
血管三维模型的确定方法以及装置.pdf

海昌****姐淑

1/10

2/10
3/10
4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

血管三维模型的确定方法以及装置.pdf
本发明公开了一种血管三维模型的确定方法以及装置。其中,该方法包括:获取目标对象的多个原始二维血管图像以及多个原始二维血管图像中每一个原始二维血管图像对应的角度信息;对多个原始二维血管图像中的每一个原始二维血管图像进行分割,得到目标对象的目标血管轮廓;基于每一个原始二维血管图像对应的角度信息确定至少两个光源的投射位置信息;控制至少两个光源按照投射位置信息向目标血管轮廓投射直线光束,以得到目标血管轮廓对应的血管三维模型。本发明解决了相关技术中在进行图像三维重构时,通过直接读取图像自带的拍摄角度信息,容易带有图
三维露头模型确定方法及装置.pdf
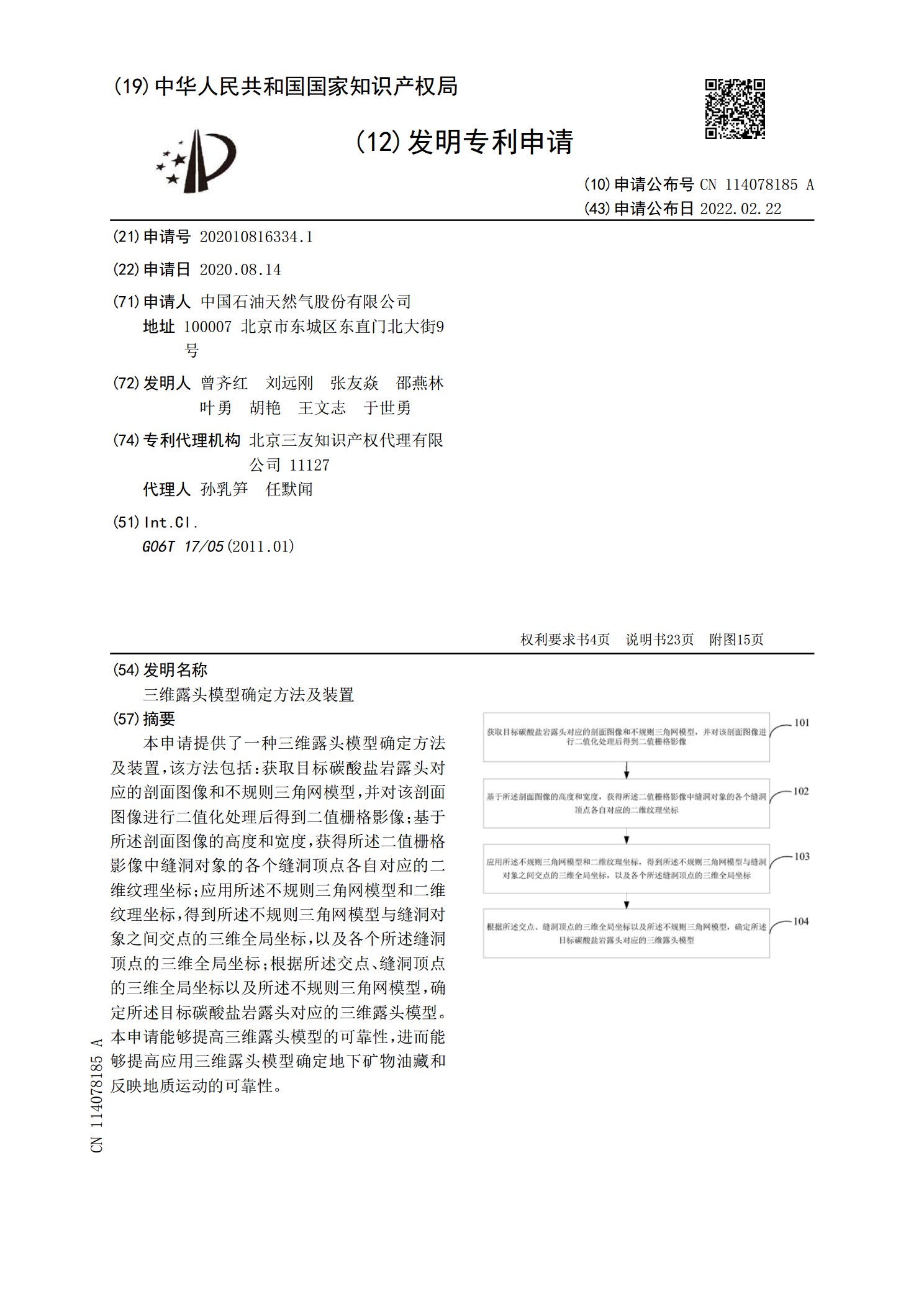
