
一种基于双目视觉、IMU和UWB融合的AGV定位导航方法.pdf

猫巷****傲柏

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于双目视觉、IMU和UWB融合的AGV定位导航方法.pdf
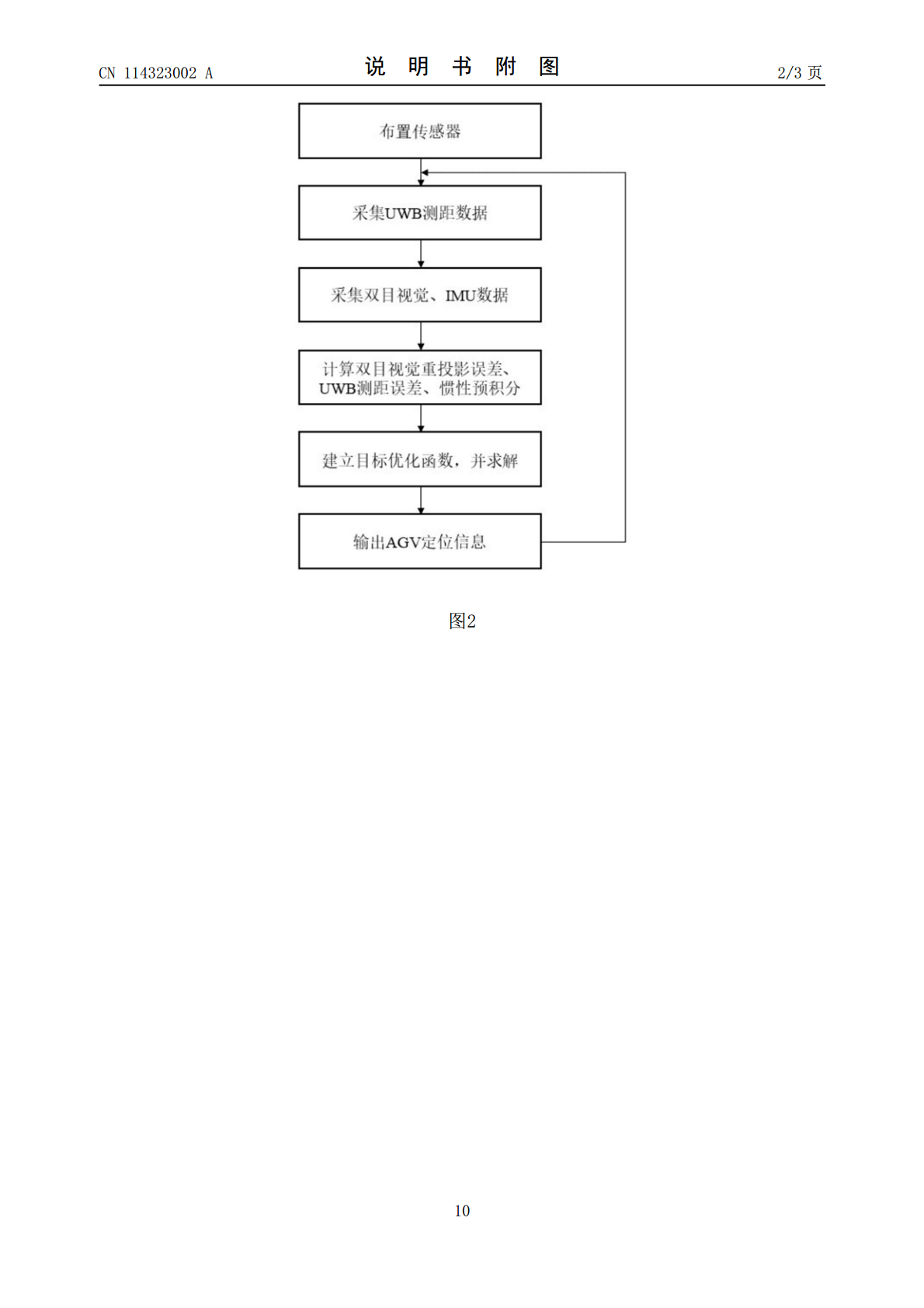
本发明提供一种基于双目视觉、IMU和UWB融合的AGV定位导航方法,在空间部属一个UWB基站,且在AGV上搭载UWB定位标签、双目相机和IMU;通过UWB信号在UWB基站和UWB定位标签之间的传播时间计算出两者之间的距离,采集双目相机数据、IMU中加速度计数据和陀螺仪数据;同时利用图像特征提取和跟踪算法得到特征点的像素坐标,根据IMU中加速度计数据和陀螺仪数据进行相邻两图像帧之间的惯性预积分;建立UWB测距残差、双目视觉重投影残差和惯性预积分残差三者之和的目标优化函数,采用非线性优化方法求解,从而实现AG

基于UWB、IMU与视觉融合的AGV导航定位系统研究的任务书.docx
基于UWB、IMU与视觉融合的AGV导航定位系统研究的任务书一、研究背景与意义自动化引领制造业发展的潮流,自动化物流系统的发展对于提升制造效益,降低成本具有巨大作用。自动化引导车(AGV)作为一种自动化导航运输工具,其实现了物料的自主精确定位与穿越复杂环境的能力,其发展也成为未来智能制造的重要组成部分。目前自动化引导车的定位技术主要依靠激光雷达、视觉、UWB(超宽带)等技术,其中激光雷达具有精度高和可靠性强的特点,但是价格昂贵,同时运行过程中容易受到灰尘和光线等环境因素的影响。视觉技术具有良好的鲁棒性,并
一种基于视觉的AGV巡线导航和定位方法.pdf
本发明公开了一种基于视觉的AGV巡线导航和定位方法,该方法包括:获得当前航向前方的图像;根据导航标线的第一预设特征,从图像中识别出符合第一预设特征的导航标线对象;获取AGV与导航标线的相对位置关系,并利用相对位置关系修正AGV的位置与航向。本发明采用图像采集设备替代磁导引传感器,采用彩色胶带铺设辅助路径,极大低降低了导航路径改造和维护成本。针对图像采集设备感知视野小的缺点,通过融合视觉特征和里程计信息,准确的跟踪AGV的实时位姿。同时,针对可移动设备侧滑、脚轮打滑等原因导致的里程计累计误差,通过设置全局坐

基于双目视觉与IMU的组合导航算法.pptx
添加副标题目录PART01PART02双目视觉原理IMU工作原理组合导航算法概述PART03图像采集与预处理特征提取与匹配姿态解算与位姿估计导航信息融合与路径规划PART04算法优势分析适用场景探讨与其他导航方式的比较PART05无人机导航应用机器人自主导航应用自动驾驶车辆导航应用算法效果评估与优化方向PART06算法改进与优化方向在新兴领域的应用前景技术发展面临的挑战与机遇感谢您的观看

基于双目视觉与IMU融合的SLAM算法研究.docx
基于双目视觉与IMU融合的SLAM算法研究基于双目视觉与IMU融合的SLAM算法研究摘要:随着无人系统领域的快速发展,同时双目视觉与惯性测量单位(IMU)相结合的同时,同步定位与地图构建(SLAM)算法在无人驾驶、增强现实等领域变得越来越重要。本文基于双目视觉和IMU传感器数据进行融合的SLAM算法进行了研究。首先介绍了SLAM算法的基本原理,然后分析了双目视觉和IMU的特点及其在SLAM中的应用。接下来,提出了一种基于扩展卡尔曼滤波(ExtendedKalmanFilter,EKF)的双目视觉与IMU融