
一种监控视频的多目标跟踪方法及系统.pdf

小长****6淑


1/10

2/10
3/10
4/10

5/10

6/10

7/10
8/10
9/10

10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种监控视频的多目标跟踪方法及系统.pdf
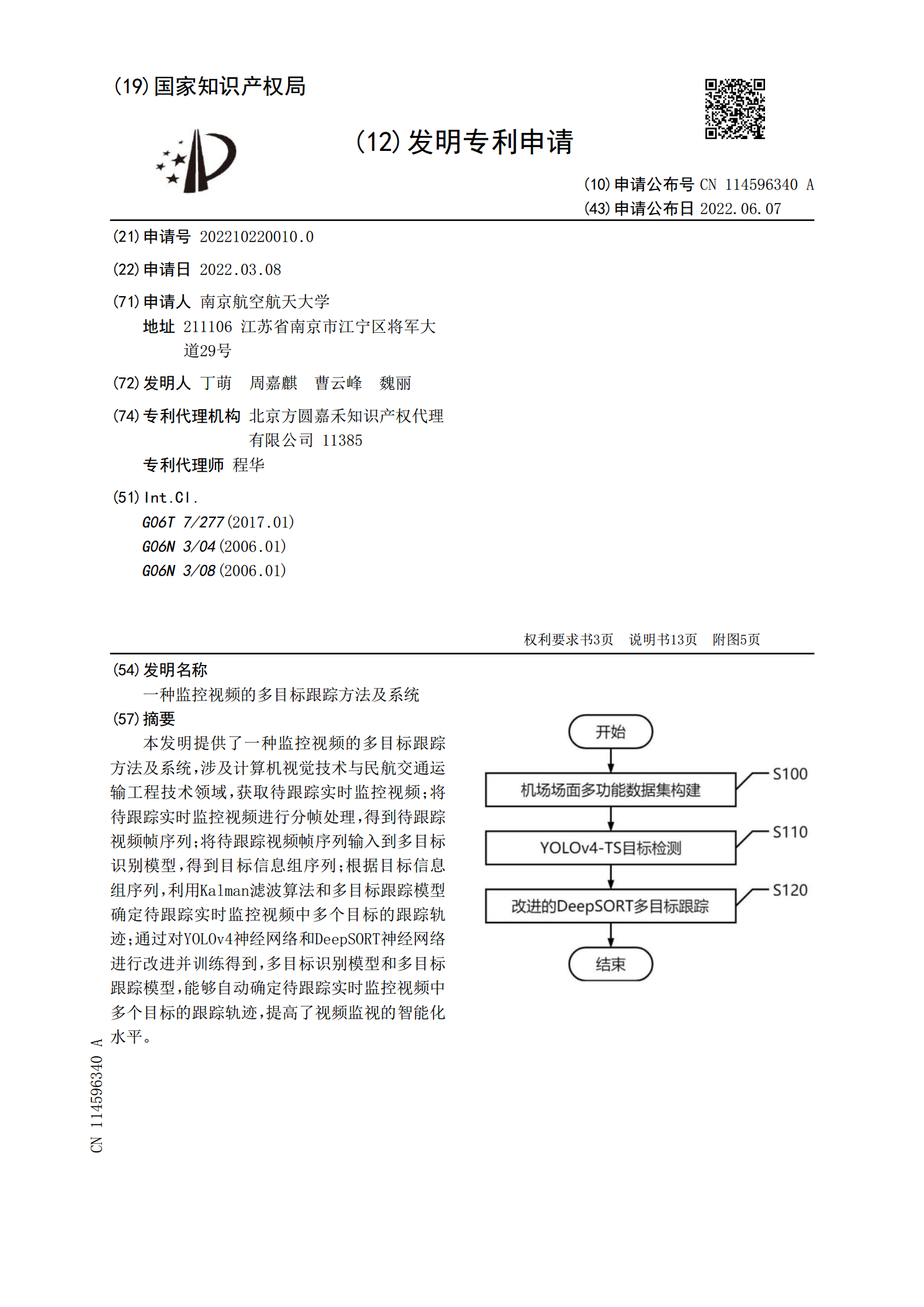
本发明提供了一种监控视频的多目标跟踪方法及系统,涉及计算机视觉技术与民航交通运输工程技术领域,获取待跟踪实时监控视频;将待跟踪实时监控视频进行分帧处理,得到待跟踪视频帧序列;将待跟踪视频帧序列输入到多目标识别模型,得到目标信息组序列;根据目标信息组序列,利用Kalman滤波算法和多目标跟踪模型确定待跟踪实时监控视频中多个目标的跟踪轨迹;通