阵,并通过UKF滤波算法对测元矩阵进行求解,得到并显示目标运动参数。本发明将各测量设备的直接观测数据进行数据融合,利用各个测量设备之间的互补关系,提高测量设备利用率,实现对直接观测数据的高效利用,减少数
多源异构数据融合优化方法.pdf
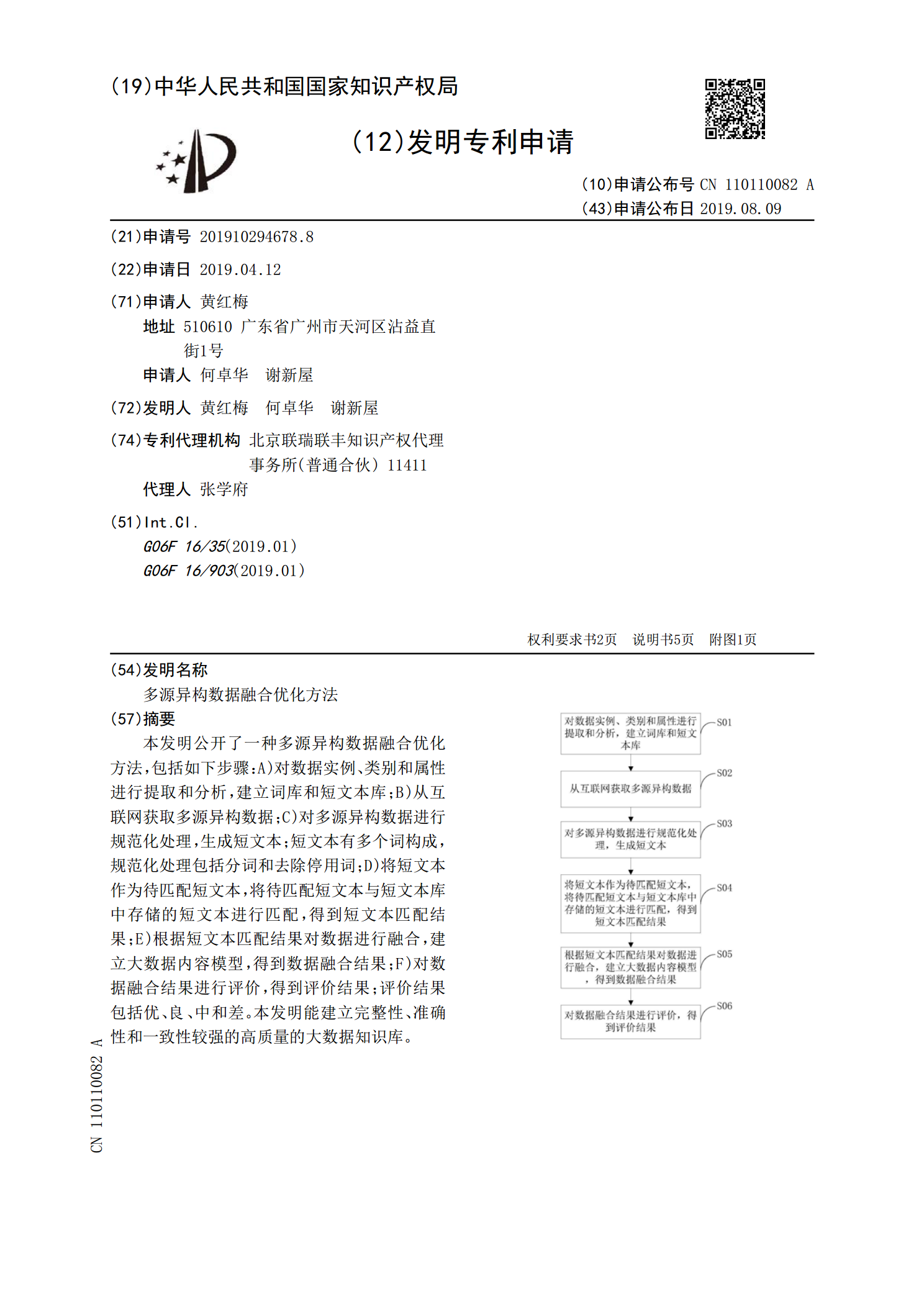
本发明公开了一种多源异构数据融合优化方法,包括如下步骤:A)对数据实例、类别和属性进行提取和分析,建立词库和短文本库;B)从互联网获取多源异构数据;C)对多源异构数据进行规范化处理,生成短文本;短文本有多个词构成,规范化处理包括分词和去除停用词;D)将短文本作为待匹配短文本,将待匹配短文本与短文本库中存储的短文本进行匹配,得到短文本匹配结果;E)根据短文本匹配结果对数据进行融合,建立大数据内容模型,得到数据融合结果;F)对数据融合结果进行评价,得到评价结果;评价结果包括优、良、中和差。本发明能建立完整性、
多源遥感数据融合理论与方法.ppt
多源遥感数据融合理论与方法目录Bayes统计理论Bayes统计理论在考虑可靠度情况下传感器测量需要解决的一个关键问题:真值和测量值。考察一个随机试验,在该试验中n个互不相容的事件A1,A2,…,An必然会发生一个,且只能发生一个,用P(Ai)表示Ai发生的概率,则有:Bayes统计理论Bayes统计理论Bayes统计理论Bayes统计理论基于Bayes估计的身份识别方法基于Bayes估计的身份识别方法基于Bayes估计的身份识别方法基于Bayes估计的身份识别方法基于Bayes估计的身份识别方法基于Bay