
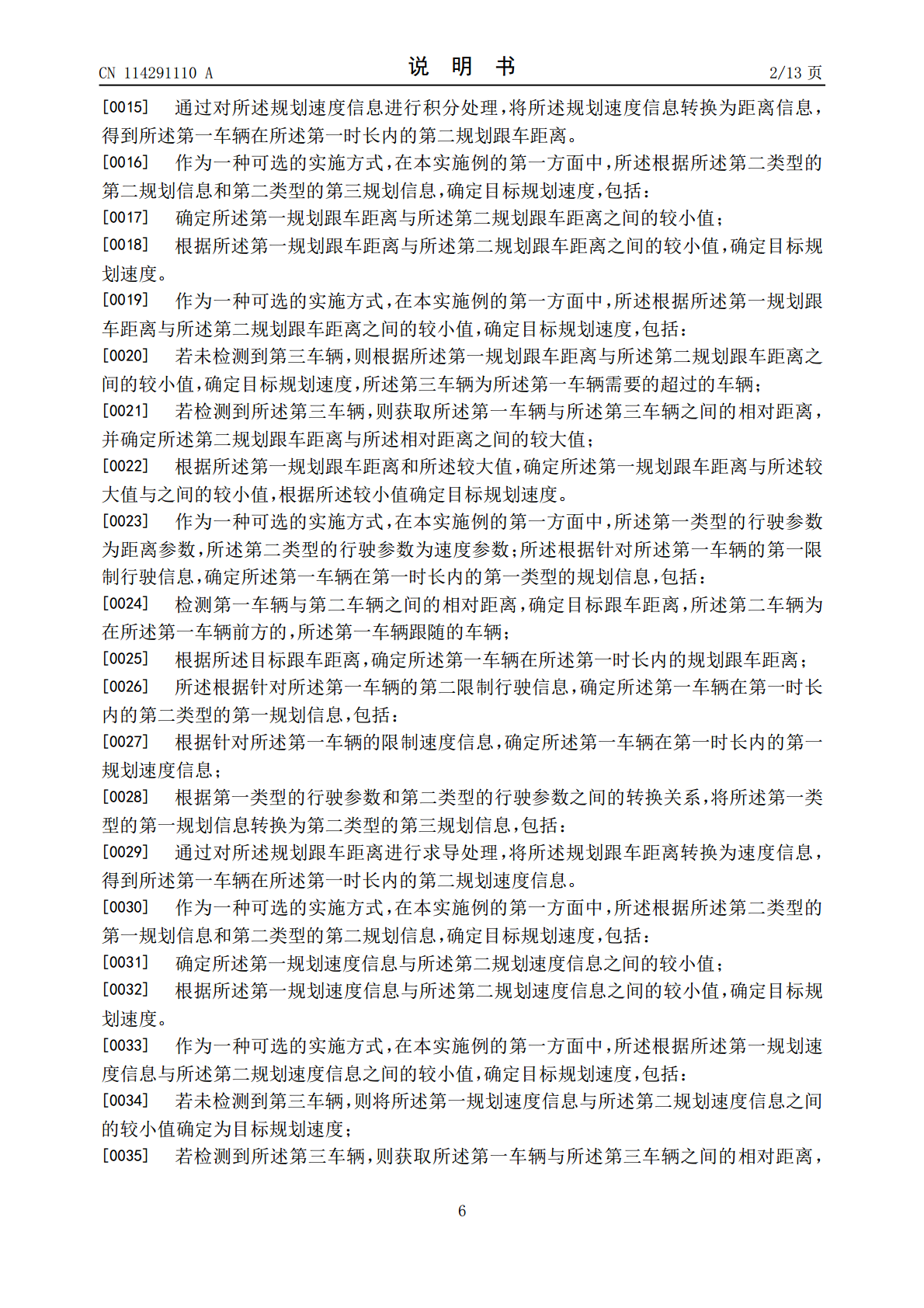
车辆控制方法、装置、电子设备及存储介质.pdf

努力****恨风

1/10
2/10
3/10

4/10
5/10
6/10
7/10

8/10

9/10

10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
车辆的控制方法、装置、电子设备及存储介质.pdf
本公开提出了一种车辆的控制方法、装置、电子设备及存储介质,涉及自动驾驶车辆智能控制技术领域,该方法包括:响应于与车辆建立通信,在显示屏幕中显示待控设备清单,其中,所述待控设备为所述车辆的内置设备;响应于检测到用户的至少一个生理特征的指数值处于预设区间,将所述生理特征的标识,以及所述指数值发送给所述车辆,以使所述车辆根据所述指数值对与所述生理特征的标识关联的待控设备进行控制。通过可穿戴设备自主的对用户进行监测,并可以及时的对车辆进行反馈控制,避免用户因为身体不适而使用车辆所引起的隐患。
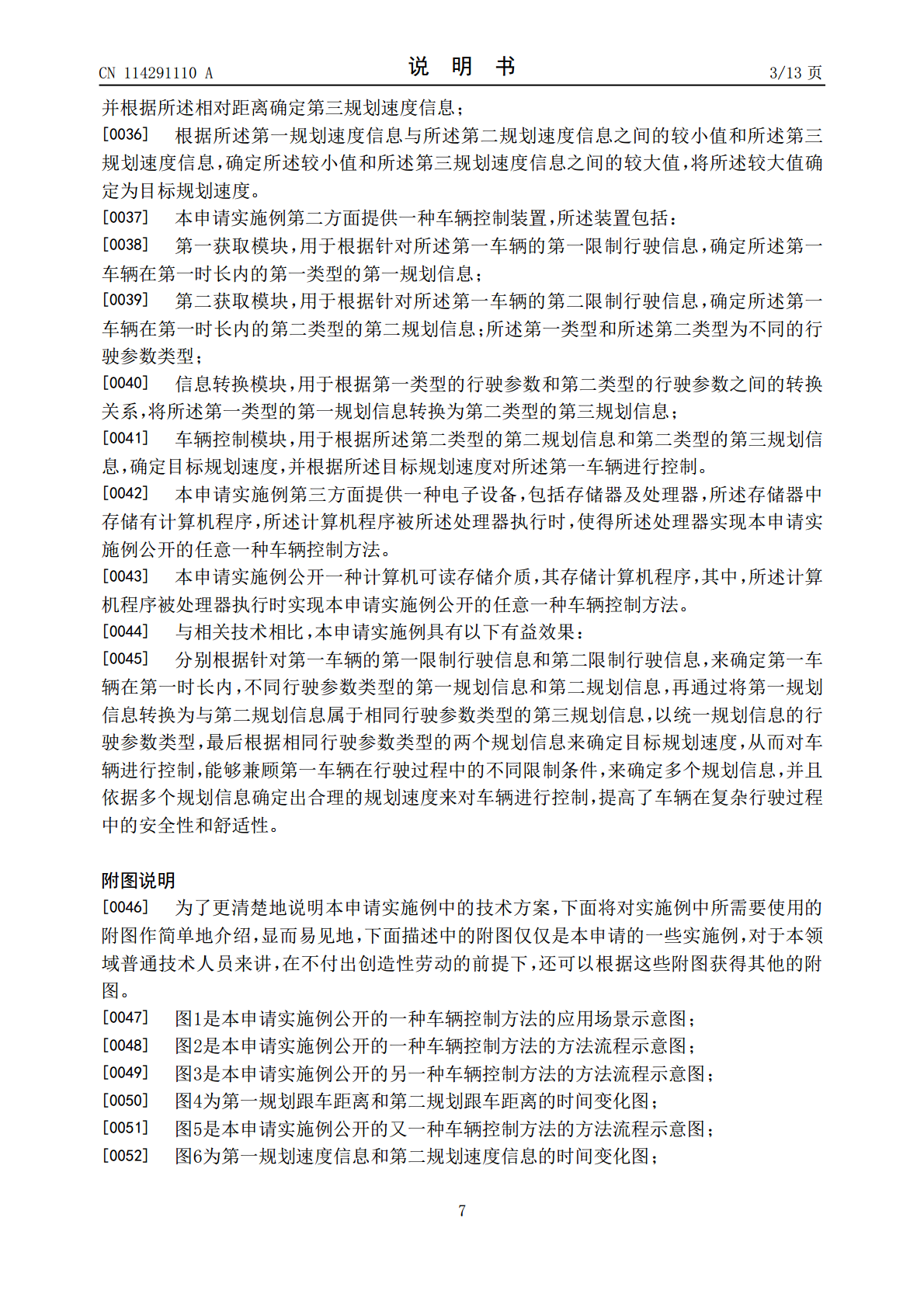
车辆控制方法、装置、存储介质及电子设备.pdf
本公开涉及一种车辆控制方法、装置、存储介质及电子设备,可根据不同用户在不同状态的困扰,对车辆进行控制。该方法包括:响应于目标用户的登陆操作登陆目标账号以及控制操作,获取所述目标用户的生物特征信息;根据所述生物特征信息从所述目标账号对应的多个预设控制参数中,确定出对应所述目标用户的预设控制参数,所述预设控制参数包括如下子参数:所述车辆的座椅控制参数、空调控制参数、方向盘控制参数、杯托控制参数、车载音响控制参数以及香氛控制参数;根据所述预设控制参数调整所述车辆的运行状态。根据预设参数调整车辆的运行状态,实现根

车辆控制方法、装置、电子设备及存储介质.pdf
本发明实施例公开了一种车辆控制方法、装置、电子设备及存储介质。其中,方法包括:获取当前时刻目标车辆的目标功能程序的激活状态,以及所处路面的目标坡度;根据激活状态和/或目标坡度确定作用于离合器上的油压,以对目标车辆进行控制。本发明实施例的方案,解决了车辆在坡路上容易溜车而造成交通事故的问题,同时也可以最大程度地保证车辆的整体性能,也不会引起其他的负面影响。