过对YOLOv4神经网络和DeepSORT神经网络进行改进并训练得到,多目标识别模型和多目标跟踪模型,能够自动确定待跟踪实时监控视频中多个目标的跟踪轨迹,提高了视频监视的
一种基于云端的监控视频下多目标跟踪的方法.pdf
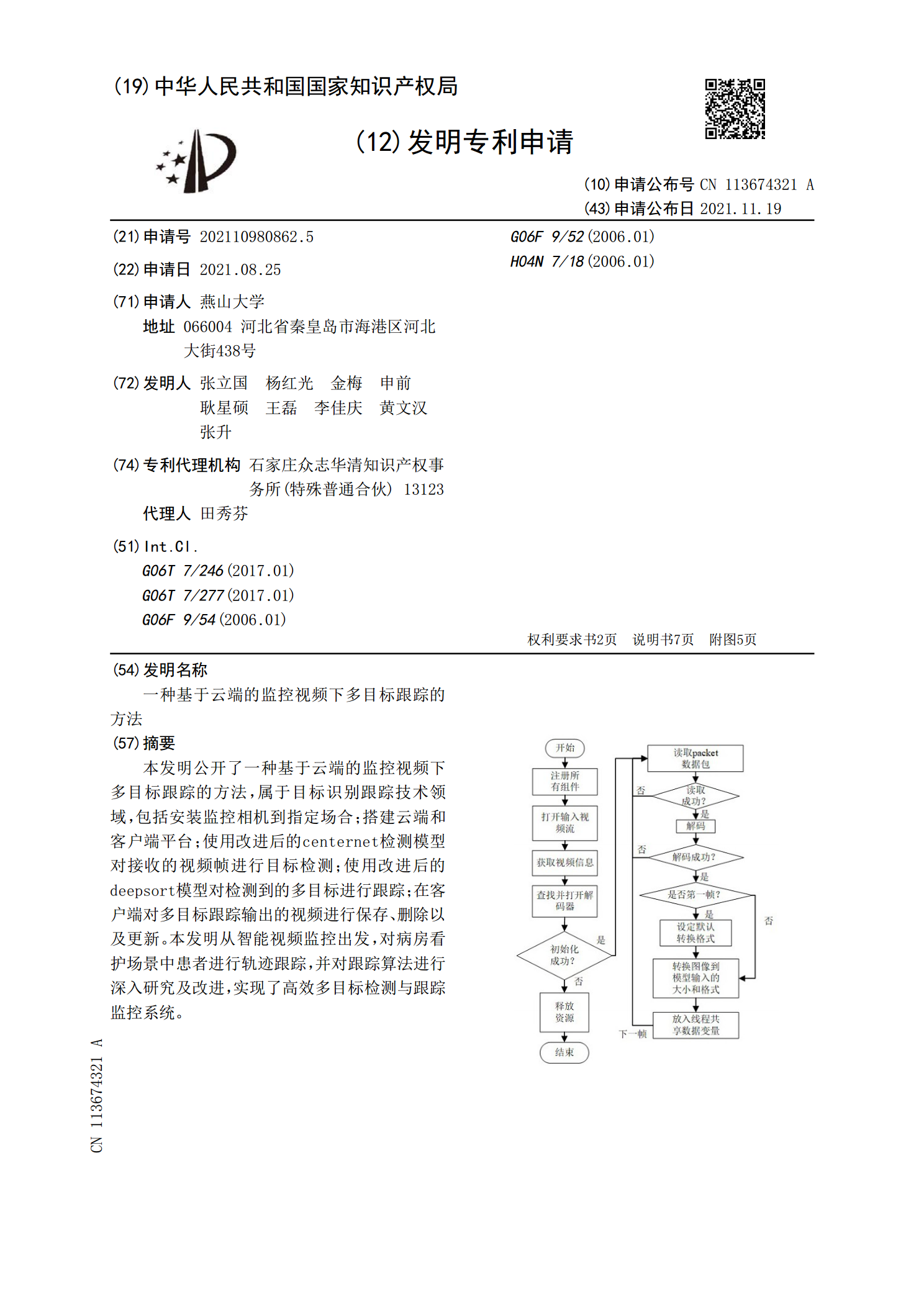
本发明公开了一种基于云端的监控视频下多目标跟踪的方法,属于目标识别跟踪技术领域,包括安装监控相机到指定场合;搭建云端和客户端平台;使用改进后的centernet检测模型对接收的视频帧进行目标检测;使用改进后的deepsort模型对检测到的多目标进行跟踪;在客户端对多目标跟踪输出的视频进行保存、删除以及更新。本发明从智能视频监控出发,对病房看护场景中患者进行轨迹跟踪,并对跟踪算法进行深入研究及改进,实现了高效多目标检测与跟踪监控系统。