本申请提供了一种三维露头模型确定方法及装置,该方法包括:获取目标碳酸盐岩露头对应的剖面图像和不规则三角网模型,并对该剖面图像进行二值化处理后得到二值栅格影像;基于所述剖面图像的高度和宽度,获得所述二值栅格影像中缝洞对象的各个缝洞顶点各自对应的二维纹理坐标;应用所述不规则三角网模型和二维纹理坐标,得到所述不规则三角网模型与缝洞对象之间交点的三维全局坐标,以及各个所述缝洞顶点的三维全局坐标;根据所述交点、缝洞顶点的三维全局坐标以及所述不规则三角网模型,确定所述目标碳酸盐岩露头对应的三维露头模型。本申请能够提高
血管确定装置和血管确定方法.pdf
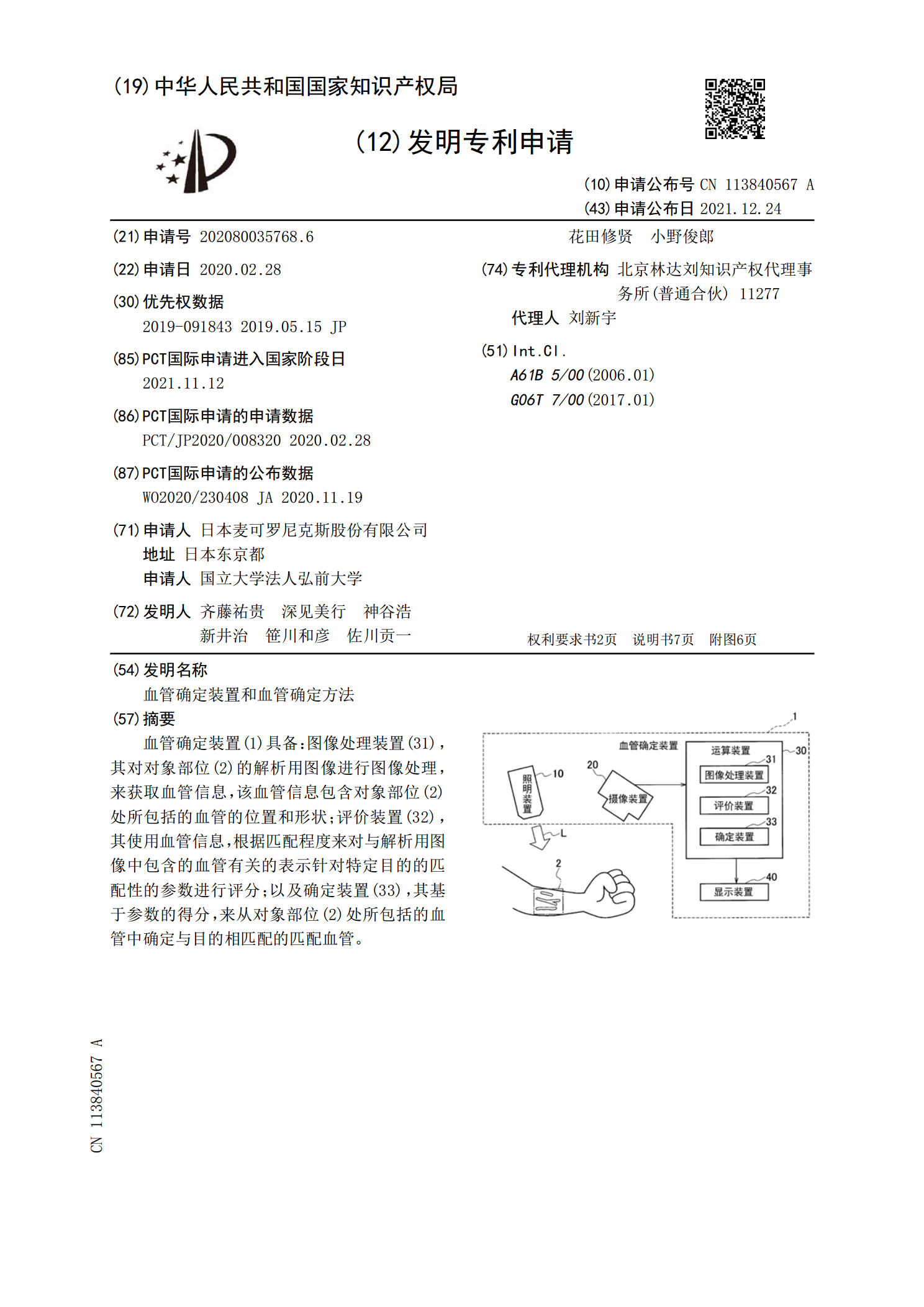
血管确定装置(1)具备:图像处理装置(31),其对对象部位(2)的解析用图像进行图像处理,来获取血管信息,该血管信息包含对象部位(2)处所包括的血管的位置和形状;评价装置(32),其使用血管信息,根据匹配程度来对与解析用图像中包含的血管有关的表示针对特定目的的匹配性的参数进行评分;以及确定装置(33),其基于参数的得分,来从对象部位(2)处所包括的血管中确定与目的相匹配的匹配血管。