车辆控制方法、装置、电子设备及存储介质.pdf
本发明实施例公开了一种车辆控制方法、装置、电子设备及存储介质,该方法包括:获取目标区域内的待识别用户的面部特征信息;若所述面部特征信息与预设面部特征信息相匹配,则将所述待识别用户确定为目标用户,并获取所述目标用户的多模态信息;其中,所述多模态信息包括语音信息以及口型信息;基于所述多模态信息确定相应的调控指令,以使目标车辆基于所述调控指令执行相应的功能。本发明实施例的技术方案,以简便的方式增加了车辆召唤功能的实现途径,同时增强了车辆控制过程中的安全性,提高了用户的使用体验。
车辆控制方法、装置、存储介质及电子设备.pdf
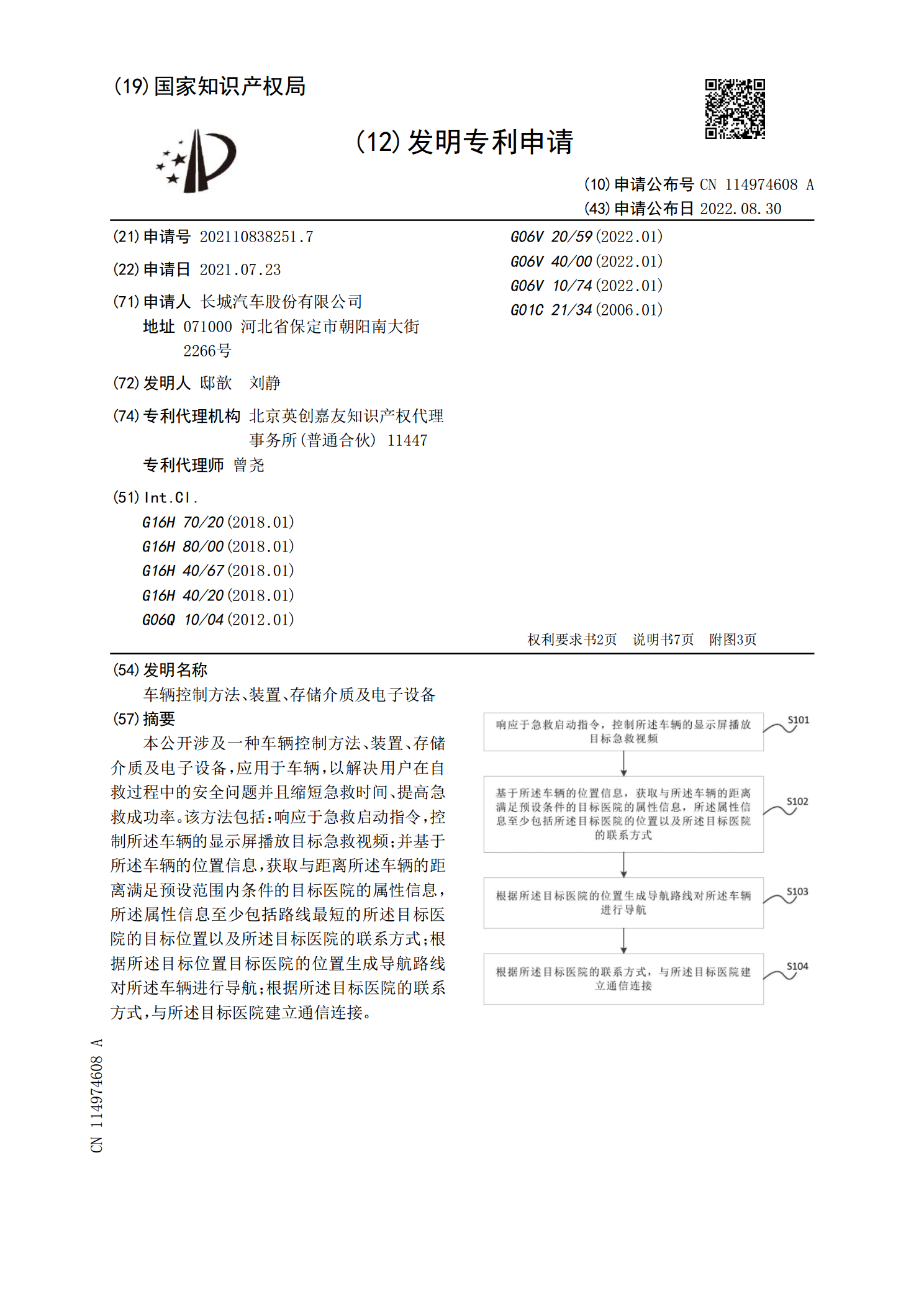
本公开涉及一种车辆控制方法、装置、存储介质及电子设备,应用于车辆,以解决用户在自救过程中的安全问题并且缩短急救时间、提高急救成功率。该方法包括:响应于急救启动指令,控制所述车辆的显示屏播放目标急救视频;并基于所述车辆的位置信息,获取与距离所述车辆的距离满足预设范围内条件的目标医院的属性信息,所述属性信息至少包括路线最短的所述目标医院的目标位置以及所述目标医院的联系方式;根据所述目标位置目标医院的位置生成导航路线对所述车辆进行导航;根据所述目标医院的联系方式,与所述目标医院建立通信连接。