一种监控系统的视频跟踪方法.pdf
一种监控系统的视频跟踪方法。系统包含:监控摄像机、IP网络、交换机和客户端组成。通过选定图像的跟踪目标框,将目标框的位置与大小分别传递给跟踪模块与检测模块;由跟踪模块进行目标跟踪得到新的目标框位置;由检测模块进行目标检测,通过将待检测窗口依次通过方差分类器,集合分类器和最近邻分类器,判断该检测窗口是否含有所求的目标;再通过综合模块得到最终的目标位置与大小,实现目标跟踪结果。如果目标丢失,则通过检测器重新初始化相关滤波跟踪模块,使得暂时丢失的目标被重新找回,进行新一轮的跟踪与检测,继续完成跟踪任务,实现监控

基于多目标跟踪的监控视频摘要系统的开题报告.docx
基于多目标跟踪的监控视频摘要系统的开题报告摘要系统的概念监控视频摘要系统旨在从长时间的监控视频中提取有价值的信息,并将其压缩为短时间的摘要视频。长时间的监控视频往往包含大量不相关的信息和冗余的图像数据,浪费了存储和处理资源。而监控视频摘要系统通过快速而高效的算法,可以提取出关键信息和重要事件,从而减少数据存储和减轻观察者的负担。多目标跟踪算法在监控视频摘要系统中,多目标跟踪算法是关键技术之一。它可以用于在监控视频中跟踪多个目标(例如人或车辆),并生成目标轨迹。多目标跟踪算法通常需要处理多目标之间的交互和遮

基于行人多目标跟踪的智能视频监控系统.docx
基于行人多目标跟踪的智能视频监控系统基于行人多目标跟踪的智能视频监控系统摘要:随着视频监控技术的不断发展和应用,智能视频监控系统已成为保障公共安全和社会稳定的重要手段之一。而行人多目标跟踪作为智能视频监控系统中的关键环节之一,具有重要的实际应用价值。本文基于行人多目标跟踪的智能视频监控系统,从行人目标检测、特征提取、跟踪算法等方面进行研究与探讨。通过实验证明,本系统能够实时准确地进行行人目标跟踪,为安全监控提供了有力支持。一、引言智能视频监控系统是指通过计算机视觉技术对视频进行实时监控分析和处理,从而自动