三维血管模型的生成方法及其装置.pdf
本发明公开了一种三维血管模型的生成方法及其装置。其中,该方法包括:获取目标血管的血管轮廓的三维中心线,基于三维中心线生成目标血管的初始血管模型,对初始血管模型进行平滑处理,得到目标血管的三维血管模型。本发明解决了相关技术中无法实现对血管二维图像进行三维重构的技术问题。
负荷确定方法、模型训练方法、装置以及电子设备.pdf
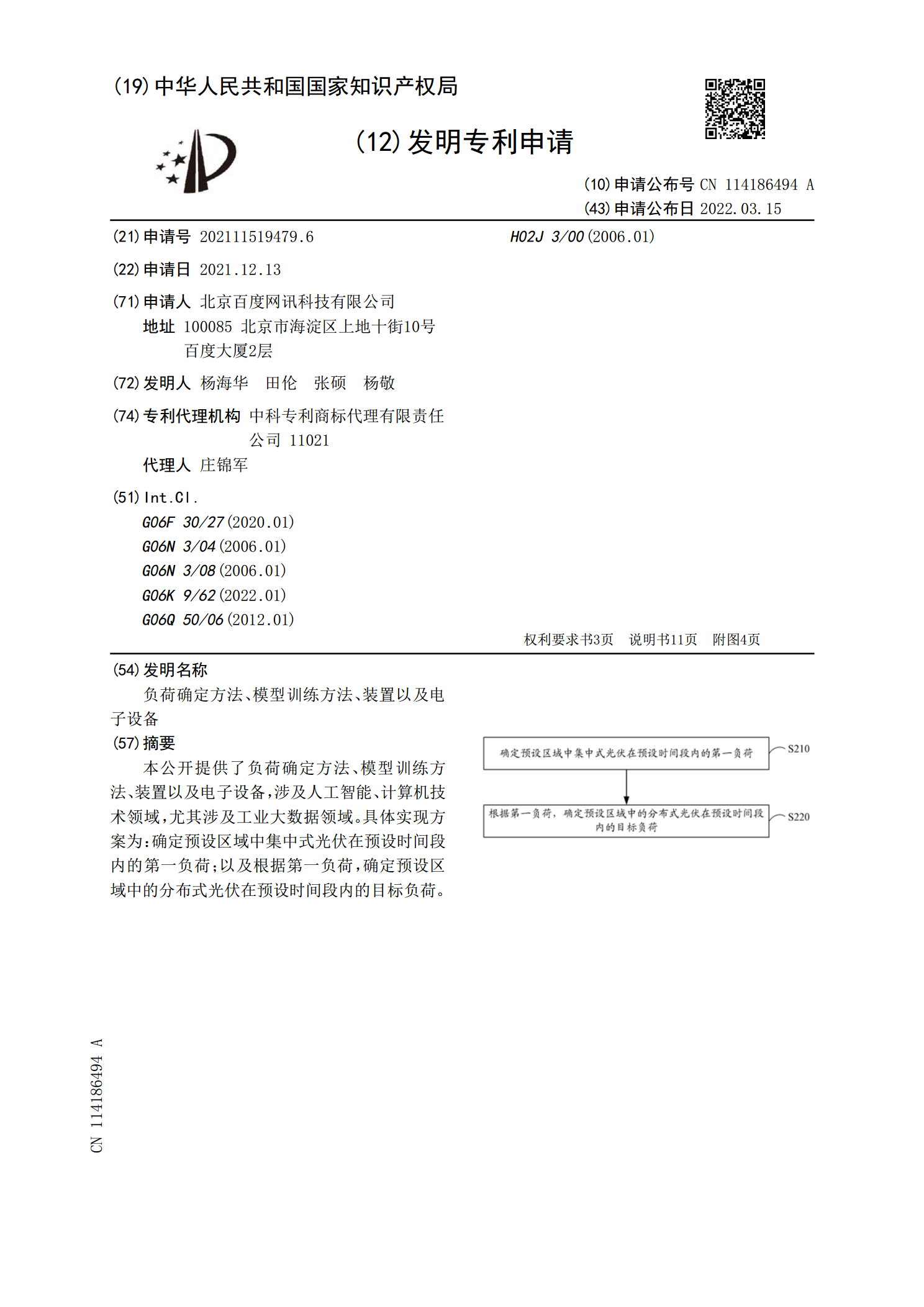
本公开提供了负荷确定方法、模型训练方法、装置以及电子设备,涉及人工智能、计算机技术领域,尤其涉及工业大数据领域。具体实现方案为:确定预设区域中集中式光伏在预设时间段内的第一负荷;以及根据第一负荷,确定预设区域中的分布式光伏在预设时间段内的目标负荷。